Vous aimerez peut-être aussi
- Call For Papers - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Papers - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- A Comparative Study of Text Comprehension in IELTS Reading Exam Using GPT-3Document8 pagesA Comparative Study of Text Comprehension in IELTS Reading Exam Using GPT-3Anonymous Gl4IRRjzNPas encore d'évaluation
- Call For Papers - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Papers - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- From Clicks To Security: Investigating Continuous Authentication Via Mouse DynamicsDocument16 pagesFrom Clicks To Security: Investigating Continuous Authentication Via Mouse DynamicsAnonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- IoT Security: Penetration Testing of White-Label Cloud-Based IoT Camera Compromising Personal Data PrivacyDocument12 pagesIoT Security: Penetration Testing of White-Label Cloud-Based IoT Camera Compromising Personal Data PrivacyAnonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Variations in Outcome For The Same Map Reduce Transitive Closure Algorithm Implemented On Different Hadoop PlatformsDocument8 pagesVariations in Outcome For The Same Map Reduce Transitive Closure Algorithm Implemented On Different Hadoop PlatformsAnonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- XML Encryption and Signature For Securing Web ServicesDocument14 pagesXML Encryption and Signature For Securing Web ServicesAnonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Comparison of Rendering Processes On 3D ModelDocument10 pagesComparison of Rendering Processes On 3D ModelAnonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Determining Business Intelligence Usage SuccessDocument23 pagesDetermining Business Intelligence Usage SuccessAnonymous Gl4IRRjzNPas encore d'évaluation
- Machine Learning in Early Genetic Detection of Multiple Sclerosis Disease: A SurveyDocument18 pagesMachine Learning in Early Genetic Detection of Multiple Sclerosis Disease: A SurveyAnonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Secure Arcade: A Gamified Defense Against Cyber AttacksDocument17 pagesSecure Arcade: A Gamified Defense Against Cyber AttacksAnonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- A New Approach For Ranking Shadowed Fuzzy Numbers and Its ApplicationDocument16 pagesA New Approach For Ranking Shadowed Fuzzy Numbers and Its ApplicationAnonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Call For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesCall For Articles - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5782)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Answer Following Questions: TH THDocument5 pagesAnswer Following Questions: TH THravi3754Pas encore d'évaluation
- ServiceNow Certified System Administrator CSA Practice Test Set 2Document76 pagesServiceNow Certified System Administrator CSA Practice Test Set 2Apoorv DiwanPas encore d'évaluation
- Assignment IDocument4 pagesAssignment IDylan HsiehPas encore d'évaluation
- Law Movie Analysis Erin BrockovichDocument3 pagesLaw Movie Analysis Erin Brockovichshaju0% (3)
- NTFS File System Report with 25244 FilesDocument1 064 pagesNTFS File System Report with 25244 FilesAdenillson PeruannoPas encore d'évaluation
- Assertive CommunicationDocument5 pagesAssertive CommunicationAditi VaidPas encore d'évaluation
- CSR FinalDocument44 pagesCSR FinalrohanPas encore d'évaluation
- TEC Services, Inc.: Thermal Aerosol Generator, Model Compact (Inert Gas)Document1 pageTEC Services, Inc.: Thermal Aerosol Generator, Model Compact (Inert Gas)S DasPas encore d'évaluation
- Importance of Bus Rapid Transit Systems (BRTSDocument7 pagesImportance of Bus Rapid Transit Systems (BRTSAnshuman SharmaPas encore d'évaluation
- 390D L Excavator WAP00001-UP (MACHINE) POWERED BY C18 Engine (SEBP5236 - 43) - Sistemas y ComponentesDocument3 pages390D L Excavator WAP00001-UP (MACHINE) POWERED BY C18 Engine (SEBP5236 - 43) - Sistemas y ComponentesJuan Pablo Virreyra TriguerosPas encore d'évaluation
- Different Types of AstrologyDocument16 pagesDifferent Types of AstrologyastrologerrajeevjiPas encore d'évaluation
- Ministry of Fisheries Report Into Hoki FisheriesDocument141 pagesMinistry of Fisheries Report Into Hoki FisheriesNewshubPas encore d'évaluation
- List of Computer Science Impact Factor Journals: Indexed in ISI Web of Knowledge 2015Document7 pagesList of Computer Science Impact Factor Journals: Indexed in ISI Web of Knowledge 2015ppghoshinPas encore d'évaluation
- Thursday Forenoon: Instant Examinations - June - 2018Document6 pagesThursday Forenoon: Instant Examinations - June - 2018Gurusamy GuruPas encore d'évaluation
- CargadoresDocument3 pagesCargadoresAmber SmithPas encore d'évaluation
- Cost Estimation and Cost Allocation 3Document55 pagesCost Estimation and Cost Allocation 3Uday PandeyPas encore d'évaluation
- Karlle Louis P. Obviar - S11-04Document2 pagesKarlle Louis P. Obviar - S11-04Karlle ObviarPas encore d'évaluation
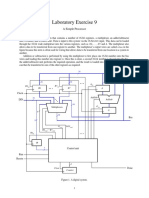
- Laboratory Exercise 9: A Simple ProcessorDocument8 pagesLaboratory Exercise 9: A Simple ProcessorhxchPas encore d'évaluation
- Listening Test 2 BACH 3 Eva 19-20Document2 pagesListening Test 2 BACH 3 Eva 19-20Maria Jose Fuentes DiazPas encore d'évaluation
- AP School Education Rules SummaryDocument17 pagesAP School Education Rules SummaryThirupathaiahPas encore d'évaluation
- CAM/CIM Process and NC Part Programming FundamentalsDocument16 pagesCAM/CIM Process and NC Part Programming FundamentalsRakhi Mol BVPas encore d'évaluation
- SSC CGL 2021 Mains Maths (En) PaperDocument35 pagesSSC CGL 2021 Mains Maths (En) PaperSachin BhatiPas encore d'évaluation
- NSO Class 6 Sample Paper 2019 20Document3 pagesNSO Class 6 Sample Paper 2019 20NitinPas encore d'évaluation
- Four Big Secrets of A Happy FamilyDocument67 pagesFour Big Secrets of A Happy FamilySannie RemotinPas encore d'évaluation
- Multimodal Advocacy Campaign: Clarity of Videos and SoundsDocument3 pagesMultimodal Advocacy Campaign: Clarity of Videos and SoundsSwin EscobarPas encore d'évaluation
- Vanguardia's Online Review Program: Genito-Urinary Tract FunctionDocument8 pagesVanguardia's Online Review Program: Genito-Urinary Tract FunctionBobet ReñaPas encore d'évaluation
- Interest SwapsDocument6 pagesInterest SwapsamiPas encore d'évaluation
- Disbursements Transactions PDFDocument6 pagesDisbursements Transactions PDFMarlyn Joy YaconPas encore d'évaluation
- 2 U4 TrigpracticeDocument2 pages2 U4 Trigpracticeapi-292718088Pas encore d'évaluation
- Form Initial AssessmentDocument2 pagesForm Initial Assessmentari andiPas encore d'évaluation