Vous aimerez peut-être aussi
- Resolução OBMU 2019Document12 pagesResolução OBMU 2019Ruth Marcela Bown CuelloPas encore d'évaluation
- Função de 1º GrauDocument24 pagesFunção de 1º GrauClaudir Jose MoraisPas encore d'évaluation
- Lista 1Document5 pagesLista 1Nathan Nascimento SantosPas encore d'évaluation
- Otimização de problemas LPDocument29 pagesOtimização de problemas LPCarlos Alberto MPas encore d'évaluation
- Enem 2019: Guia de matemática com 40 tópicosDocument51 pagesEnem 2019: Guia de matemática com 40 tópicosTaciana MariottoPas encore d'évaluation
- Geometria_Analitica_e_Vetores_IDocument8 pagesGeometria_Analitica_e_Vetores_IPaulo Luis SempePas encore d'évaluation
- Cad C1 Exercicios 3serie 1opcao 1bim MatematicaDocument56 pagesCad C1 Exercicios 3serie 1opcao 1bim MatematicaRenato Severo100% (1)
- Apostila Equações e ProblemaDocument8 pagesApostila Equações e ProblemaEmerson TumpsPas encore d'évaluation
- Ficha 8Document11 pagesFicha 8LuisPas encore d'évaluation
- Pontos notáveis de uma parábolaDocument9 pagesPontos notáveis de uma parábolaDanielMatematicaColaresPas encore d'évaluation
- Equação Do 2º Grau - 1Document27 pagesEquação Do 2º Grau - 1delima_carvalho252Pas encore d'évaluation
- MA11 – Números e Funções ReaisDocument6 pagesMA11 – Números e Funções ReaisROBERTO MARCELINOPas encore d'évaluation
- Função quadrática: estudo completoDocument10 pagesFunção quadrática: estudo completoMaico de Nema CostaPas encore d'évaluation
- Sequência 4Document2 pagesSequência 4Gilmara e Lauro SantosPas encore d'évaluation
- Equações de 2º GrauDocument30 pagesEquações de 2º GrauRog OliverPas encore d'évaluation
- Cap5 PDFDocument10 pagesCap5 PDFElaineAmaralPas encore d'évaluation
- Função Polinoimial Do 2º GrauDocument12 pagesFunção Polinoimial Do 2º GraumatematiconotadezPas encore d'évaluation
- Funções polinomiais e racionaisDocument15 pagesFunções polinomiais e racionaisalasoles80% (5)
- 26 - Gráfico Da Função 2° GrauDocument7 pages26 - Gráfico Da Função 2° Grauprofedmarjunior950Pas encore d'évaluation
- Relações de GirardDocument19 pagesRelações de GirardSamuel Vilela de LimaPas encore d'évaluation
- Funções do 1o e 2o Grau: Definições e EstudoDocument20 pagesFunções do 1o e 2o Grau: Definições e EstudoItalo P MachadoPas encore d'évaluation
- Propriedades Dos Números ReaisDocument28 pagesPropriedades Dos Números ReaisVanderlei JuniorPas encore d'évaluation
- A - Funcao Quadratic A TeoriaDocument4 pagesA - Funcao Quadratic A TeoriaginattoPas encore d'évaluation
- Álgebra Linear Aplicada - Lista 1Document3 pagesÁlgebra Linear Aplicada - Lista 1Rony Wilson Quinaya MejiaPas encore d'évaluation
- TeoremaRF e SistLinDocument9 pagesTeoremaRF e SistLinGabriel Mendes MedeirosPas encore d'évaluation
- Funções Polinomiais: Gráficos, Raízes e Vértice de ParabólaDocument16 pagesFunções Polinomiais: Gráficos, Raízes e Vértice de ParabólaErick HenriquePas encore d'évaluation
- Matemática - Resumos Vestibular - Função QuadráticaDocument7 pagesMatemática - Resumos Vestibular - Função QuadráticaMatemática Mathclassy100% (6)
- Apostila de Equação Do 2º Grau (6 Páginas, 12 Questões)Document6 pagesApostila de Equação Do 2º Grau (6 Páginas, 12 Questões)Carlos SoaresPas encore d'évaluation
- Limite de função trigonométrica e ponto crítico de função racionalDocument6 pagesLimite de função trigonométrica e ponto crítico de função racionalCarlos EduardoPas encore d'évaluation
- AM3 16t2corDocument3 pagesAM3 16t2corrodrigues.profissional55Pas encore d'évaluation
- Função QuadráticaDocument11 pagesFunção QuadráticaMaeme MenescalPas encore d'évaluation
- Equações incompletas do 2° grauDocument12 pagesEquações incompletas do 2° grauLucas Pontes de SouzaPas encore d'évaluation
- Notas de AulaDocument22 pagesNotas de AulaKarol26 PortalPas encore d'évaluation
- Aplicações do TVM e propriedades da função exponencialDocument3 pagesAplicações do TVM e propriedades da função exponencialArthur DaherPas encore d'évaluation
- Cap2-Geometria e Programação LinearDocument20 pagesCap2-Geometria e Programação LinearMonicakriolahPas encore d'évaluation
- 4-Apostila Funcao Segundo GrauDocument14 pages4-Apostila Funcao Segundo Graupaulohm_Pas encore d'évaluation
- Inequação 2o grauDocument2 pagesInequação 2o grauMargarete Rodrigues BeloPas encore d'évaluation
- Aref 01 - ResumoDocument4 pagesAref 01 - Resumomatheusbertolino1Pas encore d'évaluation
- 14 Esp RDocument10 pages14 Esp RGonkas FrtPas encore d'évaluation
- Apostila Algebra Linear (Estudar)Document25 pagesApostila Algebra Linear (Estudar)Renan AmorimPas encore d'évaluation
- M Etodos Num Ericos para Solu C Ao de Equa C Oes N Ao - LinearesDocument5 pagesM Etodos Num Ericos para Solu C Ao de Equa C Oes N Ao - LinearesMarcos Adriano Mendonça de Lima PalmijianoPas encore d'évaluation
- Matemática: Funções do 2° Grau e ExponenciaisDocument10 pagesMatemática: Funções do 2° Grau e ExponenciaisBielzinclPas encore d'évaluation
- Função quadráticaDocument8 pagesFunção quadráticamarcelofilmsPas encore d'évaluation
- Explicaçao Monomios 9 AnoDocument8 pagesExplicaçao Monomios 9 AnoAndreia MartinsPas encore d'évaluation
- Inequações, Produto E Quociente: Principais Propriedades Das Desigualdades emDocument6 pagesInequações, Produto E Quociente: Principais Propriedades Das Desigualdades emguilhermelisboadesouza8Pas encore d'évaluation
- Equações de Primeiro e Segundo GrauDocument3 pagesEquações de Primeiro e Segundo GrauLuizaPas encore d'évaluation
- Equações de 2o Grau: Resolução e Interpretação do DiscriminanteDocument4 pagesEquações de 2o Grau: Resolução e Interpretação do DiscriminanteJunior ARAGÃOPas encore d'évaluation
- Análise Matemática I: Cálculo Diferencial e LimitesDocument3 pagesAnálise Matemática I: Cálculo Diferencial e LimitesAbrão AntónioPas encore d'évaluation
- Slides Cap 2 - RegsimplesDocument18 pagesSlides Cap 2 - RegsimplesDaniel EuzébioPas encore d'évaluation
- Como usar o gretl para regressãoDocument6 pagesComo usar o gretl para regressãonosdrachirPas encore d'évaluation
- EquadiofantinasDocument11 pagesEquadiofantinasapi-3799370100% (1)
- Cesc - Centro Educacional Sandra CavalcanteDocument25 pagesCesc - Centro Educacional Sandra CavalcanteEloáPas encore d'évaluation
- Atividade 7 - 8º Ano - MAT - Equações Do 1º Grau - Sistemas Com Duas Equações e Duas IncógnitasDocument4 pagesAtividade 7 - 8º Ano - MAT - Equações Do 1º Grau - Sistemas Com Duas Equações e Duas IncógnitasManuella MarianoPas encore d'évaluation
- Aula 18Document32 pagesAula 18Dário RoiaPas encore d'évaluation
- AnaliseDocument6 pagesAnaliseLeticia Mattos dos AnjosPas encore d'évaluation
- Ficha de Trabalho EquaçõesDocument9 pagesFicha de Trabalho EquaçõesEmilia ReisPas encore d'évaluation
- TD 06 Função Do 2° GrauDocument3 pagesTD 06 Função Do 2° GrauLuiz Cláudio Germano da CostaPas encore d'évaluation
- AULA 03 ES Processo Ciclos Vida 2-30-08 17Document53 pagesAULA 03 ES Processo Ciclos Vida 2-30-08 17nillpezzoniPas encore d'évaluation
- AULA - 08 - ES Atividade Processo - 20 09 17Document12 pagesAULA - 08 - ES Atividade Processo - 20 09 17nillpezzoniPas encore d'évaluation
- AULA 01 ES Introdução Conceitos Crise MitosDocument87 pagesAULA 01 ES Introdução Conceitos Crise MitosnillpezzoniPas encore d'évaluation
- Teoria da Computabilidade - Introdução às Linguagens FormaisDocument24 pagesTeoria da Computabilidade - Introdução às Linguagens FormaisnillpezzoniPas encore d'évaluation
- Projeto de pilares pré-moldados e dimensionamento de consolosDocument23 pagesProjeto de pilares pré-moldados e dimensionamento de consolosM OdebrechtPas encore d'évaluation
- Evaporador ContínuoDocument15 pagesEvaporador ContínuoJulianaPas encore d'évaluation
- Número de oxidação do nitrogênio, carbono e fósforo em compostosDocument2 pagesNúmero de oxidação do nitrogênio, carbono e fósforo em compostosAgeu AlmeidaPas encore d'évaluation
- Fundamentos de Química Analítica - Lista de Exercícios de Equilíbrio QuímicoDocument4 pagesFundamentos de Química Analítica - Lista de Exercícios de Equilíbrio QuímicoGustavo Henrique MarinPas encore d'évaluation
- Ensaios Económicos de Um Transformador TrifásicoDocument12 pagesEnsaios Económicos de Um Transformador TrifásicoRicardo Gomes100% (18)
- Trabalho Bombas-VedaçãoDocument41 pagesTrabalho Bombas-VedaçãoHen Rick100% (2)
- Velocidade Escalar MédiaDocument15 pagesVelocidade Escalar Média0001silvaPas encore d'évaluation
- Manual Tecnico de Aire AcondicionadoDocument24 pagesManual Tecnico de Aire AcondicionadoEdgar SosaPas encore d'évaluation
- Exercicios Resolvidos Aula 1 PDFDocument17 pagesExercicios Resolvidos Aula 1 PDFElisetePas encore d'évaluation
- Prova de Matemática do Concurso da AFA 2012Document21 pagesProva de Matemática do Concurso da AFA 2012Adriano PontesPas encore d'évaluation
- Equações QuímicasDocument6 pagesEquações QuímicasMyllenna VianaPas encore d'évaluation
- Fis 97Document7 pagesFis 97amandaPas encore d'évaluation
- Iluminação exterior completaDocument72 pagesIluminação exterior completaRita CaselliPas encore d'évaluation
- Anormalidade em bomba centrífugaDocument2 pagesAnormalidade em bomba centrífugaAntonio Melgaço da SilvaPas encore d'évaluation
- Máquinas de FluxoDocument4 pagesMáquinas de FluxoAlinne OliveiraPas encore d'évaluation
- História e Fund da RadiologiaDocument19 pagesHistória e Fund da RadiologiaRoberto MesquitaPas encore d'évaluation
- Lista de Cinemática EscalarDocument3 pagesLista de Cinemática EscalarWallace ValePas encore d'évaluation
- Curso de Tecnologia de Pavimento de Concreto - Módulo 4Document69 pagesCurso de Tecnologia de Pavimento de Concreto - Módulo 4Jônatas MartinsPas encore d'évaluation
- Manual ScorpioDocument9 pagesManual ScorpioFagundes FilhoPas encore d'évaluation
- Disjuntores termomagnéticosDocument17 pagesDisjuntores termomagnéticosAllan Dayse FulcoPas encore d'évaluation
- Determinação Espectrofotométrica Simultânea de Crómio e Manganês Numa Liga Metálica - CondoeiraDocument7 pagesDeterminação Espectrofotométrica Simultânea de Crómio e Manganês Numa Liga Metálica - CondoeiraSilva Condoeira100% (2)
- Correia Transportadora SlidesDocument87 pagesCorreia Transportadora Slidesfilipe50% (2)
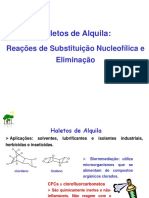
- Aula 02 - Haletos de Alquila, Alcoois, Éteres, Compostos Aromáticos e DerivadosDocument74 pagesAula 02 - Haletos de Alquila, Alcoois, Éteres, Compostos Aromáticos e DerivadosSérgio GénioPas encore d'évaluation
- Medição de corrente, tensão e resistência com pinça amperimétrica digitalDocument17 pagesMedição de corrente, tensão e resistência com pinça amperimétrica digitalWilson NetoPas encore d'évaluation
- D56Document4 pagesD56Alexandre AraújoPas encore d'évaluation
- Resistência dos Materiais: Tensão, Deformação e Lei de HookeDocument13 pagesResistência dos Materiais: Tensão, Deformação e Lei de HookeJosafá GomesPas encore d'évaluation
- RIBEIRO, Raquel Emerick - Profeta e AdoradorDocument43 pagesRIBEIRO, Raquel Emerick - Profeta e AdoradorMarcelo MantovaniPas encore d'évaluation
- Lindy 125Document24 pagesLindy 125Antonio AlbernazPas encore d'évaluation
- Ciclos limite e sistemas predador-presaDocument18 pagesCiclos limite e sistemas predador-presagustavoPas encore d'évaluation