Vous aimerez peut-être aussi
- Cubierta Del Estadio Olímpico de AtenasDocument10 pagesCubierta Del Estadio Olímpico de AtenasBoris Manuel González GarciaPas encore d'évaluation
- Pe Reyesm Ruitonm 28-07-21 PDFDocument20 pagesPe Reyesm Ruitonm 28-07-21 PDFEdgar Alexander Ruiton MoraPas encore d'évaluation
- Organización Físico Especial de Los Centros PobladosDocument2 pagesOrganización Físico Especial de Los Centros PobladosRoy Ramos CardenasPas encore d'évaluation
- CASA HUAYOCCARI BY ELIDA TERMINADO ExpoDocument22 pagesCASA HUAYOCCARI BY ELIDA TERMINADO ExpoElizabeth MantillaPas encore d'évaluation
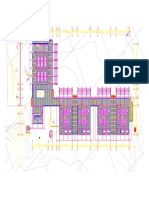
- PlanoDocument1 pagePlanoBrian Montes PinedoPas encore d'évaluation
- Arquitectura Republica y ModernaDocument6 pagesArquitectura Republica y ModernaEddy Atao RojasPas encore d'évaluation
- Memoria de Proyecto de Grado PDFDocument49 pagesMemoria de Proyecto de Grado PDFddymaque100% (1)
- Futurologia o ProspectivaDocument2 pagesFuturologia o ProspectivaEdgard Renzo VelasquezPas encore d'évaluation
- Tomo I - TesisDocument318 pagesTomo I - TesisArmando David Ramos RamosPas encore d'évaluation
- Parque IbiraueraDocument7 pagesParque IbiraueraFray Cárdenas Da SPas encore d'évaluation
- Arquitectura Religiosa Siglo XviiDocument29 pagesArquitectura Religiosa Siglo XviiRoberto JimenezPas encore d'évaluation
- PANEL Ruiz Mariana Semana 06Document1 pagePANEL Ruiz Mariana Semana 06Mariana RuizPas encore d'évaluation
- Memoria DescriptivaDocument2 pagesMemoria DescriptivaLiz Mary Ledesma SedanoPas encore d'évaluation
- Analisis de Vientos Sol LluviasDocument1 pageAnalisis de Vientos Sol LluviasHans Jaime Q JPas encore d'évaluation
- P06 - Sectorizacion Urbana PDFDocument1 pageP06 - Sectorizacion Urbana PDFNathaniell Ramos TueroconsaPas encore d'évaluation
- Bases Puertas - VentanasDocument15 pagesBases Puertas - VentanasSamyk FaefPas encore d'évaluation
- Basilica Sta SofiaDocument21 pagesBasilica Sta SofiaDanilo Yanapa SalesPas encore d'évaluation
- Estudio de LugarDocument30 pagesEstudio de LugarCamila HortenciaPas encore d'évaluation
- Documento Instituto Del Corazon Cotizacion Puerta Vidrio TemDocument3 pagesDocumento Instituto Del Corazon Cotizacion Puerta Vidrio Temjoel diazPas encore d'évaluation
- Catedral Nuestra Señora de Los AngelesDocument8 pagesCatedral Nuestra Señora de Los Angelesisabella louridoPas encore d'évaluation
- Valpara O: Habilitacion Wong Tomas MarsanoDocument94 pagesValpara O: Habilitacion Wong Tomas MarsanoEILEEN STACY PASCUAL TEJADAPas encore d'évaluation
- DS 004 2011 Vivienda PDFDocument29 pagesDS 004 2011 Vivienda PDFA Bao A QuPas encore d'évaluation
- POZUZODocument2 pagesPOZUZOManuel S FarfanPas encore d'évaluation
- Ciudad Industrial - RomaDocument6 pagesCiudad Industrial - RomaNadia Quintero GarciaPas encore d'évaluation
- Primer Lugar Concurso Plaza Mayor Y Eje Turístico Cultural Centro Histórico de HuamangaDocument16 pagesPrimer Lugar Concurso Plaza Mayor Y Eje Turístico Cultural Centro Histórico de HuamangaBeatriz Andrea Rivera LopezPas encore d'évaluation
- Informe Topografico - Parque Zonal VentanillaDocument39 pagesInforme Topografico - Parque Zonal VentanillaEdwin Arroyo GalindoPas encore d'évaluation
- Panel ReferentesDocument1 pagePanel ReferentesJonathanSneiderPas encore d'évaluation
- Ordenanza 1860 Comercio PDFDocument2 pagesOrdenanza 1860 Comercio PDFPatricia Dias VElardePas encore d'évaluation
- Bioclimatismo Presentacion para Exposicion CorregidaDocument59 pagesBioclimatismo Presentacion para Exposicion CorregidakarlasarayPas encore d'évaluation
- Memoria Descriptiva Estructuras - Museo NascaDocument6 pagesMemoria Descriptiva Estructuras - Museo NascaMaikol Jayo PachecoPas encore d'évaluation
- Historia de La Casa VelazcoDocument12 pagesHistoria de La Casa VelazcoMulti- FacetedPas encore d'évaluation
- Informe OdeonDocument11 pagesInforme OdeonSteffy AndradePas encore d'évaluation
- Declaratoria de FabricaDocument3 pagesDeclaratoria de FabricaWalter GuizadoPas encore d'évaluation
- Descripción de AcabadosDocument2 pagesDescripción de AcabadosIván SotoPas encore d'évaluation
- 324 Adecuacion Pdam FinalDocument33 pages324 Adecuacion Pdam FinalRosario Victoria Nuñez DezaPas encore d'évaluation
- Procedimiento de ClaraboyaDocument18 pagesProcedimiento de ClaraboyaYSBEL DEL VALLE VALERIO FRANCOPas encore d'évaluation
- Memoria Descriptiva de Estructuras para Un Edificio DualDocument8 pagesMemoria Descriptiva de Estructuras para Un Edificio DualLuis Antonio Paz VenegasPas encore d'évaluation
- Influencias Europeas en La Arquitectura Peruana Durante El VirreinatoDocument3 pagesInfluencias Europeas en La Arquitectura Peruana Durante El VirreinatoJean Marco Salirrosas CernaPas encore d'évaluation
- 05 Criterios de Estructuración de Edificios de AceroDocument68 pages05 Criterios de Estructuración de Edificios de AceroJhon PonchePas encore d'évaluation
- Analisis Vial de La Ciudad de HuanucoDocument8 pagesAnalisis Vial de La Ciudad de HuanucoLuis GonzalesPas encore d'évaluation
- Casa Museo Sabio Santiago Antúnez de MayoloDocument2 pagesCasa Museo Sabio Santiago Antúnez de MayoloFrancis Valverde AsenciosPas encore d'évaluation
- Agenda 21 de Las Periferias de PiuraDocument26 pagesAgenda 21 de Las Periferias de PiuraBlanca Raquel Elías YoveraPas encore d'évaluation
- La Urb. Jose Carlos MariateguiDocument31 pagesLa Urb. Jose Carlos MariateguiFrank Jair Egusquiza Lafora0% (1)
- Informe ObservacionesDocument25 pagesInforme ObservacionesCarlos FernandezPas encore d'évaluation
- Inversor Cargador MUST SOLAR 300W (10A) - 600W (20A) - 800W (25A) - 12V PDFDocument1 pageInversor Cargador MUST SOLAR 300W (10A) - 600W (20A) - 800W (25A) - 12V PDFJHEYSSON GUZMANPas encore d'évaluation
- INFORME DE LEVANTAMIENTO ARQUITECTONICO - INMUEBLE Av. MELLO FRANCO N°380Document7 pagesINFORME DE LEVANTAMIENTO ARQUITECTONICO - INMUEBLE Av. MELLO FRANCO N°380Alexis EntertainmentPas encore d'évaluation
- Inf - Tecnico Verificacion D.F.Document4 pagesInf - Tecnico Verificacion D.F.jorge zorrilla navarroPas encore d'évaluation
- 31 - Cusco Ie N 501390-Santoshari-31 - Cusco Ie #501390-SantoshariDocument1 page31 - Cusco Ie N 501390-Santoshari-31 - Cusco Ie #501390-SantoshariArturo Gomez SaldivarPas encore d'évaluation
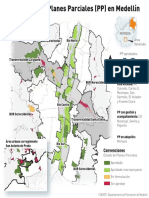
- Planes Parciales de MedellínDocument1 pagePlanes Parciales de MedellínJuan Diego Ortiz JiménezPas encore d'évaluation
- Memoria DescriptivaDocument18 pagesMemoria DescriptivacarlosPas encore d'évaluation
- Segun El RNEDocument46 pagesSegun El RNEAmiltom Retete CruzPas encore d'évaluation
- Clase 5-Cargas de GravedadDocument49 pagesClase 5-Cargas de GravedadRonyOlanoPas encore d'évaluation
- Grupo 06 - Caso Transgresion Codigo Cap - Kevin y RenzoDocument5 pagesGrupo 06 - Caso Transgresion Codigo Cap - Kevin y RenzoRenzo OmarPas encore d'évaluation
- INF. TEC. VERIF. - Milenka LoncharichDocument4 pagesINF. TEC. VERIF. - Milenka Loncharichluis alberto matto ostosPas encore d'évaluation
- Central Mayorista Dane PDFDocument8 pagesCentral Mayorista Dane PDFYOHAN STIVEN ZAPATA MURIELPas encore d'évaluation
- PLANEAMIENTODocument9 pagesPLANEAMIENTORony Alexis UriartePas encore d'évaluation
- Tradicion Planificacion UrbanaDocument19 pagesTradicion Planificacion UrbanaJorgeRiveraPas encore d'évaluation
- Expediente Tecnico CalcaDocument52 pagesExpediente Tecnico CalcaJosimar Mera SifuentesPas encore d'évaluation
- Practica2 Arq de RobotsDocument2 pagesPractica2 Arq de Robotsangel.soriagnPas encore d'évaluation
- Informe - Robotica.Document18 pagesInforme - Robotica.JhanniferPas encore d'évaluation
- Manual Struts2 EspañolDocument82 pagesManual Struts2 EspañolDany Cenas VásquezPas encore d'évaluation
- Ensayo Ing InformaticaDocument3 pagesEnsayo Ing Informaticaandres_phoenixPas encore d'évaluation
- PL PGSQLDocument12 pagesPL PGSQLAlejandro Arenas PerezPas encore d'évaluation
- JessDocument46 pagesJessandres_phoenixPas encore d'évaluation
- Java Desde CeroDocument90 pagesJava Desde CeroJhon Pichihua HPas encore d'évaluation
- Programacion en QTDocument11 pagesProgramacion en QTandres_phoenixPas encore d'évaluation
- Catalogo RedsatelDocument18 pagesCatalogo RedsatelSynthesis-group GpsPas encore d'évaluation
- Sistema SOCDocument5 pagesSistema SOCOnelia CarballoPas encore d'évaluation
- Evaluacion - Unidad 1Document2 pagesEvaluacion - Unidad 1Jaime A. Jimenez MartinezPas encore d'évaluation
- CV Mauricio JovelDocument6 pagesCV Mauricio JovelmauriciojovelPas encore d'évaluation
- Access Cuadro ComparativoDocument5 pagesAccess Cuadro ComparativoFrancisco DuránPas encore d'évaluation
- Los ProcesadoresDocument5 pagesLos ProcesadoresMariana Córdoba Holguín100% (1)
- Guía - Introducción A La RobóticaDocument14 pagesGuía - Introducción A La RobóticaEugenio Nanni100% (1)
- Cómo Cambiar Dirección MAC en Android - SolveticDocument5 pagesCómo Cambiar Dirección MAC en Android - SolveticSysygy DarlockPas encore d'évaluation
- LAB 2 Selecion y Configuracion Del SLC 5 04 ABDocument8 pagesLAB 2 Selecion y Configuracion Del SLC 5 04 ABDaniel Soncco HerreraPas encore d'évaluation
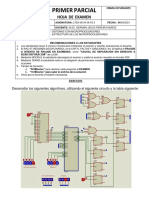
- Primer Parcial Microprocesadores I Etn TelDocument4 pagesPrimer Parcial Microprocesadores I Etn TeloscarPas encore d'évaluation
- 4 Semestre Submodulo 1b Word PDFDocument70 pages4 Semestre Submodulo 1b Word PDFVictor Alejandro Toledo SanchezPas encore d'évaluation
- Repaso de Contenidos LHW - 2022Document10 pagesRepaso de Contenidos LHW - 2022Nery YfPas encore d'évaluation
- Guia Eje 1Document22 pagesGuia Eje 1jhonatanPas encore d'évaluation
- 246-Akira vc3 Por AkiraDocument5 pages246-Akira vc3 Por Akiraapi-3754605Pas encore d'évaluation
- Anexo1 Informe Tecnico WindowsDocument18 pagesAnexo1 Informe Tecnico WindowsJhon PerezPas encore d'évaluation
- IS211 Desarrollo para Entorno Web 201702 PDFDocument5 pagesIS211 Desarrollo para Entorno Web 201702 PDFJair Alcacer OyerPas encore d'évaluation
- Ejemplos de Stored ProceduresDocument6 pagesEjemplos de Stored ProceduresJuan Alejandro Rosales Coronel0% (1)
- Programación de Puertos en CDocument14 pagesProgramación de Puertos en Cismael100% (1)
- Descargar, Configurar y Usar EmuleDocument14 pagesDescargar, Configurar y Usar EmuleInformaticaPCPas encore d'évaluation
- Manual de Usuario Grabador HD HVRDocument4 pagesManual de Usuario Grabador HD HVRJose GutierrezPas encore d'évaluation
- Practica Integradora III ParcialDocument18 pagesPractica Integradora III ParcialAlicia RodriguezPas encore d'évaluation
- Manual EndianDocument30 pagesManual EndiancynthiaPas encore d'évaluation
- Tauret ComputadoresDocument2 pagesTauret ComputadoresDario Andres Acosta DazaPas encore d'évaluation
- Gui MatlabDocument6 pagesGui MatlabEndry Rodriguez ParedesPas encore d'évaluation
- Acta de Entrega de Hardware y Software - LAPTOPDocument2 pagesActa de Entrega de Hardware y Software - LAPTOPMarvin Vasquez100% (2)
- Prefijos C#Document3 pagesPrefijos C#Reynaldo VillalonaPas encore d'évaluation
- 15 Preguntas Tipo Test Del Punto 2Document2 pages15 Preguntas Tipo Test Del Punto 2Christian Fragoso YáñezPas encore d'évaluation
- Actividad 7,8 Y 9.: Informatica Volumen 1Document12 pagesActividad 7,8 Y 9.: Informatica Volumen 1Villana ErikaPas encore d'évaluation
- Caso de Estudio ResueltoDocument3 pagesCaso de Estudio Resueltoerick fuentesPas encore d'évaluation
- Evaluacion Final - Escenario 8 - Pruebas y Calidad de Softwareb02)Document13 pagesEvaluacion Final - Escenario 8 - Pruebas y Calidad de Softwareb02)jose pardoPas encore d'évaluation