Vous aimerez peut-être aussi
- DécisionDocument8 pagesDécisionChambre de commercePas encore d'évaluation
- Conso Fruits Legumes Inra Synth-Resume PDFDocument88 pagesConso Fruits Legumes Inra Synth-Resume PDFStanislas TrolongePas encore d'évaluation
- Méthodes Des PotentielsDocument13 pagesMéthodes Des PotentielsChambre de commercePas encore d'évaluation
- ImplantationDocument15 pagesImplantationChambre de commercePas encore d'évaluation
- La Filiere Fruits Et Legumes PPT VRAI FINALDocument36 pagesLa Filiere Fruits Et Legumes PPT VRAI FINALChambre de commercePas encore d'évaluation
- Bts Ci-Rce Corrige U61Document5 pagesBts Ci-Rce Corrige U61Chambre de commercePas encore d'évaluation
- Chapitre 2 Les Strategies de La MaintenanceDocument8 pagesChapitre 2 Les Strategies de La MaintenanceSySekouAmadTidianePas encore d'évaluation
- Marketing Gagnant Aujourdhui - Grandes Theories PDFDocument46 pagesMarketing Gagnant Aujourdhui - Grandes Theories PDFEvina Grâce KouakouPas encore d'évaluation
- 1 - Audit Légal - Présentation de La Démarche Générale (Mode de Compatibilité)Document48 pages1 - Audit Légal - Présentation de La Démarche Générale (Mode de Compatibilité)Chambre de commercePas encore d'évaluation
- Corrige - BTSCI - Montage Des Operations D Import Export - 2012Document8 pagesCorrige - BTSCI - Montage Des Operations D Import Export - 2012Chambre de commercePas encore d'évaluation
- Chapitre 4 La Documentation en Maintenance PDFDocument8 pagesChapitre 4 La Documentation en Maintenance PDFbenadda makhlouf100% (1)
- MDG Résumé Étude Filière LégumesDocument8 pagesMDG Résumé Étude Filière LégumesChambre de commercePas encore d'évaluation
- Chapitre 5 Analyse Des Defaillances Et Aide Au DiagnosticDocument16 pagesChapitre 5 Analyse Des Defaillances Et Aide Au DiagnosticsisoPas encore d'évaluation
- Chapitre 3 Organisation Du Service MaintenanceDocument5 pagesChapitre 3 Organisation Du Service MaintenanceZellagui EnergyPas encore d'évaluation
- L'influence Des Politiques Agroalimentaires À Caractère Économique Sur L'alimentation Et Le Poids: SynthèseDocument12 pagesL'influence Des Politiques Agroalimentaires À Caractère Économique Sur L'alimentation Et Le Poids: SynthèseChambre de commercePas encore d'évaluation
- ETU-FEL-2015-consommation JeunesDocument44 pagesETU-FEL-2015-consommation JeunesChambre de commercePas encore d'évaluation
- Fede Fruits Legumes Aout 2013Document11 pagesFede Fruits Legumes Aout 2013Chambre de commercePas encore d'évaluation
- Fede Fruits Legumes Aout 2013Document11 pagesFede Fruits Legumes Aout 2013Chambre de commercePas encore d'évaluation
- MDG Résumé Étude Filière LégumesDocument8 pagesMDG Résumé Étude Filière LégumesChambre de commercePas encore d'évaluation
- Style Administratif PDFDocument77 pagesStyle Administratif PDFTouhamiBenhachemPas encore d'évaluation
- Fede Fruits Legumes Aout 2013Document11 pagesFede Fruits Legumes Aout 2013Chambre de commercePas encore d'évaluation
- La Filiere Fruits Et Legumes PPT VRAI FINALDocument36 pagesLa Filiere Fruits Et Legumes PPT VRAI FINALChambre de commercePas encore d'évaluation
- Corriges Manuel ManagementokDocument48 pagesCorriges Manuel ManagementokMed LaaboubiPas encore d'évaluation
- Pere Riche, Pere PauvreDocument225 pagesPere Riche, Pere Pauvreapi-2692721196% (113)
- 2014lil20005 PDFDocument524 pages2014lil20005 PDFRamatoulaye Diaw100% (2)
- Utilisation Logiciel Geometrie DynamiqueDocument60 pagesUtilisation Logiciel Geometrie DynamiqueChambre de commercePas encore d'évaluation
- Cours - Des - Entrepots Ok PDFDocument84 pagesCours - Des - Entrepots Ok PDFJebariPas encore d'évaluation
- Gestion de Projet Pour Les NulsDocument425 pagesGestion de Projet Pour Les Nulskouassi franck brou100% (8)
- Code Des Douanes 2016 1Document57 pagesCode Des Douanes 2016 1Chambre de commercePas encore d'évaluation
- Transmettre Des Données Avec l'URL: Informations Sur Le TutorielDocument10 pagesTransmettre Des Données Avec l'URL: Informations Sur Le TutorielHicham MoutchouPas encore d'évaluation
- Methode - ABC (Mode de Compatibilite) - CopieDocument19 pagesMethode - ABC (Mode de Compatibilite) - CopieSaloua Fennich100% (1)
- Publication 24Document1 pagePublication 24zanazePas encore d'évaluation
- TP PcvueDocument2 pagesTP PcvueMohamed ElbanadiPas encore d'évaluation
- Ecran Star War Force Est Destinée V0.1.Document5 pagesEcran Star War Force Est Destinée V0.1.ElendrakPas encore d'évaluation
- Rapport de Stage - Administration Réseau Et Dévéloppement WebDocument41 pagesRapport de Stage - Administration Réseau Et Dévéloppement Webnajm3dPas encore d'évaluation
- Serie 3Document3 pagesSerie 3amine dhaouiPas encore d'évaluation
- DocimologieDocument103 pagesDocimologieHafsa Grande Corazon100% (1)
- ImageRUNNER ADVANCE C3500 Series Service Manual - FR - 1.1Document1 239 pagesImageRUNNER ADVANCE C3500 Series Service Manual - FR - 1.1michael ourdanPas encore d'évaluation
- TecnAlarme PDFDocument44 pagesTecnAlarme PDFSemou DioufPas encore d'évaluation
- 1-Introduction Regulation PDFDocument14 pages1-Introduction Regulation PDFMed Ben Ahmed100% (1)
- Devis ChateauDocument1 pageDevis ChateauAlex AdamxPas encore d'évaluation
- Procedure Des Traitement Des Actions Correctives Et PreventivesDocument2 pagesProcedure Des Traitement Des Actions Correctives Et PreventivesAbdelatif Hr100% (1)
- Projet NeuromimetiqueDocument18 pagesProjet NeuromimetiqueKhadidja KssPas encore d'évaluation
- 981 Em15042013Document18 pages981 Em15042013elmoudjahid_dzPas encore d'évaluation
- Hwe 100Document79 pagesHwe 100Yavuz ErcanliPas encore d'évaluation
- Micro Swimmer RobotDocument8 pagesMicro Swimmer RobotAlvaroEnriqueQuinterosPas encore d'évaluation
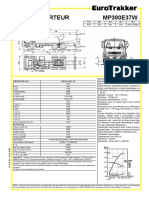
- FT Iveco Eurotrakker MP 380 e 37 W Francais PDFDocument2 pagesFT Iveco Eurotrakker MP 380 e 37 W Francais PDFSaidi JalelPas encore d'évaluation
- Gestion de Parc Auto: EnjeuxDocument8 pagesGestion de Parc Auto: EnjeuxDavid K. CophiePas encore d'évaluation
- Soft ProcessorsDocument17 pagesSoft ProcessorsSmirnov ArtaéévPas encore d'évaluation
- 2013 TH18334 Fixot Jean PDFDocument190 pages2013 TH18334 Fixot Jean PDFhubPas encore d'évaluation
- Technique CapitolDocument8 pagesTechnique Capitolformagnifique.francePas encore d'évaluation
- Elaborer Un SdsiDocument60 pagesElaborer Un Sdsizoomtn0% (1)
- HM012F-Banc Pertes de ChargesDocument56 pagesHM012F-Banc Pertes de ChargesAmor GharsalliPas encore d'évaluation
- FI IMB-37261 C V6C4-PETU-8 Place Anatole FranceDocument17 pagesFI IMB-37261 C V6C4-PETU-8 Place Anatole FrancembaitemrarrPas encore d'évaluation
- TD S+ Rie06Document2 pagesTD S+ Rie06FiroDjinsoNanoPas encore d'évaluation
- Outillage Sanitaire - Mesure 2000Document66 pagesOutillage Sanitaire - Mesure 2000Camelia SmahanPas encore d'évaluation
- Les Chaudiere A Vaporisation SimoDocument2 pagesLes Chaudiere A Vaporisation SimoCHOUKRI KamalPas encore d'évaluation
- Notice 4010Document58 pagesNotice 4010jalouzPas encore d'évaluation
- M50412 Formation Mettre en Oeuvre Microsoft Active Directory Federation Services 2 0 Adfs PDFDocument2 pagesM50412 Formation Mettre en Oeuvre Microsoft Active Directory Federation Services 2 0 Adfs PDFCertyouFormationPas encore d'évaluation