Vous aimerez peut-être aussi
- Série Des ExercicesDocument5 pagesSérie Des ExercicesInteg StiPas encore d'évaluation
- Arduino | Pas à pas: Le guide ultime du débutantD'EverandArduino | Pas à pas: Le guide ultime du débutantPas encore d'évaluation
- Énoncés Des SujetsDocument17 pagesÉnoncés Des SujetsTarek Mehdid100% (2)
- TD Supervision CorrigéDocument10 pagesTD Supervision CorrigéSana GassémPas encore d'évaluation
- Objectifs: - Systèmes Logiques - Capteurs-Actionneurs - Programmation Des APIDocument3 pagesObjectifs: - Systèmes Logiques - Capteurs-Actionneurs - Programmation Des APIRefka Kaabi100% (1)
- TP1 automatismeLAIIDocument3 pagesTP1 automatismeLAIIfakhri menjliPas encore d'évaluation
- Automatisme - L3-Eai-Elm - Exercices D'introduction Au GrafcetDocument4 pagesAutomatisme - L3-Eai-Elm - Exercices D'introduction Au GrafcetKing CyrusPas encore d'évaluation
- Exercices Grafcet - RevisionDocument17 pagesExercices Grafcet - RevisionMohamed LarbiPas encore d'évaluation
- TD1 Automatisme - GRAFCETDocument11 pagesTD1 Automatisme - GRAFCETFadila FE100% (2)
- Variateurs de Vitesse - MAS2Document10 pagesVariateurs de Vitesse - MAS2Fotcha EricPas encore d'évaluation
- 6 GemmaDocument5 pages6 GemmaSerge RINAUDOPas encore d'évaluation
- Perc AutoDocument4 pagesPerc Autoyaccine100% (1)
- 6 TP Barierre ParkingDocument37 pages6 TP Barierre Parkingamine100% (1)
- TD 2 Automates Programmables Industriels 2020 - 2021Document2 pagesTD 2 Automates Programmables Industriels 2020 - 2021adamPas encore d'évaluation
- TP3 Commande Ascenceur Avec IHM WinCCDocument86 pagesTP3 Commande Ascenceur Avec IHM WinCCHiba Toune0% (1)
- Api1 PDFDocument87 pagesApi1 PDFAbdelhadi Ennajih75% (4)
- TD2 Sur Chapitre 2. Le GrafcetDocument7 pagesTD2 Sur Chapitre 2. Le GrafcetMa Jhoul0% (1)
- DC Automatisme 2020 Et CorrigéDocument5 pagesDC Automatisme 2020 Et CorrigéIslemePas encore d'évaluation
- TP Automate ProgrammableDocument8 pagesTP Automate ProgrammableSamba SallPas encore d'évaluation
- TD Grafcet PDFDocument10 pagesTD Grafcet PDFlahssane hmidatPas encore d'évaluation
- EXAMENAutomatismeDocument1 pageEXAMENAutomatismegringo yeso100% (1)
- Exercice 1 Grafcet-ApiDocument3 pagesExercice 1 Grafcet-ApiOussama OussamaPas encore d'évaluation
- TD Api05022019Document10 pagesTD Api05022019Mohamed FathallahPas encore d'évaluation
- Chapitre 3 - AutomatismeDocument9 pagesChapitre 3 - Automatismesaaadi aymenPas encore d'évaluation
- Exercice Chariots PDFDocument2 pagesExercice Chariots PDFAhmed Bnzi100% (1)
- Le Grafcet Exercices CorrigesDocument2 pagesLe Grafcet Exercices CorrigesAmir Na Dz100% (2)
- TD1 API Electromecanique4Document3 pagesTD1 API Electromecanique4Ahmed Ben MustaphaPas encore d'évaluation
- Eps Ii 1Document12 pagesEps Ii 1Albertø Là VïtëssëPas encore d'évaluation
- TSX21Document5 pagesTSX21Leroy Lionel Sonfack100% (2)
- TD GrafcetDocument10 pagesTD GrafcetBOUALAOUIPas encore d'évaluation
- Exercice 1: Déplacement D'un Wagonnet: Savoir M303 Commande Des Machines Par API Activité: TD TD: GrafcetDocument4 pagesExercice 1: Déplacement D'un Wagonnet: Savoir M303 Commande Des Machines Par API Activité: TD TD: GrafcetAbdelhadi AZPas encore d'évaluation
- Exercice 1 Grafcet-Api PDFDocument3 pagesExercice 1 Grafcet-Api PDFMouhcine Zianee100% (1)
- GE-T.LANTRI-Automates Programmables Industriels (API) - TP5 - API - L3 - AUTO-L3-S6Document2 pagesGE-T.LANTRI-Automates Programmables Industriels (API) - TP5 - API - L3 - AUTO-L3-S6Rabah Amidi100% (1)
- TD3 - Automatisme IndustrielDocument7 pagesTD3 - Automatisme IndustrielFifi La MarionnettePas encore d'évaluation
- TP1 Prise en Main de AutomgenDocument13 pagesTP1 Prise en Main de AutomgenMarouan ChanPas encore d'évaluation
- Automatismes IndustrielsDocument42 pagesAutomatismes IndustrielsWiame Bouyoussef100% (1)
- Initiation 3 TIA Portal MS1Document31 pagesInitiation 3 TIA Portal MS1Chakib AutomationPas encore d'évaluation
- TD3processus Industriel MoodleDocument5 pagesTD3processus Industriel Moodlelamis rezkiPas encore d'évaluation
- TD N2 LadderDocument3 pagesTD N2 Ladderghassen Ben hlima100% (1)
- Travaux PratiquesDocument2 pagesTravaux PratiquesFatima Zahra AmalouPas encore d'évaluation
- Compte Rendu Automatisme Systéme Monte ChargeDocument12 pagesCompte Rendu Automatisme Systéme Monte ChargeBilel BoulehmiPas encore d'évaluation
- Poly TD API PDFDocument10 pagesPoly TD API PDFKhadija HajadePas encore d'évaluation
- GRAFCET D'un Point de Vue PCDocument3 pagesGRAFCET D'un Point de Vue PCkhocine50% (2)
- Cours 12 Exemples Grafcet Et GEMMADocument7 pagesCours 12 Exemples Grafcet Et GEMMAimen mehri100% (3)
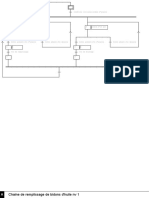
- EX 3 - Chaine de Remplissage de Bidons D'huile NV 1 & NV 2 - FusionnéDocument3 pagesEX 3 - Chaine de Remplissage de Bidons D'huile NV 1 & NV 2 - FusionnéMounaim Matini100% (1)
- Chap2 HacheursDocument38 pagesChap2 Hacheursmoez youssefPas encore d'évaluation
- Devoir de Synthèse N°1Document2 pagesDevoir de Synthèse N°1Ochi Chaima100% (1)
- API - Cours RésuméDocument32 pagesAPI - Cours RésuméalmahfoudelfadiliPas encore d'évaluation
- ESA - TP FFs - Juin'10Document122 pagesESA - TP FFs - Juin'10mustapha bougharioun100% (1)
- TP N°1 - Prise en Main de L'environnement APIDocument5 pagesTP N°1 - Prise en Main de L'environnement APIlange681Pas encore d'évaluation
- 1-Principe de Programmation LadderDocument14 pages1-Principe de Programmation LadderkAMELPas encore d'évaluation
- 01 - Systeme de Lavage Automatique de Vehicules - (DT)Document5 pages01 - Systeme de Lavage Automatique de Vehicules - (DT)salem jomaaPas encore d'évaluation
- SiemensDocument13 pagesSiemensanisonfirePas encore d'évaluation
- AutomatismeDocument13 pagesAutomatismeAurelien Christ L'ange100% (1)
- Chap VHDL Machine A EtatDocument32 pagesChap VHDL Machine A EtatAbdo Ait JaPas encore d'évaluation
- LadderDocument1 pageLadderMounir Hadrich0% (1)
- Fascicule TP SEDDocument35 pagesFascicule TP SEDAkram Del Rio100% (1)
- Cours - Génie Électrique API - Bac Technique (2012-2013) MR Aïssa PDFDocument12 pagesCours - Génie Électrique API - Bac Technique (2012-2013) MR Aïssa PDFYessineKammounPas encore d'évaluation
- Mini Projet - AUTO-maalej PDFDocument8 pagesMini Projet - AUTO-maalej PDFSarah SfaxiPas encore d'évaluation
- Labview tp2Document36 pagesLabview tp2Mouni TadjerPas encore d'évaluation
- Intelligence Artificielle Ou Automatisme Infaillible ?: Du Langage Au Big DataDocument4 pagesIntelligence Artificielle Ou Automatisme Infaillible ?: Du Langage Au Big DataMouni TadjerPas encore d'évaluation
- Chapitre VI - DIAGDocument3 pagesChapitre VI - DIAGMouni TadjerPas encore d'évaluation
- Chapitre V - DIAGDocument11 pagesChapitre V - DIAGMouni TadjerPas encore d'évaluation
- Intelligence Artificielle Ou Automatisme Infaillible ?: Du Langage Au Big DataDocument4 pagesIntelligence Artificielle Ou Automatisme Infaillible ?: Du Langage Au Big DataMouni TadjerPas encore d'évaluation
- Hassclic 893Document80 pagesHassclic 893Mouni TadjerPas encore d'évaluation
- Hassclic 893Document80 pagesHassclic 893Mouni TadjerPas encore d'évaluation
- Le Grafcet Exercices Corriges PDFDocument2 pagesLe Grafcet Exercices Corriges PDFousmane100% (11)
- PDFDocument34 pagesPDFkjjPas encore d'évaluation
- Chapitre 6: Le Grafcet: (Graphe Fonctionnel de Commande Etape-Transition)Document35 pagesChapitre 6: Le Grafcet: (Graphe Fonctionnel de Commande Etape-Transition)mahmoud bensassiPas encore d'évaluation
- Graf CetDocument43 pagesGraf Cetjij le grandPas encore d'évaluation
- TD 3 CorrigeDocument5 pagesTD 3 CorrigeVivo Vivoo VIPas encore d'évaluation
- Comment Recadrer Une PhotoDocument4 pagesComment Recadrer Une PhotoDupirePas encore d'évaluation
- ETUDE DE CAS NOVATECH 2023 20240122 0001Document8 pagesETUDE DE CAS NOVATECH 2023 20240122 0001ineschrproPas encore d'évaluation
- Facture 9086073990 2023-01-31Document2 pagesFacture 9086073990 2023-01-31Sidgie DenisPas encore d'évaluation
- Exercices Page JSPDocument18 pagesExercices Page JSPOuled OuledelhajPas encore d'évaluation
- TP 4: Réseaux Locaux Virtuels Configurations Des Routeurs Sans-FilDocument7 pagesTP 4: Réseaux Locaux Virtuels Configurations Des Routeurs Sans-FilMinou LuchianoPas encore d'évaluation
- Cours Bureau TiqueDocument16 pagesCours Bureau TiqueAlaoui AminePas encore d'évaluation
- Le Principal Outil NIDSDocument6 pagesLe Principal Outil NIDSMaster kabondoPas encore d'évaluation
- SYMFR 39542 ManuelOutilDiagSymDocument36 pagesSYMFR 39542 ManuelOutilDiagSymrigalPas encore d'évaluation
- MySQL Stored ProceduresDocument24 pagesMySQL Stored ProceduresĶäďiřØo KtrPas encore d'évaluation
- Maitrisez La 2d Avec Photoshop PDFDocument85 pagesMaitrisez La 2d Avec Photoshop PDFamarPas encore d'évaluation
- Mathworks 2019b SommaireDocument10 pagesMathworks 2019b SommairecointoinPas encore d'évaluation
- Lab For IsisDocument12 pagesLab For IsisMohamedElbzibziPas encore d'évaluation
- Thème 3: Logique Sequentielle: Compteurs/décompteurs Intégrés 74192 - 74193Document4 pagesThème 3: Logique Sequentielle: Compteurs/décompteurs Intégrés 74192 - 74193amerjlali456Pas encore d'évaluation
- Guide D'utilisation Gestion Du Flux 1ere PartieDocument35 pagesGuide D'utilisation Gestion Du Flux 1ere Partiefayssal zeltni100% (1)
- Wijda NeDocument35 pagesWijda Neghada el idirissiPas encore d'évaluation
- Cours Enseirb GL A2 Module1Document39 pagesCours Enseirb GL A2 Module1Hicham ZghariPas encore d'évaluation
- 3INFO1 - Fiches ElevesDocument4 pages3INFO1 - Fiches ElevesRoronoa Zoro100% (1)
- Filtrage de Kalman Application en TrajectographieDocument58 pagesFiltrage de Kalman Application en Trajectographielaila EL MEKNOUNIPas encore d'évaluation
- Questions Réponses PDFDocument346 pagesQuestions Réponses PDFHamza Mezar100% (1)
- Cours TCP Ip GeetDocument61 pagesCours TCP Ip GeetIkramPas encore d'évaluation
- Lettre de Motivation ClermontDocument2 pagesLettre de Motivation Clermontiheb bouarichePas encore d'évaluation
- PXM20Document8 pagesPXM20Simon CLEMENT SCSPas encore d'évaluation
- Cloud Computing Et Securite Approches Et SolutionsDocument5 pagesCloud Computing Et Securite Approches Et SolutionsDjadjaPas encore d'évaluation
- DWWM V2 Epsionline PDFDocument2 pagesDWWM V2 Epsionline PDFJunior OliveiraPas encore d'évaluation
- Consignes D'utilisation Et de Réglage 3.4.4: Fonctions de Système 3.4 PerturbographieDocument1 pageConsignes D'utilisation Et de Réglage 3.4.4: Fonctions de Système 3.4 Perturbographieangemohamed76Pas encore d'évaluation
- Smart Maintenance 786427Document18 pagesSmart Maintenance 786427Abdellah El BarkanyPas encore d'évaluation
- TD1 Ing2 RoutRes 2022-2023Document4 pagesTD1 Ing2 RoutRes 2022-2023Oumayma LimemePas encore d'évaluation
- Corrige TD1 SMI S5Document12 pagesCorrige TD1 SMI S5bbbPas encore d'évaluation
- Genie LogicielDocument11 pagesGenie Logicielnourchene saidiPas encore d'évaluation
- Blockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondeD'EverandBlockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondePas encore d'évaluation
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Python pour les hackers : Le guide des script kiddies : apprenez à créer vos propres outils de hackingD'EverandPython pour les hackers : Le guide des script kiddies : apprenez à créer vos propres outils de hackingÉvaluation : 5 sur 5 étoiles5/5 (1)
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationD'EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationPas encore d'évaluation
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- 101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerD'Everand101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- La communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseD'EverandLa communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseÉvaluation : 5 sur 5 étoiles5/5 (1)
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 5 sur 5 étoiles5/5 (2)
- Marketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxD'EverandMarketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxPas encore d'évaluation
- Dictionnaire politique d'internet et du numérique: Les cent enjeux de la société numériqueD'EverandDictionnaire politique d'internet et du numérique: Les cent enjeux de la société numériqueÉvaluation : 3 sur 5 étoiles3/5 (1)
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Kali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.D'EverandKali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.Évaluation : 5 sur 5 étoiles5/5 (1)
- Bien débuter avec JavaScript: Formation professionnelleD'EverandBien débuter avec JavaScript: Formation professionnellePas encore d'évaluation
- Réseau Anonyme Tor 101: Une Introduction à la Partie la Plus Privée de l'InternetD'EverandRéseau Anonyme Tor 101: Une Introduction à la Partie la Plus Privée de l'InternetÉvaluation : 2 sur 5 étoiles2/5 (2)
- Le plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentD'EverandLe plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentPas encore d'évaluation
- L'Intelligence Artificielle: Quels enjeux sociétaux ? Quels impacts annoncés sur la gouvernance des entreprises ?D'EverandL'Intelligence Artificielle: Quels enjeux sociétaux ? Quels impacts annoncés sur la gouvernance des entreprises ?Évaluation : 3 sur 5 étoiles3/5 (1)
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Maison Intelligente: Conception et réalisation d'une maison intelligenteD'EverandMaison Intelligente: Conception et réalisation d'une maison intelligenteÉvaluation : 4 sur 5 étoiles4/5 (5)