Vous aimerez peut-être aussi
- Evn 1Document75 pagesEvn 1Walid El Bahar100% (1)
- Exercices d'intégrales et d'équations intégro-différentiellesD'EverandExercices d'intégrales et d'équations intégro-différentiellesPas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Texier B. - Geometrie DifferentielleDocument108 pagesTexier B. - Geometrie DifferentiellepamathPas encore d'évaluation
- Pres Jordanisation PDFDocument25 pagesPres Jordanisation PDFothman okPas encore d'évaluation
- L Espace de BanachDocument38 pagesL Espace de BanachaminePas encore d'évaluation
- Cours Et Méthodes Equations Différentielles MPSI, PCSI, PTSIDocument1 pageCours Et Méthodes Equations Différentielles MPSI, PCSI, PTSIAlexis richéPas encore d'évaluation
- Boucetta Geo DiffDocument60 pagesBoucetta Geo DiffYOUSSEF AIT TIZIPas encore d'évaluation
- TD RiemannDocument2 pagesTD RiemannThierry Laarbi OmeyerPas encore d'évaluation
- TD 12020Document3 pagesTD 12020YOUSSEF AIT TIZIPas encore d'évaluation
- 7 Transformation de LaplaceDocument29 pages7 Transformation de LaplaceMateus Lanzi CiolaPas encore d'évaluation
- Acetates5 (Integrales Complexes)Document7 pagesAcetates5 (Integrales Complexes)Eng. NKURUNZIZA ApollinairePas encore d'évaluation
- Espaces Normés - Fonctions LipschitziennesDocument3 pagesEspaces Normés - Fonctions LipschitziennesHamza PrintoOsPas encore d'évaluation
- Chapitre1 BeamerDocument39 pagesChapitre1 BeamerAyoubPas encore d'évaluation
- Calcul DifférentielDocument12 pagesCalcul DifférentielMaxwellPas encore d'évaluation
- Espaces EuclidiensDocument13 pagesEspaces EuclidiensKarime AminePas encore d'évaluation
- Chapitre 1 - Logique Et Methodes de Raisonnment 4Document4 pagesChapitre 1 - Logique Et Methodes de Raisonnment 4y100% (1)
- Espace Vectoriel NormeeDocument8 pagesEspace Vectoriel NormeeSAra JamilPas encore d'évaluation
- Poly Calcul DiffDocument11 pagesPoly Calcul Diffmyo dadoPas encore d'évaluation
- Topologie - Continuité Et TopologieDocument4 pagesTopologie - Continuité Et Topologiegreat manPas encore d'évaluation
- 07 ConjgradDocument12 pages07 ConjgradBouabda BillalPas encore d'évaluation
- Espaces Vectoriels Norm Es: Feuille D'exercicesDocument10 pagesEspaces Vectoriels Norm Es: Feuille D'exercicesKoTenshi50% (2)
- 3e Maths L11 StatistiqueDocument18 pages3e Maths L11 StatistiquerosinPas encore d'évaluation
- PolynomesDocument32 pagesPolynomesHicham ElyassamiPas encore d'évaluation
- Planches D'oraux: Oraux de Mines-PontsDocument6 pagesPlanches D'oraux: Oraux de Mines-PontsSamia Karroumi100% (1)
- Théorème D'inversion LocaleDocument6 pagesThéorème D'inversion LocaleessaidialiPas encore d'évaluation
- Topologie PDFDocument35 pagesTopologie PDFAnas ChenchanaPas encore d'évaluation
- M1 Analyse Fonctionnelle Arada - NADIRDocument42 pagesM1 Analyse Fonctionnelle Arada - NADIRALFA -SILVERNIMOPas encore d'évaluation
- Plans Dans L'espaceDocument3 pagesPlans Dans L'espacetkdgeoPas encore d'évaluation
- Cours311 1Document7 pagesCours311 1Ahmed Khalil LekouchPas encore d'évaluation
- E de Cours: Analyse Convexe Et ApplicationsDocument37 pagesE de Cours: Analyse Convexe Et ApplicationsAzer TyuiopPas encore d'évaluation
- ExamenDocument4 pagesExamentahar zouaghiPas encore d'évaluation
- Poly Edo-Edp m1Document127 pagesPoly Edo-Edp m1Ulrich ToukamPas encore d'évaluation
- Cours Introductif de M2 Algèbres de Lie Semi-Simples Et Leurs ReprésentationsDocument64 pagesCours Introductif de M2 Algèbres de Lie Semi-Simples Et Leurs ReprésentationsErd NdinePas encore d'évaluation
- Complément TopoDocument21 pagesComplément TopoAbdellah MarzougPas encore d'évaluation
- 02 Resume Algebre Lineaire Sup PDFDocument6 pages02 Resume Algebre Lineaire Sup PDFSalaheddine ChiaarPas encore d'évaluation
- Cours Serie EntiereDocument21 pagesCours Serie EntiereÄbđøú Æzíz100% (1)
- CH JordanDocument22 pagesCH Jordandaniel moneyPas encore d'évaluation
- 12 - Exercices - Intégrales À Paramètre PDFDocument18 pages12 - Exercices - Intégrales À Paramètre PDFFaical BharPas encore d'évaluation
- Cor3 Tore Proj SphereDocument9 pagesCor3 Tore Proj SphereBey LpPas encore d'évaluation
- Algebre Chap 21Document10 pagesAlgebre Chap 21Nawel Ben AliPas encore d'évaluation
- Chapitre 2Document21 pagesChapitre 2ahamadouibt4Pas encore d'évaluation
- Polynômes de Chebyshev Et Théorème de WeiertrassDocument6 pagesPolynômes de Chebyshev Et Théorème de WeiertrassAly OUEDRAOGOPas encore d'évaluation
- S1VFDocument5 pagesS1VFAYMANE JAMALPas encore d'évaluation
- S2VFDocument4 pagesS2VFAYMANE JAMALPas encore d'évaluation
- S3VFDocument3 pagesS3VFAYMANE JAMALPas encore d'évaluation
- Série 1Document2 pagesSérie 1AYMANE JAMALPas encore d'évaluation
- CS1Document4 pagesCS1AYMANE JAMALPas encore d'évaluation
- K FoisDocument3 pagesK FoisAYMANE JAMALPas encore d'évaluation
- CS3Document5 pagesCS3AYMANE JAMALPas encore d'évaluation
- Série 2 Analyse 5Document2 pagesSérie 2 Analyse 5AYMANE JAMALPas encore d'évaluation
- Seance 2Document25 pagesSeance 2AYMANE JAMALPas encore d'évaluation
- Série 3Document2 pagesSérie 3AYMANE JAMALPas encore d'évaluation
- Séance 21-12-20Document28 pagesSéance 21-12-20AYMANE JAMALPas encore d'évaluation
- TD Dualité 2021Document2 pagesTD Dualité 2021AYMANE JAMAL100% (1)
- Seance 1Document25 pagesSeance 1AYMANE JAMALPas encore d'évaluation
- Séance 21-12-20Document28 pagesSéance 21-12-20AYMANE JAMALPas encore d'évaluation
- Série 2-Partie 2Document3 pagesSérie 2-Partie 2AYMANE JAMALPas encore d'évaluation
- Seance 4Document23 pagesSeance 4AYMANE JAMALPas encore d'évaluation
- 23 IntegralesCurvilignesMultiplesDocument2 pages23 IntegralesCurvilignesMultiplesait tizi aichaPas encore d'évaluation
- Corrigé1-DEVOIR2-Analyse 6 12-05Document5 pagesCorrigé1-DEVOIR2-Analyse 6 12-05AYMANE JAMALPas encore d'évaluation
- TD1 CorrDocument3 pagesTD1 CorrAYMANE JAMALPas encore d'évaluation
- Tsge Eff Juin 2017 Corrige Eff Juin 2017 Var 1 PDFDocument9 pagesTsge Eff Juin 2017 Corrige Eff Juin 2017 Var 1 PDFMed ChafikPas encore d'évaluation
- Les Classiques de La ReductionDocument27 pagesLes Classiques de La ReductionAYMANE JAMAL100% (1)
- Gauss SeidlDocument6 pagesGauss SeidlAYMANE JAMALPas encore d'évaluation
- DifférentielDocument115 pagesDifférentielLeRoiSoleilPas encore d'évaluation
- CS3Document5 pagesCS3AYMANE JAMALPas encore d'évaluation
- Comptabilité Des Opérations Courantes TCE & TSGE...Document128 pagesComptabilité Des Opérations Courantes TCE & TSGE...boussader93% (15)
- Exercices de La Semaine 16-03-20Document1 pageExercices de La Semaine 16-03-20AYMANE JAMALPas encore d'évaluation
- Corrigé Du Contrôle Mécanique Des Solides SMA4 P2021Document11 pagesCorrigé Du Contrôle Mécanique Des Solides SMA4 P2021AYMANE JAMALPas encore d'évaluation
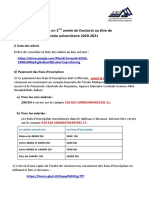
- Liste Admis en 1ere Annee de Doctorat STI 2020-2021Document1 pageListe Admis en 1ere Annee de Doctorat STI 2020-2021AYMANE JAMALPas encore d'évaluation
- 11 IntegralesAParametresDocument1 page11 IntegralesAParametresAYMANE JAMALPas encore d'évaluation
- Envoi3 18 19Document18 pagesEnvoi3 18 19Reed DoloPas encore d'évaluation
- DM 4 Topoooooo!!Document9 pagesDM 4 Topoooooo!!anas achmitPas encore d'évaluation
- CCP 2003 MP M1 Corrige PDFDocument8 pagesCCP 2003 MP M1 Corrige PDFYoussef El FahimePas encore d'évaluation
- DM 06 - Applications PropresDocument2 pagesDM 06 - Applications PropresJesser DridiPas encore d'évaluation
- Hoscheit BertinDocument18 pagesHoscheit BertinSaaj Alfred JarryPas encore d'évaluation
- PC3 CorrectionDocument7 pagesPC3 Correction段文博Pas encore d'évaluation
- Bouguerra KarimaDocument59 pagesBouguerra KarimaNajeh TahriPas encore d'évaluation
- M2 EdpDocument272 pagesM2 EdpLet us DancePas encore d'évaluation
- 03 TH3 - BrichantDocument35 pages03 TH3 - BrichantAf RymPas encore d'évaluation
- TD 02 Espaces Vectoriels NormésDocument2 pagesTD 02 Espaces Vectoriels NormésTaha SabirPas encore d'évaluation
- Cours Topologie 2020 2021Document84 pagesCours Topologie 2020 2021Endjy LaguerrePas encore d'évaluation
- Introduction Analyse AppliquéeDocument92 pagesIntroduction Analyse AppliquéeArthur VincendeauPas encore d'évaluation
- Démonstration Du Théorème de Tychonov - BayartDocument8 pagesDémonstration Du Théorème de Tychonov - BayartDeswynPas encore d'évaluation
- 3.3 Espaces Vectoriels Norm Es, Espaces de BanachDocument4 pages3.3 Espaces Vectoriels Norm Es, Espaces de BanachAbderrahim El amraniPas encore d'évaluation
- Theorie Des Fonctions Holomorphes de Plusieurs VariablesDocument258 pagesTheorie Des Fonctions Holomorphes de Plusieurs VariablesScirro Brown50% (2)
- Poster Suites Series FonctionsDocument2 pagesPoster Suites Series FonctionsRebbag AnassPas encore d'évaluation
- Cours L2 A&T PDFDocument46 pagesCours L2 A&T PDFIsmail M'riniPas encore d'évaluation
- Suites Définis Par Itération, Point FixeDocument5 pagesSuites Définis Par Itération, Point FixeYassine BenbrahimPas encore d'évaluation
- evncoursNP OnecolumnDocument28 pagesevncoursNP OnecolumnalchamelgoldPas encore d'évaluation
- Rida Laraki, Jérôme Renault, Sylvain Sorin Bases Mathématiques de La Théorie Des JeuxDocument137 pagesRida Laraki, Jérôme Renault, Sylvain Sorin Bases Mathématiques de La Théorie Des JeuxKarim AdamPas encore d'évaluation
- Exo Espace Vec Norme PDFDocument13 pagesExo Espace Vec Norme PDFAmine Lahlal50% (2)
- Cours Complet de TopologieDocument60 pagesCours Complet de TopologieKygoPas encore d'évaluation
- M2edp PDFDocument214 pagesM2edp PDFAnonymous 4qfK8SzqEYPas encore d'évaluation
- Correction Partiel 2019 Analyse FonctionnelDocument2 pagesCorrection Partiel 2019 Analyse FonctionnelReed DoloPas encore d'évaluation
- A F Chapitre1Document20 pagesA F Chapitre1Mohamed Amine NejjariPas encore d'évaluation
- TopologieDocument122 pagesTopologieA.Benhari100% (3)
- Philosc09 Lichnerowicz 1965Document34 pagesPhilosc09 Lichnerowicz 1965hilladeclackPas encore d'évaluation
- 203 - Utilisation de La Notion de Compacité: 1 GénéralitésDocument5 pages203 - Utilisation de La Notion de Compacité: 1 GénéralitésAnass TakfaPas encore d'évaluation
- M303 Chap 5Document5 pagesM303 Chap 5Cheujeu chaldouPas encore d'évaluation
- L2PS PolyDocument93 pagesL2PS PolyEld AyoubPas encore d'évaluation