Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Sage 200 Evolution Training JourneyDocument5 pagesSage 200 Evolution Training JourneysibaPas encore d'évaluation
- MC 33199Document12 pagesMC 33199Abbode HoraniPas encore d'évaluation
- French Revolution EssayDocument2 pagesFrench Revolution Essayapi-346293409Pas encore d'évaluation
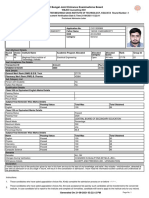
- West Bengal Joint Entrance Examinations Board: Provisional Admission LetterDocument2 pagesWest Bengal Joint Entrance Examinations Board: Provisional Admission Lettertapas chakrabortyPas encore d'évaluation
- Collection of Solid WasteDocument38 pagesCollection of Solid WasteMuhammad UsmanPas encore d'évaluation
- Induction-Llgd 2022Document11 pagesInduction-Llgd 2022Phạm Trúc QuỳnhPas encore d'évaluation
- Tankguard AR: Technical Data SheetDocument5 pagesTankguard AR: Technical Data SheetAzar SKPas encore d'évaluation
- Panch ShilDocument118 pagesPanch ShilSohel BangiPas encore d'évaluation
- E Rpms Portfolio Design 3 1Document52 pagesE Rpms Portfolio Design 3 1jebPas encore d'évaluation
- Descriptive Na Ly TicsDocument112 pagesDescriptive Na Ly TicsJay Mart AvanceñaPas encore d'évaluation
- Add New Question (Download - PHP? SC Mecon&id 50911)Document9 pagesAdd New Question (Download - PHP? SC Mecon&id 50911)AnbarasanPas encore d'évaluation
- Casesheet 086 Siwertell Hermasa Brazil Grain Unloader TerminalDocument2 pagesCasesheet 086 Siwertell Hermasa Brazil Grain Unloader TerminalersPas encore d'évaluation
- CRITERIA-GuideRail & Median BarriersDocument15 pagesCRITERIA-GuideRail & Median BarriersMartbenPas encore d'évaluation
- F9 Smart Study NotesDocument97 pagesF9 Smart Study NotesSteven Lino100% (5)
- Book Notes Covering: Andy Kirk's Book, Data Visualization - A Successful Design ProcessDocument10 pagesBook Notes Covering: Andy Kirk's Book, Data Visualization - A Successful Design ProcessDataVersed100% (1)
- UNECE-Turkey-TCDO-Rail Freight Traffic in Euro-Asian LinksDocument20 pagesUNECE-Turkey-TCDO-Rail Freight Traffic in Euro-Asian LinksArsenePas encore d'évaluation
- CERES News Digest - Week 11, Vol.4, March 31-April 4Document6 pagesCERES News Digest - Week 11, Vol.4, March 31-April 4Center for Eurasian, Russian and East European StudiesPas encore d'évaluation
- Year Warranty: 1575 - 90 Ave Edmonton, AB Canada T6P 0E2Document2 pagesYear Warranty: 1575 - 90 Ave Edmonton, AB Canada T6P 0E2juanchingarPas encore d'évaluation
- Berger Paints - Ar-19-20 PDFDocument302 pagesBerger Paints - Ar-19-20 PDFSahil Garg100% (1)
- General Description Product Summery: Bvdss Rdson IDDocument4 pagesGeneral Description Product Summery: Bvdss Rdson IDJose Angel TorrealbaPas encore d'évaluation
- Keywords: Communication, Technology, Collaborative, Evaluative Learning, InnovativeDocument11 pagesKeywords: Communication, Technology, Collaborative, Evaluative Learning, InnovativeNnamani EmmanuelPas encore d'évaluation
- Digest of Ganila Vs CADocument1 pageDigest of Ganila Vs CAJohn Lester LantinPas encore d'évaluation
- 201183-B-00-20 Part ListDocument19 pages201183-B-00-20 Part ListMohamed IsmailPas encore d'évaluation
- Engineering Materials-Istanbul .Technical UniversityDocument40 pagesEngineering Materials-Istanbul .Technical UniversitybuggrraaPas encore d'évaluation
- TM9-238 Deepwater Fording of Ordnance Materiel PDFDocument35 pagesTM9-238 Deepwater Fording of Ordnance Materiel PDFdieudecafePas encore d'évaluation
- Document 20Document3 pagesDocument 20api-586815209Pas encore d'évaluation
- 25 - Marketing Channels - Value Networks.Document2 pages25 - Marketing Channels - Value Networks.zakavision100% (1)
- Azure Subscription and Service Limits, Quotas, and ConstraintsDocument54 pagesAzure Subscription and Service Limits, Quotas, and ConstraintsSorinPas encore d'évaluation
- MIami Beach City Attorney's DenialDocument7 pagesMIami Beach City Attorney's DenialDavid Arthur WaltersPas encore d'évaluation
- Helsingborg EngDocument8 pagesHelsingborg EngMassaCoPas encore d'évaluation