Vous aimerez peut-être aussi
- Nonlinear Control Feedback Linearization Sliding Mode ControlD'EverandNonlinear Control Feedback Linearization Sliding Mode ControlPas encore d'évaluation
- Combinatorial Algorithms: For Computers and CalculatorsD'EverandCombinatorial Algorithms: For Computers and CalculatorsÉvaluation : 4 sur 5 étoiles4/5 (2)
- Lab 3 State Feedback Control DesignDocument8 pagesLab 3 State Feedback Control DesignMuhammad AsaadPas encore d'évaluation
- Gilat ch07Document44 pagesGilat ch07Yanie TahaPas encore d'évaluation
- Part A: Working With MatricesDocument7 pagesPart A: Working With MatricesalibabawalaoaPas encore d'évaluation
- Experiment - 2 Matrix Algebra Using MATLABDocument3 pagesExperiment - 2 Matrix Algebra Using MATLABAbc PPas encore d'évaluation
- Check Stability of A: Appendix MATLAB CodeDocument6 pagesCheck Stability of A: Appendix MATLAB CodeApra Saurabh GuptaPas encore d'évaluation
- Control System Lab 1 INTI International UniversityDocument19 pagesControl System Lab 1 INTI International UniversityRisci TaranPas encore d'évaluation
- Linear Control System Lab Task No. 10: Submitted By: Hameed AkbarDocument4 pagesLinear Control System Lab Task No. 10: Submitted By: Hameed AkbarUmer EhsanPas encore d'évaluation
- E102 Using MATLAB in Feedback Systems Part I. Classical DesignDocument18 pagesE102 Using MATLAB in Feedback Systems Part I. Classical DesignLê Tuấn Minh100% (1)
- Chapter 3 Introduction To MATLABDocument31 pagesChapter 3 Introduction To MATLABDana AlabadlaPas encore d'évaluation
- Lab 1Document11 pagesLab 1Maitha SaeedPas encore d'évaluation
- Lab 4 Observer DesignDocument5 pagesLab 4 Observer DesignMuhammad AsaadPas encore d'évaluation
- Project Report Linear SystemsDocument39 pagesProject Report Linear SystemsMd.tanvir Ibny GiasPas encore d'évaluation
- Assgnmet 5Document13 pagesAssgnmet 5Dr-Saqib AliPas encore d'évaluation
- Experiment - 1 Introduction To MATLAB and Simple Operations Using MATLABDocument3 pagesExperiment - 1 Introduction To MATLAB and Simple Operations Using MATLABAbc PPas encore d'évaluation
- Experiment - 1 Introduction To MATLAB and Simple Operations Using MATLABDocument3 pagesExperiment - 1 Introduction To MATLAB and Simple Operations Using MATLABAbc PPas encore d'évaluation
- Ee 469Document39 pagesEe 469arwa zeglamPas encore d'évaluation
- Lab 3Document14 pagesLab 3Maitha SaeedPas encore d'évaluation
- Experiment - 1 Introduction To MATLAB and Simple Operations Using MATLABDocument3 pagesExperiment - 1 Introduction To MATLAB and Simple Operations Using MATLABAbc PPas encore d'évaluation
- Experiment File Course: Advance Control System (TEE 415) : Name: Divyam Raman ID: 52062Document18 pagesExperiment File Course: Advance Control System (TEE 415) : Name: Divyam Raman ID: 52062Divyam RamanPas encore d'évaluation
- Operators and AssignmentsDocument11 pagesOperators and AssignmentsManish Singh SuryavanshiPas encore d'évaluation
- Lab 06Document7 pagesLab 06Andy MeyerPas encore d'évaluation
- Arth CirDocument105 pagesArth Cirnoor_dcetPas encore d'évaluation
- Experiment Number 3:-Controllable and Canonical FormDocument2 pagesExperiment Number 3:-Controllable and Canonical FormSachin ShendePas encore d'évaluation
- 6 MatLab Tutorial ProblemsDocument27 pages6 MatLab Tutorial Problemsabhijeet834uPas encore d'évaluation
- Lab Record ON Matlab Simulation: Submitted By: Dharavath Pavan Kumar (31804112)Document66 pagesLab Record ON Matlab Simulation: Submitted By: Dharavath Pavan Kumar (31804112)Tanmay TiwariPas encore d'évaluation
- Chapter 8 State Space AnalysisDocument22 pagesChapter 8 State Space AnalysisAli AhmadPas encore d'évaluation
- PLC Level Control of Two TanksDocument36 pagesPLC Level Control of Two TanksBiruk TadesePas encore d'évaluation
- Lab 2Document13 pagesLab 2Từ Thị Hồng ĐiệpPas encore d'évaluation
- Code Programming by Mat LabDocument9 pagesCode Programming by Mat Labgirma workuPas encore d'évaluation
- Sample FinalDocument6 pagesSample FinalmagsinaPas encore d'évaluation
- Final Matlab ManuaDocument23 pagesFinal Matlab Manuaarindam samantaPas encore d'évaluation
- Matlab 15Document8 pagesMatlab 15Robert RoigPas encore d'évaluation
- 244 Cheat SheetDocument4 pages244 Cheat SheetGokul KalyanPas encore d'évaluation
- End-Term Examination - May 2017 Course: ECE2003 Control SystemsDocument2 pagesEnd-Term Examination - May 2017 Course: ECE2003 Control SystemsKunal JainPas encore d'évaluation
- Cs 354 Project 1Document12 pagesCs 354 Project 1Shane FosterPas encore d'évaluation
- EXP (5) - State Variable Feedback DesignDocument7 pagesEXP (5) - State Variable Feedback Designبدون اسمPas encore d'évaluation
- Linear Programming With Matlab: Z 150x 175x 150x 175xDocument6 pagesLinear Programming With Matlab: Z 150x 175x 150x 175xsuquillopPas encore d'évaluation
- SKEE 1022 Test 1 2018-19-2Document5 pagesSKEE 1022 Test 1 2018-19-2Sathya Gananaathaa SattiamurtiPas encore d'évaluation
- Comparison Between Full Order and Minimum Order Observer Controller For DC MotorDocument6 pagesComparison Between Full Order and Minimum Order Observer Controller For DC MotorInternational Journal of Research and DiscoveryPas encore d'évaluation
- Block Diagram Reduction: Aim: Apparatus Required: IN-BUILT Matlab CommandsDocument6 pagesBlock Diagram Reduction: Aim: Apparatus Required: IN-BUILT Matlab CommandsNathan ShankarPas encore d'évaluation
- 07a80202 AdvancedcontrolsystemsDocument7 pages07a80202 AdvancedcontrolsystemsSharanya ThirichinapalliPas encore d'évaluation
- matlabGetStart Course PDFDocument32 pagesmatlabGetStart Course PDFSam JacobPas encore d'évaluation
- 4364 540 DigitalControlDocument2 pages4364 540 DigitalControlyogesh_b_kPas encore d'évaluation
- Digital Signal Processing Systems, Basic Filtering Types, and Digital Filter RealizationsDocument21 pagesDigital Signal Processing Systems, Basic Filtering Types, and Digital Filter RealizationsmelkiPas encore d'évaluation
- 07a7ec36 Digitalcontrolsystems PDFDocument8 pages07a7ec36 Digitalcontrolsystems PDFetitahPas encore d'évaluation
- Laboratory Activity #4 NumsolDocument4 pagesLaboratory Activity #4 Numsoljames ceballosPas encore d'évaluation
- SISO-MIMO Design ExamplesDocument14 pagesSISO-MIMO Design ExamplesLuisGerardoPrietoPas encore d'évaluation
- EE QuesDocument7 pagesEE Quespratikchattopadhyay2Pas encore d'évaluation
- QuestionsDocument9 pagesQuestionsCristian MihaiPas encore d'évaluation
- Cosc 2836 Test #2 (Matlab)Document11 pagesCosc 2836 Test #2 (Matlab)MarkPas encore d'évaluation
- Controls Problems For Qualifying Exam - Spring 2014: Problem 1Document11 pagesControls Problems For Qualifying Exam - Spring 2014: Problem 1MnshPas encore d'évaluation
- Quiz 2Document2 pagesQuiz 2Ana NeacsuPas encore d'évaluation
- Using The Inverse of Matrix: Syntax: Output: ADocument5 pagesUsing The Inverse of Matrix: Syntax: Output: Amaski muzPas encore d'évaluation
- Problem 2: WC - 2 Solves For The Controllability Grammian at T 2Document9 pagesProblem 2: WC - 2 Solves For The Controllability Grammian at T 2Yongjia ShiPas encore d'évaluation
- The Controller Canonical Form: TopicsDocument17 pagesThe Controller Canonical Form: TopicsChandan KumarPas encore d'évaluation
- Successive OverDocument5 pagesSuccessive OverYohannesPas encore d'évaluation
- HW2 SolutionsDocument18 pagesHW2 SolutionsCharlotte FransonPas encore d'évaluation
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"D'EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Évaluation : 2.5 sur 5 étoiles2.5/5 (2)
- 66 - DeMello and Cocordia PaperDocument14 pages66 - DeMello and Cocordia PaperAhmed Salam100% (1)
- Reduced ObserverDocument1 pageReduced ObserverAhmed SalamPas encore d'évaluation
- Optimal Power Flow Problem Solution-Ahmed AbdulqaderDocument14 pagesOptimal Power Flow Problem Solution-Ahmed AbdulqaderAhmed Salam100% (1)
- General Purpose RegistersDocument3 pagesGeneral Purpose RegistersAhmed SalamPas encore d'évaluation
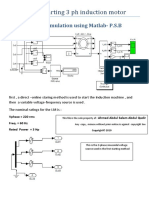
- Circuit Simulation Using MatlabDocument7 pagesCircuit Simulation Using MatlabAhmed SalamPas encore d'évaluation
- Proposal References 1Document2 pagesProposal References 1Ahmed SalamPas encore d'évaluation
- Mini TestcaseDocument17 pagesMini TestcaseAhmed SalamPas encore d'évaluation
- Calculating Free Energies Using Adaptive Biasing Force MethodDocument14 pagesCalculating Free Energies Using Adaptive Biasing Force MethodAmin SagarPas encore d'évaluation
- Uniform Motion WorksheetDocument8 pagesUniform Motion Worksheetnikhil patro100% (1)
- Banking Ombudsman 58Document4 pagesBanking Ombudsman 58Sahil GauravPas encore d'évaluation
- Sprinkler Sizing en v1Document12 pagesSprinkler Sizing en v1CristianDumitru0% (1)
- Documentation Report On School's Direction SettingDocument24 pagesDocumentation Report On School's Direction SettingSheila May FielPas encore d'évaluation
- Agma MachineDocument6 pagesAgma Machinemurali036Pas encore d'évaluation
- CSWIP-WP-19-08 Review of Welding Procedures 2nd Edition February 2017Document6 pagesCSWIP-WP-19-08 Review of Welding Procedures 2nd Edition February 2017oberai100% (1)
- Intelligent Status Monitoring System For Port Machinery: RMGC/RTGCDocument2 pagesIntelligent Status Monitoring System For Port Machinery: RMGC/RTGCfatsahPas encore d'évaluation
- Ficha Técnica Panel Solar 590W LuxenDocument2 pagesFicha Técnica Panel Solar 590W LuxenyolmarcfPas encore d'évaluation
- Stability Analysis of Geocell Reinforced Slopes by Considering Bending EffectDocument13 pagesStability Analysis of Geocell Reinforced Slopes by Considering Bending EffectRakesh KapoorPas encore d'évaluation
- Table of Reinforcement Anchorage Length & Lap Length - Eurocode 2Document7 pagesTable of Reinforcement Anchorage Length & Lap Length - Eurocode 2NgJackyPas encore d'évaluation
- JUnit 5 User GuideDocument90 pagesJUnit 5 User GuideaawaakPas encore d'évaluation
- DTR Testastretta Valve Adjustment ProcedureDocument10 pagesDTR Testastretta Valve Adjustment ProcedureTony LamprechtPas encore d'évaluation
- AP8 Q4 Ip9 V.02Document7 pagesAP8 Q4 Ip9 V.02nikka suitadoPas encore d'évaluation
- SievesDocument3 pagesSievesVann AnthonyPas encore d'évaluation
- "Organized Crime" and "Organized Crime": Indeterminate Problems of Definition. Hagan Frank E.Document12 pages"Organized Crime" and "Organized Crime": Indeterminate Problems of Definition. Hagan Frank E.Gaston AvilaPas encore d'évaluation
- Spectroscopic Methods For Determination of DexketoprofenDocument8 pagesSpectroscopic Methods For Determination of DexketoprofenManuel VanegasPas encore d'évaluation
- 2007 ATRA Seminar ManualDocument272 pages2007 ATRA Seminar Manualtroublezaur100% (3)
- Homework 9Document1 pageHomework 9Nat Dabuét0% (1)
- Plan Lectie Clasa 5 D HaineDocument5 pagesPlan Lectie Clasa 5 D HaineCristina GrapinoiuPas encore d'évaluation
- TIA Guidelines SingaporeDocument24 pagesTIA Guidelines SingaporeTahmidSaanidPas encore d'évaluation
- Test On Real NumberaDocument1 pageTest On Real Numberaer.manalirathiPas encore d'évaluation
- PDS DeltaV SimulateDocument9 pagesPDS DeltaV SimulateJesus JuarezPas encore d'évaluation
- Basic Terms/Concepts IN Analytical ChemistryDocument53 pagesBasic Terms/Concepts IN Analytical ChemistrySheralyn PelayoPas encore d'évaluation
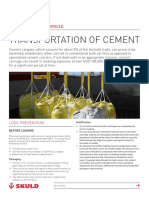
- Transportation of CementDocument13 pagesTransportation of CementKaustubh Joshi100% (1)
- Design ProjectDocument60 pagesDesign Projectmahesh warPas encore d'évaluation
- Chakir Sara 2019Document25 pagesChakir Sara 2019hiba toubaliPas encore d'évaluation
- Project Name: Repair of Afam Vi Boiler (HRSG) Evaporator TubesDocument12 pagesProject Name: Repair of Afam Vi Boiler (HRSG) Evaporator TubesLeann WeaverPas encore d'évaluation
- 23 Ray Optics Formula Sheets Getmarks AppDocument10 pages23 Ray Optics Formula Sheets Getmarks AppSiddhant KaushikPas encore d'évaluation
- Expression of Interest (Eoi)Document1 pageExpression of Interest (Eoi)Mozaffar HussainPas encore d'évaluation