Vous aimerez peut-être aussi
- Performance économique des politiques publiques: Évaluation des coûts-avantages et analyse d'impacts contrefactuelsD'EverandPerformance économique des politiques publiques: Évaluation des coûts-avantages et analyse d'impacts contrefactuelsPas encore d'évaluation
- 1-ED587-Méthodes-d’apprentissage-automatique-appliquées-à-la-Linguet_Zermani_2020Document6 pages1-ED587-Méthodes-d’apprentissage-automatique-appliquées-à-la-Linguet_Zermani_2020LindaPas encore d'évaluation
- Lectra LabriDocument2 pagesLectra LabriabdellahPas encore d'évaluation
- Maîtriser le Développement Full Stack : Du Front-End Éblouissant au Back-End RobusteD'EverandMaîtriser le Développement Full Stack : Du Front-End Éblouissant au Back-End RobustePas encore d'évaluation
- Guide Complet de La Maintenance PrédictiveDocument1 pageGuide Complet de La Maintenance PrédictiveWalid HamriyaPas encore d'évaluation
- Developing Cost Estimates for Environmental Remediation ProjectsD'EverandDeveloping Cost Estimates for Environmental Remediation ProjectsPas encore d'évaluation
- Article CFM Steve NGOUFACKDocument10 pagesArticle CFM Steve NGOUFACKAbdelkader RabahPas encore d'évaluation
- Méthodes de planification en transport: Deuxième éditionD'EverandMéthodes de planification en transport: Deuxième éditionPas encore d'évaluation
- haytham (1) (2)Document31 pageshaytham (1) (2)elgamounyoussefPas encore d'évaluation
- 2014PA112311 AnnexeDocument28 pages2014PA112311 AnnexeOusama FerjeniPas encore d'évaluation
- Cours Diagnostic1Document19 pagesCours Diagnostic1BilelPas encore d'évaluation
- Exercices Avec SolutionsDocument60 pagesExercices Avec Solutionsnadjem menaceur100% (1)
- SSRN-id2891006 - CopieDocument45 pagesSSRN-id2891006 - CopieOumaima ElPas encore d'évaluation
- Publi Test PDFDocument6 pagesPubli Test PDFousalhPas encore d'évaluation
- Gestion Des Informations Relatives Aux Elèves DDocument56 pagesGestion Des Informations Relatives Aux Elèves DKavé KaramokoPas encore d'évaluation
- Fiche TD - 2 - EtidiantsDocument4 pagesFiche TD - 2 - EtidiantsIdern EinPas encore d'évaluation
- ZabbixDocument56 pagesZabbixtambori100% (3)
- These Doctorat BenaichaDocument117 pagesThese Doctorat Benaichaanass anasPas encore d'évaluation
- Section 9Document22 pagesSection 9Ykip ZenxPas encore d'évaluation
- Methodologie MCSE2Document620 pagesMethodologie MCSE2elsinkior100% (1)
- SSRN Id2891006Document45 pagesSSRN Id2891006Achraf DahechPas encore d'évaluation
- 2019 CFM Papier HotaitDocument9 pages2019 CFM Papier HotaitAB SyrinaPas encore d'évaluation
- Econometrie Des Donnees de Panel PDFDocument46 pagesEconometrie Des Donnees de Panel PDFKhaled AmriPas encore d'évaluation
- These Walid 2011Document155 pagesThese Walid 2011Mohamed OmarPas encore d'évaluation
- Cours - Démarche de Diagnostic - ProfDocument6 pagesCours - Démarche de Diagnostic - ProfOlivier FLOHRPas encore d'évaluation
- Cours de MERISEDocument208 pagesCours de MERISEFouad Mysterieux100% (2)
- Planification D'un Reseau 4G PDFDocument150 pagesPlanification D'un Reseau 4G PDFtounsimed100% (2)
- 2-Fr Sipina Cost SensitiveDocument18 pages2-Fr Sipina Cost SensitiveSoleil SucréPas encore d'évaluation
- Support SASDocument82 pagesSupport SASZie KonePas encore d'évaluation
- ENM850 20231 PlanDocument5 pagesENM850 20231 PlanAlex AlexPas encore d'évaluation
- Simulation COURSDocument19 pagesSimulation COURSHadjer zitPas encore d'évaluation
- DiagnosticDocument99 pagesDiagnosticcs.makePas encore d'évaluation
- NCP Mci 6.5 FinalDocument4 pagesNCP Mci 6.5 Finalhamdi.hasnaouiPas encore d'évaluation
- GE2 S4 Système Commande Temps Réel Part1 CM PDFDocument11 pagesGE2 S4 Système Commande Temps Réel Part1 CM PDFEl GhafraouiPas encore d'évaluation
- Gestion StatisqueDocument8 pagesGestion StatisqueLePrincePas encore d'évaluation
- Epfl TH3520Document183 pagesEpfl TH3520Magraoui AbdelkadirPas encore d'évaluation
- Methodologie Depannage CSIC 05fev2009Document11 pagesMethodologie Depannage CSIC 05fev2009klan clashPas encore d'évaluation
- Rapport Hicham BelhadaouiDocument171 pagesRapport Hicham BelhadaouiYoussef AssouiPas encore d'évaluation
- Maint7 V5Document8 pagesMaint7 V5Ashraf FarahPas encore d'évaluation
- Acv FinalDocument9 pagesAcv Finalaman.niamkey19Pas encore d'évaluation
- Rapport ECC Template 12Document7 pagesRapport ECC Template 12فرحة كمالPas encore d'évaluation
- Utilisation de La Méthode FDI Pour La Localisation de Défauts de Fonctionnement D'un Processus Non LinéaireDocument7 pagesUtilisation de La Méthode FDI Pour La Localisation de Défauts de Fonctionnement D'un Processus Non LinéairebobzooPas encore d'évaluation
- TSES 23 (2)Document74 pagesTSES 23 (2)Marwa LitePas encore d'évaluation
- APznzaahOLeMI2KTJc2BZ8PzV1qKFyUlHqpIIFNpFP5-eYyChj5CAx0fU6FNtbJyjjMGtDPGWyhvGHvRO1ynkxR7JCue9fQVklzm2HI5xxfAfl6tYBODa83HYhzLClL RbKikL1fWFxNlUkmIjMrSURQuDjjHwMNGpYHJlUo3wlLAeuhe4uzrUa8P0JupEoMCyUDDocument27 pagesAPznzaahOLeMI2KTJc2BZ8PzV1qKFyUlHqpIIFNpFP5-eYyChj5CAx0fU6FNtbJyjjMGtDPGWyhvGHvRO1ynkxR7JCue9fQVklzm2HI5xxfAfl6tYBODa83HYhzLClL RbKikL1fWFxNlUkmIjMrSURQuDjjHwMNGpYHJlUo3wlLAeuhe4uzrUa8P0JupEoMCyUDGhassen OrfPas encore d'évaluation
- These DebiollesDocument173 pagesThese DebiollesterrePas encore d'évaluation
- 2010 LTN Ayadi Optimisation Par Algorithme Genetique de La MaintenanceDocument10 pages2010 LTN Ayadi Optimisation Par Algorithme Genetique de La MaintenanceyassinebouazziPas encore d'évaluation
- PrDALIMI 23-24 ENSAM-Rabat FI-GMQE S3 M22 E1 Cours-Magistral Présentation Présentiel Séance06 Chapitre05-DernierDocument64 pagesPrDALIMI 23-24 ENSAM-Rabat FI-GMQE S3 M22 E1 Cours-Magistral Présentation Présentiel Séance06 Chapitre05-Dernierzouithanae2002Pas encore d'évaluation
- Cours de SimulationDocument56 pagesCours de SimulationMarttyMcFly100% (2)
- Situation E4 Supervision Eon-NagiosDocument2 pagesSituation E4 Supervision Eon-Nagiosapi-306414104Pas encore d'évaluation
- Broyage 2Document147 pagesBroyage 2Mounia BELAIDPas encore d'évaluation
- Outil D'aide À La MceDocument10 pagesOutil D'aide À La MceTECHNOLOGIES MODERNES DU CAMEROUNPas encore d'évaluation
- COMPAS2017_Lorentz_Lefevre_FedakDocument9 pagesCOMPAS2017_Lorentz_Lefevre_FedakAymen RHOUMAPas encore d'évaluation
- GUIZANI 2016 DiffusionDocument161 pagesGUIZANI 2016 Diffusionfahd ghabiPas encore d'évaluation
- DoctoDocument5 pagesDoctoHASSAN OUMANSOURPas encore d'évaluation
- 222978292 (1)Document18 pages222978292 (1)Alioune LyPas encore d'évaluation
- 2011 GermineSeideDocument151 pages2011 GermineSeidefiniavanarakotoariveloPas encore d'évaluation
- Ba LacingDocument148 pagesBa LacingAsma ChikhaouiPas encore d'évaluation
- Maintenance Prédictive, Solution de L'industrie 4.0Document15 pagesMaintenance Prédictive, Solution de L'industrie 4.0DON AYUPOPas encore d'évaluation
- 2016 EdwinBourgetDocument83 pages2016 EdwinBourgetFkaier AlaeddinePas encore d'évaluation
- Soufiane MAOUCHE Ahmed Oussama BakoucheDocument97 pagesSoufiane MAOUCHE Ahmed Oussama BakoucheMo BaLaPas encore d'évaluation
- These UTC Zahra KhawajaDocument132 pagesThese UTC Zahra KhawajaMo BaLaPas encore d'évaluation
- RS485Document16 pagesRS485Mo BaLaPas encore d'évaluation
- Master GE TD: Exercice 1Document2 pagesMaster GE TD: Exercice 1ZakariaPas encore d'évaluation
- Les Réseaux CAN - CAN-open (Controller Area Network) : Hachem El Yousfi Alaoui Enset - Um5 RabatDocument24 pagesLes Réseaux CAN - CAN-open (Controller Area Network) : Hachem El Yousfi Alaoui Enset - Um5 RabatMo BaLaPas encore d'évaluation
- CCDocument9 pagesCCMo BaLaPas encore d'évaluation
- Système de Reconnaissance Automatique Des Plaques D'immatriculation MarocaineDocument27 pagesSystème de Reconnaissance Automatique Des Plaques D'immatriculation MarocaineEl Ouaarabi Mohamed33% (3)
- Wireless Sensors NetworksDocument19 pagesWireless Sensors NetworkswissemPas encore d'évaluation
- Commande en Vitesse Par Placement de Pôles D'un Moteur À CCDocument56 pagesCommande en Vitesse Par Placement de Pôles D'un Moteur À CCam nouha100% (1)
- EvolRE B5 PDFDocument860 pagesEvolRE B5 PDFSandiPas encore d'évaluation
- Examen Variateurs 2 Juillet 2021Document16 pagesExamen Variateurs 2 Juillet 2021Mo BaLaPas encore d'évaluation
- T.Img Python C JAvaDocument22 pagesT.Img Python C JAvaismailPas encore d'évaluation
- Methode CayleyHamiltonDocument2 pagesMethode CayleyHamiltonMo BaLaPas encore d'évaluation
- L'utilisation Clinique Des Minis VisDocument133 pagesL'utilisation Clinique Des Minis VisAmira MansourkhodjaPas encore d'évaluation
- 5 - Business ModeleDocument5 pages5 - Business ModeleBassma AzarhounPas encore d'évaluation
- Universite D'Antananarivo: Departement Bâtiment Et Travaux PublicsDocument284 pagesUniversite D'Antananarivo: Departement Bâtiment Et Travaux PublicsIlias ElmaaloumPas encore d'évaluation
- Teyliom Group RecruteDocument1 pageTeyliom Group RecruteHassane AmadouPas encore d'évaluation
- CH Org TD 9Document6 pagesCH Org TD 9Jean omer KonePas encore d'évaluation
- Chap 1 GéolocalisationDocument13 pagesChap 1 GéolocalisationGabin Kenny de Manuel TRIGOPas encore d'évaluation
- 322 05232011Document32 pages322 05232011elmoudjahid_dzPas encore d'évaluation
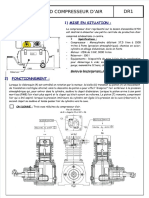
- TD Compresseur e PDFDocument8 pagesTD Compresseur e PDFntab100% (1)
- FD 13-4Document11 pagesFD 13-4olympioPas encore d'évaluation
- El Watan Du 21.07.2013Document22 pagesEl Watan Du 21.07.2013nacer_2Pas encore d'évaluation
- 8 Réalisation Des Activités OpérationnellesDocument33 pages8 Réalisation Des Activités OpérationnellesKarim DjeffalPas encore d'évaluation
- Revue MarschDocument73 pagesRevue MarschTens AiepPas encore d'évaluation
- Poutres en BA Ou BPDocument10 pagesPoutres en BA Ou BPCastiglianoPas encore d'évaluation
- Python Pour Les NulsDocument549 pagesPython Pour Les NulsBelhamidi Mohammed Houssame88% (16)
- Rapport - Raphael PION - ALCASAR V3Document39 pagesRapport - Raphael PION - ALCASAR V3Ghofrane FerchichiPas encore d'évaluation
- AL-prétirés DDMDocument14 pagesAL-prétirés DDMGiacomo AngeliniPas encore d'évaluation
- CGL 2016 Anglais Rapport de JuryDocument5 pagesCGL 2016 Anglais Rapport de JurySaeclusPas encore d'évaluation
- Projection Du Secteur RéelDocument24 pagesProjection Du Secteur RéelAbdoulaye NdongPas encore d'évaluation
- Charpente MétaliqueDocument9 pagesCharpente MétaliqueH-a HichemPas encore d'évaluation
- Tpcourscc2 Cor 0910Document2 pagesTpcourscc2 Cor 0910Nacir DaikhPas encore d'évaluation
- Matlab Octave Cours JDBonjour 2016 09 26 PDFDocument181 pagesMatlab Octave Cours JDBonjour 2016 09 26 PDFAlemPas encore d'évaluation
- Correction-Exo-3-TD No-3-SMI-S1-ABDocument5 pagesCorrection-Exo-3-TD No-3-SMI-S1-ABAbdel ouameurPas encore d'évaluation
- Khedmtii 3Document6 pagesKhedmtii 3nadjmob3Pas encore d'évaluation
- L'innovation Dans L'événementiel SportifDocument5 pagesL'innovation Dans L'événementiel SportifhealthcareexpooPas encore d'évaluation
- MEAG MDDX 66499 13 FR 1509Document300 pagesMEAG MDDX 66499 13 FR 1509xbruneauPas encore d'évaluation
- La Qualité en Mouvement: EFQMDocument40 pagesLa Qualité en Mouvement: EFQMNathalie ZaidPas encore d'évaluation
- TP #5Document6 pagesTP #5Poco LaPas encore d'évaluation
- Pompes Flygtk NDocument16 pagesPompes Flygtk NSamir PosiblePas encore d'évaluation
- Champions of Hara Doc FRDocument18 pagesChampions of Hara Doc FRRik ShuratoPas encore d'évaluation
- Examen 2021Document5 pagesExamen 2021Camelea AlxPas encore d'évaluation
- Blockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondeD'EverandBlockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondePas encore d'évaluation
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Python pour les hackers : Le guide des script kiddies : apprenez à créer vos propres outils de hackingD'EverandPython pour les hackers : Le guide des script kiddies : apprenez à créer vos propres outils de hackingÉvaluation : 5 sur 5 étoiles5/5 (1)
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationD'EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationPas encore d'évaluation
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- 101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerD'Everand101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- La communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseD'EverandLa communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseÉvaluation : 5 sur 5 étoiles5/5 (1)
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 5 sur 5 étoiles5/5 (2)
- Marketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxD'EverandMarketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxPas encore d'évaluation
- Dictionnaire politique d'internet et du numérique: Les cent enjeux de la société numériqueD'EverandDictionnaire politique d'internet et du numérique: Les cent enjeux de la société numériqueÉvaluation : 3 sur 5 étoiles3/5 (1)
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Kali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.D'EverandKali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.Évaluation : 5 sur 5 étoiles5/5 (1)
- Bien débuter avec JavaScript: Formation professionnelleD'EverandBien débuter avec JavaScript: Formation professionnellePas encore d'évaluation
- Réseau Anonyme Tor 101: Une Introduction à la Partie la Plus Privée de l'InternetD'EverandRéseau Anonyme Tor 101: Une Introduction à la Partie la Plus Privée de l'InternetÉvaluation : 2 sur 5 étoiles2/5 (2)
- Le plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentD'EverandLe plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentPas encore d'évaluation
- L'Intelligence Artificielle: Quels enjeux sociétaux ? Quels impacts annoncés sur la gouvernance des entreprises ?D'EverandL'Intelligence Artificielle: Quels enjeux sociétaux ? Quels impacts annoncés sur la gouvernance des entreprises ?Évaluation : 3 sur 5 étoiles3/5 (1)
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Maison Intelligente: Conception et réalisation d'une maison intelligenteD'EverandMaison Intelligente: Conception et réalisation d'une maison intelligenteÉvaluation : 4 sur 5 étoiles4/5 (5)