Académique Documents
Professionnel Documents
Culture Documents
A - Decompoiscao - Vetores - em - Uma - Base - Ortogonal
Transféré par
jcmcatardoTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
A - Decompoiscao - Vetores - em - Uma - Base - Ortogonal
Transféré par
jcmcatardoDroits d'auteur :
Formats disponibles
Os vetores e suas bases
Objetivos: Definir o vetor posição e representar os vetores de um plano
utilizando bases ortogonais.
Introdução
Nas Aulas 1 iniciamos a discussão do movimento dos corpos.
Concluímos que a escolha do ponto de observação é muito importante na
descrição dos movimentos dos corpos. Descrevemos o movimento de alguns
corpos (carrinho em um trilho de ar, esferas etc) tratando-os como
partículas. Falamos sobre trajetórias e deslocamentos. Nessa aula vamos
definir os conceitos do vetor posição. Serão discutidas também as
decomposições de vetores em bases ortogonais.
Essa aula é composta por três partes:
O que sei sobre a decomposição de vetores e sobre o vetor posição? é
um questionário que tem como finalidade levantar as suas idéias prévias
sobre estes assuntos.
Decomposição de vetores em bases ortogonais é um texto onde o
assunto é discutido.
Maria Antonieta Almeida 12-22
O que sei o vetor posição e a decomposição de vetores
em bases ortogonais?
As questões apresentadas a seguir têm como finalidade
investigar e organizar os seus conhecimentos e idéias prévias
sobre a decomposição e vetores em bases ortogonais e o vetor
posição. Escreva em seu caderno, de forma organizada, as
respostas às questões. Não consulte livros ou notas de aulas, mas
não deixe de respondê-las. A comparação entre suas idéias e
conhecimentos sobre a decomposição de vetores em bases
ortogonais e o vetor posição depois de trabalhar esta aula é
importante para o seu aprendizado.
Questionário 1
1. O que é um vetor unitário?
)
2. Como se projeta um vetor na direção de um vetor unitário u ?
Dê exemplos.
3. O que é uma base de vetores ortogonais? Dê exemplos.
4. O que são componentes de um vetor em uma base ortogonal?
Dê exemplos.
5. Enuncie a regra para somar vetores utilizando as suas
componentes.
6. O que é o vetor posição?
Maria Antonieta Almeida 12-23
Projeção de vetores
A regras para a somar de vetores e multiplicar vetores por
números reais apresentadas na Aula 1 são geométricas. Elas têm o
inconveniente de dependerem da qualidade dos desenhos
elaborados. Nesta aula, vamos transformar estas regras em soma e
multiplicação de números reais. Com esta finalidade vamos
representar os vetores em bases apropriadas. Esta decomposição
aparece naturalmente quando fazermos a seguinte pergunta:
Quantos vetores existem em um plano? Infinitos!!
Será eles estão relacionados?
Mostraremos a seguir que qualquer vetor de um plano pode ser
representado como a combinação linear de dois vetores com
direções diferentes.
r
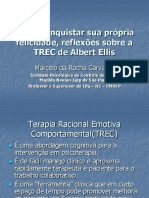
Na Figura 28, vemos que o vetor d1 pode ser
escrito como a soma de dois vetores paralelos aos
r r r r r
vetores d 2 e d 3 , isso é, d1 = d12 + d13 .
r r
Os vetores d 12 tem a mesma direção do vetor d 2 e
r r
o vetor d13 tem a mesma direção do vetor d 3 .
r r
Portanto, podemos escrever d 12 = α d 2 e
r r
d13 = β d 3 . Conseqüentemente, temos que
r r r r
d1 = αd12 + βd13 . Dizemos que d 12 é a projeção
r r r
do vetor d1 na direção do vetor d 2 e que d13 é a
r r
projeção do vetor d1 na direção do vetor d 3 . A
r r
soma αd12 + βd13 é denominada combinação em uma base obliqua.
Figura 28-Decomposição de vetores
r r
linear dos vetores d 2 e d 3 .
Por uma questão de simplicidade, escolhe-se
representar todos os vetores de um plano em
termos de dois vetores unitários perpendiculares.
Vetores unitários são aqueles que tem módulo um.
Eles são representados por uma letra com um
acento circunflexo em cima, por exemplo, iˆ .
Dizemos nesse caso, que os vetores unitários
formam uma base ortogonal para os vetores do
plano. Os vetores unitários mais utilizados são
aqueles que tem a direção e o sentido dos eixos.
Figura 29-Decomposição de vetores
No caso dos eixos OX e OY eles são
em uma base ortogonal.
denominados comumente por iˆ e ĵ
r
.Na Figura 29 estão representados o vetor d1 , as bases iˆ e ĵ e
r
as projeções do vetor d1 na base escolhida. A projeção do vetor PROJEÇÃO DE
r r UM VETOR
d1 na direção do unitário iˆ foi denominada por d1x e aquela
Maria Antonieta Almeida 12-24
r r r
na direção do unitário ĵ por d1 y . As projeções d1x e d1 y
podem ser escritas da seguinte forma:
r r
d1x = d1x iˆ ; dy = d1 y iˆ , onde d1x é o número que deve COMPONENTES
r DE UMVETOR
multiplicar a base iˆ para se obter o vetor projetado d1x na
direção do unitário iˆ e d1y é o número que se deve multiplicar a
r
base ĵ para se obter d1 y . Os números d1x e d1y são
r
denominados de componentes do vetor d1 nas direções dos
vetores unitários iˆ e ĵ . Na Figura 30, observamos que as
r r
componentes d1x , d1y e d2y dos vetores d1 e d 2 são positivas e
que a componente d2x é negativa. A componente d2x é negativa
r
porque para se obter o vetor projetado d 2 x a partir do vetor unitário
iˆ é necessário multiplicá-lo por um número negativo, uma vez que
r
o sentido de d 2 x é contrário ao sentido de iˆ .
Figura 30- Sinais das componentes dos vetores
P13-O que é um vetor unitário?
)
P14-Como se projeta um vetor na direção de um vetor unitário u ? Dê exemplos.
P15-O que é uma base de vetores ortogonais? Dê exemplos.
P16-O que são componentes de um vetor em uma base ortogonal? Dê exemplos.
Exemplo2: A Figura 23 mostra um carro que parte do ponto A e se
desloca até um ponto B que dista 80 km de A. A reta que une os
pontos A e B faz um ângulo de 45o com o eixo OX .
a. Desenhe o vetor deslocamento do carro.
r r
b. Desenhe os vetores projetados d x e d y .
c. Calcule as componentes dx e dy do vetor deslocamento do
carro nas direções dos vetores unitários iˆ e ĵ .
r r
d. Escreva os vetores projetados d x e d y em função dos vetores
unitários iˆ e ĵ .
Maria Antonieta Almeida 12-25
ĵ
iˆ
Figura 31 – Um carro que se desloca 80 km na direção nordeste.
Resolução:
a. O vetor deslocamento do carro vai de A até B e está desenhado
na Figura 32-a.
ĵ
iˆ
Figura 32-a
r
b. Para projetar o vetor deslocamento d na direção do vetor
unitário iˆ é necessário levantar duas retas perpendiculares à
direção do vetor unitário iˆ , a partir do eixo OX , e que passem pelo
r r
início e pelo final de d (Figura 32b). O vetor projetado d x é
aquele que tem a direção ao vetor unitário iˆ , com o módulo igual
r
a distância entre as retas que o projetaram e o sentido do vetor d
(veja Figura 23-b).
r
Para projetar o vetor deslocamento d na direção do vetor unitário
)
j é necessário levantar duas retas perpendiculares à direção do
vetor unitário ĵ a partir do eixo OY que passem pelo início e pelo
r r
final de d (Figura 26.b). O vetor projetado d y é aquele tem a
)
direção do vetor unitário j , com o módulo igual a distância entre
r
as retas que o projetaram e o sentido do vetor d (veja Figura 26-b).
Maria Antonieta Almeida 12-26
Figura 32-b
c. A componente d x é o número que se deve multiplicar o vetor
r
unitário iˆ para se obter o vetor projetado d x . O módulo da
r
componente d x = d x é igual ao módulo do vetor projetado. O
módulo da componente d x pode ser calculado por trigonometria,
uma vez que,
r
dx r 2
cos(45 o ) = ⇒ d x = d cos(45 o ) = d = 40 2 km ⇒ d x = 40 2 km
d 2
.
r
Como o vetor d x tem o mesmo sentido do vetor unitário iˆ , a
componente d x é positiva e igual a 40 2 km .
A componente d y é o número que se deve multiplicar o vetor
r
unitário ĵ para se obter o vetor projetado d y . O módulo da
r
componente d y = d y é igual ao módulo do vetor projetado. O
módulo da componente d y pode ser calculado por trigonometria,
uma vez que,
r
dy r 2
sen(45 o ) = ⇒ d y = d sen(45 o ) = d = 40 2 km ⇒ d y = 40 2 km
d 2
.
r
Como o vetor d y tem o mesmo sentido do vetor unitário ĵ , a
componente d y é positiva e igual a 40 2 km .
)
d. Os vetores projetados escritos em função dos unitários iˆ e j
são:
r r
d x = 40 2 iˆ (km) e d y = 40 2 ˆj (km) .
Exemplo 3: A Figura 33 mostra um carro que parte do ponto A e se
desloca até um ponto B que dista 80 km de A. A reta que une os
pontos A e B faz um ângulo de 135o com o eixo OX .
Desenhe o vetor deslocamento do carro.
r r
a. Desenhe os vetores projetados d x e d y .
Maria Antonieta Almeida 12-27
b. Calcule as componentes dx e dy do vetor deslocamento do carro
nas direções dos vetores unitários associados aos eixos
representados na Figura 24.
r r
c. Escreva os vetores projetados d x e d y em função dos vetores
unitários iˆ e ĵ .
Figura 33
Resolução:
r
a. O vetor deslocamento d do carro vai de A até B e está
desenhado na Figura 34-a.
Figura 34-a
r
b. Para projetar o vetor deslocamento d na direção do vetor
unitário iˆ é necessário levantar duas retas perpendiculares à
direção do vetor unitário iˆ a partir do eixo OX que passem pelo
r r
início e pelo final de d (Figura 34.b). O vetor projetado d x é
aquele que tem a direção ao vetor unitário iˆ , com o módulo igual
r
a distância entre as retas que o projetaram e o sentido do vetor d
(veja Figura 34-b).
r
Para projetar o vetor deslocamento d na direção do vetor unitário
)
j é necessário levantar duas retas perpendiculares à direção do
vetor unitário ĵ a partir do eixo OY que passem pelo início e pelo
r r
final de d (Figura 24.b). O vetor projetado d y é aquele tem a
)
direção do vetor unitário j , com o módulo igual a distância entre
r
as retas que o projetaram e o sentido do vetor d (veja Figura 34-b).
Maria Antonieta Almeida 12-28
Figura 34-b
c. A componente d x é o número que se deve multiplicar o vetor
r
unitário iˆ para se obter o vetor projetado d x . O módulo da
r
componente d x = d x é módulo do vetor projetado. O módulo da
componente d x pode ser calculado por trigonometria, uma vez
que,
r
dx r 2
cos(45 o ) = ⇒ d x = d cos(45 o ) = d = 40 2 km ⇒ d x = 40 2 km
d 2
.
r
Como o vetor d x tem o sentido contrário ao do vetor unitário iˆ , a
componente é negativa e igual a − 40 2 km .
A componente d y é o número que se deve multiplicar o vetor
r
unitário ĵ para se obter o vetor projetado d y . O módulo da
r
componente d y = d y é igual ao módulo do vetor projetado. O
módulo da componente d y pode ser calculado por trigonometria,
uma vez que,
r
dy r 2
sen(45 o ) = ⇒ d y = d sen(45 o ) = d = 40 2 km ⇒ d y = 40 2 km
d 2
.
r
Como o vetor d y tem o mesmo sentido do vetor unitário ĵ , a
componente d y é positiva e igual a 40 2 km .
)
d. Os vetores projetados escritos em função dos unitários iˆ e j
são:
r r
d x = −40 2 iˆ (km) e d y = 40 2 ˆj (km) .
Os exemplos 2 e 3 mostram que é possível caracterizar
completamente um vetor em um plano fornecendo-se ou as suas
componentes d x e d y ou o seu módulo d (tamanho) e ângulo θ
Maria Antonieta Almeida 12-29
medido no sentido anti-horário a partir da direção do eixo OX (e a
sua direção e sentido). A representação de um vetor que utiliza o
seu módulo e o ângulo que ele forma com o eixo OX é
denominada de polar e aquela que utiliza as componentes nas
direções dos unitários dos eixos é denominada de cartesiana. A
relação entre estas duas representações de vetores pode ser
deduzida facilmente da Figura 35.
Representação
polar de um vetor
em um plano.
Figura 35- Representações polar e cartesiana de um vetor
Se são conhecidos d e θ é possível se obter d x e d y com as
seguintes relações:
d x = d cos(θ ) ; d y = d sen(θ ) .
Quando são conhecidos d x e d y é possível se obter d e θ com as
seguinte relações:
dy
d = d x2 + d y2 e θ = arctan( ).
dx
A Figura 36 mostra as componentes da soma de dois vetores é a
soma das componentes, isso é, se
r r r
a = b + c ⇒ a x = bx + c x e a y = b y + c y .
Figura 36- Componentes de uma soma de vetores
P17-Enuncie a regra para somar vetores utilizando as suas componentes.
Exemplo 4. Um carro se desloca 80 km entre os pontos A e B e a
seguir 40km entre os pontos B e C (veja Figura 37). Os
deslocamentos são retilíneos. A reta que une os pontos A e B tem a
Maria Antonieta Almeida 12-30
direção leste-oeste e aquela que une os pontos B e C forma um
ângulo de ângulo de 30o com a direção leste –oeste.
Figura 37
r
a. Desenhe os vetores deslocamentos entre os pontos A e B ( d1 ) ,
r r
entre os pontos B e C ( d 2 ) e entre os pontos A e C ( d 3 ).
r r
b. Encontre as componentes dos vetores d1 e d 2 na direção dos
eixos OXY desenhados na Figura 30.
r
c. Encontre as componentes do vetor d 3 na direção vetores
r
unitários iˆe ˆj desenhados na Figura 30. Expresse o vetor d 3 em
termos dos destes vetores unitários.
r
d. Encontre o módulo do deslocamento d3 .
Resolução:
r r r
a. O vetores deslocamentos d1 , d 2 e d 3 estão representados na
Figura 38-a.
ĵ
Figura 38-a
)
i
r
b. A Figura 27-a mostra que o vetor projetado d1x é igual ao
r r
vetor d1 . O vetor projetado d1 y é nulo porque as duas retas
)
perpendiculares ao vetor unitário j que projetam o vetor
r
d1 neste eixo coincidem. Por isso, as componentes do vetor
r
d1 são: d1x = d1 e d 2 y = 0 .
Maria Antonieta Almeida 12-31
)
j
)
i
Figura 38-b
r r
Na Figura 38-b estão representados os vetores d 2 x e d 2 y . Os
r
módulos das componentes do vetor d 2 são:
r r
d 2 x = d 2 x = 40 cos(30 o ) = 20 3 km e d 2 y = d 2 y = 40 sen(30 o ) = 20 km .
As componentes d 2 x e d 2 y são positivas , uma vez que, os
r r
vetores projetados d 2 x e d 2 y têm os mesmos sentidos dos
)
vetores unitários i e ˆj . Portanto, temos que:
d 2 x = 20 3 km e d 2y = 20 km .
c. As componentes do vetor deslocamento são:
d 3 x = d 1x + d 2 x = (80 + 20 3 ) km ≡ 115 km e d 3 y = d1 y + d 2 y = 20km.
r
Portanto temos que: d 3 = (115 iˆ + 20 ˆj ) km .
v
d. O módulo do vetor d 3 é d 3 = d 32x + d 32y ≅ 116 km .
A decomposição de vetores do espaço tridimensional requer
três bases. Uma das bases mais utilizadas é aquela que utiliza os
vetores unitários iˆ, ˆj e kˆ nas direções dos eixos OX, OY e OZ. A
r
Figura mostra as projeções do vetor d nas direções destes
unitários.
Figura Base tridimensional
Maria Antonieta Almeida 12-32
r ) )
Nesta base, o vetor d é representado por d = d x iˆ + d y j + d z k ,
onde d x , d y e d z são as componentes do vetor .
P Veriique a veracidade da decomposição anterior.
Existem grandezas que têm módulo, direção e sentido e não
são vetores. Por exemplo, as rotações em torno de um eixo. Toda
rotação tem um eixo de rotação, um ângulo de rotação e um sentido
(horário ou anti-horário). No entanto, você aprenderá da disciplina
de Física I que duas rotações não se somam segundo a regra do
paralelogramo.
Várias grandezas físicas que são vetores. Na Aula 3 alguns
desses vetores serão discutidos.
Exercício : Na Figura 19 repetida a seguir estão representados os
alguns vetores . Calcule componentes dos seguintes vetores:
r r r r r
a. d1 , d 2 , d 3 , d 4 e d 5
r r r
b. d = d1 + d 5
r r
c. d = −2d 3
r
r d1
d. d = r
d1
r r r
e. d = d1 − 2d 3
r r r r
f. d = d1 + d 4 + d 5
)
j
)
O i
X
Considere o tamanho do quadriculado como unidade.
Nesta aula representamos os vetores de um plano utilizando bases ortogonais.
Maria Antonieta Almeida 12-33
Vous aimerez peut-être aussi
- Manual Dos Exames CardíacosDocument45 pagesManual Dos Exames CardíacosMatheus BaraldiPas encore d'évaluation
- Vale Da Estranheza (Anna Wiener)Document246 pagesVale Da Estranheza (Anna Wiener)Antonio AndradePas encore d'évaluation
- Violência contra idosos no seio familiar em MaputoDocument51 pagesViolência contra idosos no seio familiar em MaputoJoão Samuel MandauaPas encore d'évaluation
- A Noite Dos Palhaços Mudos - 6º TratamentoDocument10 pagesA Noite Dos Palhaços Mudos - 6º TratamentojulianoluccasPas encore d'évaluation
- ABC Da Avaliação Da PG em EducaçãoDocument16 pagesABC Da Avaliação Da PG em EducaçãoSheila CaetanoPas encore d'évaluation
- EGU 18 20 BR 2016 TD WebDocument4 pagesEGU 18 20 BR 2016 TD WebGliceu Grossi100% (1)
- Arquitetura e Urbanismo em Contexto de PandemiaDocument35 pagesArquitetura e Urbanismo em Contexto de PandemiaDiego FernandesPas encore d'évaluation
- Todos os benefícios da Moringa para a saúdeDocument4 pagesTodos os benefícios da Moringa para a saúdeJosé Canamala PhiriPas encore d'évaluation
- Desmontagem e Montagem do Trem de Força da Carregadeira de Rodas 924HDocument12 pagesDesmontagem e Montagem do Trem de Força da Carregadeira de Rodas 924Htomsouza100% (1)
- Novas Práticas para o Ensino MédioDocument319 pagesNovas Práticas para o Ensino MédioLipeh FamaPas encore d'évaluation
- Ficha I Massa e Tamanho Dos ÁtomosDocument17 pagesFicha I Massa e Tamanho Dos ÁtomosTeresa BernardoPas encore d'évaluation
- Processo Justo e Contraditório Dinamico - Humberto Theodoro JúniorDocument8 pagesProcesso Justo e Contraditório Dinamico - Humberto Theodoro JúniorAlfredo José ScPas encore d'évaluation
- 1 - Evolução Do Modelo AtómicoDocument11 pages1 - Evolução Do Modelo AtómicoAnabela MachadoPas encore d'évaluation
- Slide Cálculos Químicos e EstequiométricosDocument44 pagesSlide Cálculos Químicos e Estequiométricoslidiacarolineferreira.silva2Pas encore d'évaluation
- Código de Falhas InverterDocument2 pagesCódigo de Falhas InverterAlchemist7Pas encore d'évaluation
- Cravo Da Índia - Seus Poderes Mágicos - Oficina PDFDocument4 pagesCravo Da Índia - Seus Poderes Mágicos - Oficina PDFElton Castorino100% (2)
- 10 - A+º+úo de Indeniza+º+úo Erro M+®dico - Cumulada Danos Morais e Est+®ticos - Responsabilidade CivilDocument14 pages10 - A+º+úo de Indeniza+º+úo Erro M+®dico - Cumulada Danos Morais e Est+®ticos - Responsabilidade CivilCamila PinheiroPas encore d'évaluation
- Regulamenta queima controlada e solidáriaDocument5 pagesRegulamenta queima controlada e solidáriaAldemir AlmirPas encore d'évaluation
- Continuidade dos Parques - ResumoDocument1 pageContinuidade dos Parques - ResumoCesar SinicioPas encore d'évaluation
- Como conquistar a felicidade com a TRECDocument112 pagesComo conquistar a felicidade com a TRECRita De Cassia MathaisPas encore d'évaluation
- Argumentação oral escolarDocument416 pagesArgumentação oral escolarcarlabertulezaPas encore d'évaluation
- Agentes BiológicosDocument43 pagesAgentes Biológicosluis_carlos_467009100% (2)
- 7 ErrosDocument20 pages7 Errosrenatamruiz100% (3)
- Práticas baseadas em evidências na PsicologiaDocument27 pagesPráticas baseadas em evidências na PsicologiaChristiano RodriguesPas encore d'évaluation
- Alimentos limpos e impuros segundo a BíbliaDocument10 pagesAlimentos limpos e impuros segundo a BíbliaWeldner CeccatoPas encore d'évaluation
- Prova - Cfs 1 2021 - Cod - 33Document28 pagesProva - Cfs 1 2021 - Cod - 33Desqueronee XesqueroneePas encore d'évaluation
- Padrão de Croche Pug DogDocument19 pagesPadrão de Croche Pug DogMaria RodriguezPas encore d'évaluation
- Rafael Luglio Guedes DEFINITIVO 3105Document68 pagesRafael Luglio Guedes DEFINITIVO 3105rafael guedesPas encore d'évaluation
- Ficha de Observação Caixa LudicaDocument4 pagesFicha de Observação Caixa LudicaAna Flavia Lisita100% (1)
- Porquinho Da ÍndiaDocument6 pagesPorquinho Da ÍndiaÉVELYN SANTOS DE OLIVEIRAPas encore d'évaluation