Vous aimerez peut-être aussi
- Devoir de Synthèse N°3 2010 2011 (Hazel T)Document9 pagesDevoir de Synthèse N°3 2010 2011 (Hazel T)Kereme JulienPas encore d'évaluation
- dc2 3tech 2011 2012Document7 pagesdc2 3tech 2011 2012Bouabdellaoui saif ennasrPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie - DISPOSITIF DE BLOCAGE DES TUBES - 2ème Technique (2015-2016) MR Gassoumi TarekDocument4 pagesDevoir de Contrôle N°2 - Technologie - DISPOSITIF DE BLOCAGE DES TUBES - 2ème Technique (2015-2016) MR Gassoumi Tarekhayet debbichPas encore d'évaluation
- Machine de Découpage de Carton: Devoir de Controle N°1 Prénom: Classe: 2Sc N°Document5 pagesMachine de Découpage de Carton: Devoir de Controle N°1 Prénom: Classe: 2Sc N°Adel KmimechPas encore d'évaluation
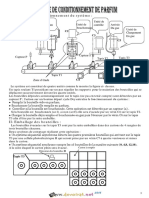
- Devoir de Contrôle N°1 - Génie Mécanique - Conditionnement de Parfum - 3ème Technique (2016-2017) MR MezniDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - Conditionnement de Parfum - 3ème Technique (2016-2017) MR MezniŚą ŅăPas encore d'évaluation
- Devoir de Contrôle N°1 (DT) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotDocument3 pagesDevoir de Contrôle N°1 (DT) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de Robotyassine zitouni100% (1)
- TechniqueDocument8 pagesTechniqueFredj Kriaa100% (2)
- DS3 - 2015 - 2016 FinaleDocument9 pagesDS3 - 2015 - 2016 FinaleRidha ManaaPas encore d'évaluation
- Technologie - Bridage - 3ème Technique (2015-2016) MR Mnejja SlimDocument7 pagesTechnologie - Bridage - 3ème Technique (2015-2016) MR Mnejja Slimammiwester100% (1)
- Devoir Syn FullDocument10 pagesDevoir Syn FullMouad Memni0% (1)
- Série Dexercices N°3 - Génie Électrique - GRAFCET Synchronisés - Bac Technique (2015-2016) MR Raouafi AbdallahDocument6 pagesSérie Dexercices N°3 - Génie Électrique - GRAFCET Synchronisés - Bac Technique (2015-2016) MR Raouafi Abdallahnajlae alfathiPas encore d'évaluation
- 4-Devoir de Synthese - Collage Etiquettes-2022Document6 pages4-Devoir de Synthese - Collage Etiquettes-2022TarekMostaphaPas encore d'évaluation
- Devoir de Contrôle N°3 2009 2010 (Ibn Rachiq Ezzahra)Document10 pagesDevoir de Contrôle N°3 2009 2010 (Ibn Rachiq Ezzahra)Manu CocoPas encore d'évaluation
- DTDocument4 pagesDTmohamed1101Pas encore d'évaluation
- Devoir de Controle N2-1AS-2019Document2 pagesDevoir de Controle N2-1AS-2019TarekMostaphaPas encore d'évaluation
- Machine de Debitage de CeinturesDocument14 pagesMachine de Debitage de CeinturesGuiliass100% (1)
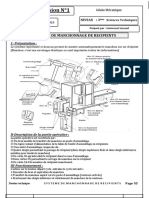
- Suj Et de Révision #1: Systeme de Manchonnage de RecipientsDocument3 pagesSuj Et de Révision #1: Systeme de Manchonnage de Recipientshamrouni100% (2)
- Statique Du SolideDocument4 pagesStatique Du SolideHal Sof100% (1)
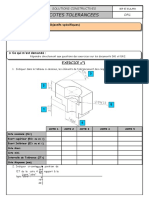
- Exercice Cotes ToleranDocument2 pagesExercice Cotes Toleransamir ghebouli100% (1)
- Cours Exercices TCT 1ère ST... Et 2 Ème SM-BDocument20 pagesCours Exercices TCT 1ère ST... Et 2 Ème SM-BMrnadhir MecaniquePas encore d'évaluation
- DT DC1 4TT ModifDocument3 pagesDT DC1 4TT ModifyahyaouiPas encore d'évaluation
- Cours - Génie Mécanique - Schéma Cinématique Appui Réglable - 3ème Technique (2016-2017) MR ABIDI MOURAD PDFDocument8 pagesCours - Génie Mécanique - Schéma Cinématique Appui Réglable - 3ème Technique (2016-2017) MR ABIDI MOURAD PDFANDAHMOUPas encore d'évaluation
- 2-Devoir de Synthése N2-1as-2023-Etau de CentrageDocument5 pages2-Devoir de Synthése N2-1as-2023-Etau de CentrageKarim AmmiPas encore d'évaluation
- Devoir 1 Modele 4 Si 2 Bac SM B Semestre 2Document11 pagesDevoir 1 Modele 4 Si 2 Bac SM B Semestre 2lemsouguer0% (1)
- DevoirDocument3 pagesDevoirsoufiane8fkaPas encore d'évaluation
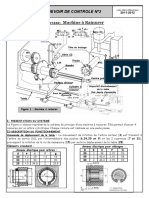
- Machine A Rainurer: Epreuve: Genie MecaniqueDocument5 pagesMachine A Rainurer: Epreuve: Genie MecaniqueNajet MarsPas encore d'évaluation
- DP Elec 13 - 14Document4 pagesDP Elec 13 - 14Elafif HamdiPas encore d'évaluation
- Dossier TechniqueDocument8 pagesDossier Techniquebenchikh lindaPas encore d'évaluation
- Cotes Tolerancees EleveDocument2 pagesCotes Tolerancees Elevesamir ghebouliPas encore d'évaluation
- Examens National 2bac Sci Genieur SMB 2012 R PDFDocument27 pagesExamens National 2bac Sci Genieur SMB 2012 R PDFHanane TounsiPas encore d'évaluation
- Série D'exercices N°8 - Génie Mécanique - Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanDocument1 pageSérie D'exercices N°8 - Génie Mécanique - Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanSelma SenioritaPas encore d'évaluation
- DevoirDocument2 pagesDevoirsoufiane8fkaPas encore d'évaluation
- Serie9 Asservissement PDFDocument8 pagesSerie9 Asservissement PDFHichem HamdiPas encore d'évaluation
- Corrige Technique 2014Document95 pagesCorrige Technique 2014Mohamed100% (1)
- Le Dessin D'ensemble-EDocument4 pagesLe Dessin D'ensemble-EMido Si CherniPas encore d'évaluation
- Exercice REPRESENTATION DES FILETAGESDocument1 pageExercice REPRESENTATION DES FILETAGESkingslimPas encore d'évaluation
- Exercice Cotation Fonctionnelle PDFDocument5 pagesExercice Cotation Fonctionnelle PDFNarjiss ShimiPas encore d'évaluation
- Devoir de Synthèse N°3 2008 2009 (Soudani Sami)Document4 pagesDevoir de Synthèse N°3 2008 2009 (Soudani Sami)Med Aymen Bensalem100% (1)
- Devoir de Contrôle N°1 - Technologie - 1ère AS (2015-2016) MR Abdallah Raouafi PDFDocument3 pagesDevoir de Contrôle N°1 - Technologie - 1ère AS (2015-2016) MR Abdallah Raouafi PDFTitan CR YZPas encore d'évaluation
- Devoir de Synthese N3 - Technologie - 2eme Sciences (2007-2008) Mme Toumi Imen-Systeme de Chargement de Sable de MoulageDocument6 pagesDevoir de Synthese N3 - Technologie - 2eme Sciences (2007-2008) Mme Toumi Imen-Systeme de Chargement de Sable de MoulageKamel Bousnina100% (1)
- Devoir de Synthèse N°1 - Technologie CHAINE D'EMBALLAGE DES FEUILLES DE PAPIER - Bac Technique (2012-2013) MR Hadjkacem AbdelkarimDocument11 pagesDevoir de Synthèse N°1 - Technologie CHAINE D'EMBALLAGE DES FEUILLES DE PAPIER - Bac Technique (2012-2013) MR Hadjkacem Abdelkarimيس المباركيPas encore d'évaluation
- Devoir N2 Cotation Fonctionelle 2 As Griffe 2012Document4 pagesDevoir N2 Cotation Fonctionelle 2 As Griffe 2012haykel71Pas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiDocument10 pagesDevoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiYoussef CherniPas encore d'évaluation
- Devoir de Synthèse N°2 2019 2020 (MR Mustapha Ben Ammar)Document14 pagesDevoir de Synthèse N°2 2019 2020 (MR Mustapha Ben Ammar)Ghayth Bouzayani0% (1)
- CH 5 Circuits Lineaires en Regime Sinusoidal MonophaseDocument17 pagesCH 5 Circuits Lineaires en Regime Sinusoidal Monophasekonan ezekielPas encore d'évaluation
- Poulie ArbreDocument1 pagePoulie ArbreMIMFSEdition100% (1)
- Activités - DessinDocument6 pagesActivités - DessinsoumeyaPas encore d'évaluation
- Devoir 3 Modele 5 Si 2 Bac SM B Semestre 1Document16 pagesDevoir 3 Modele 5 Si 2 Bac SM B Semestre 1lemsouguerPas encore d'évaluation
- A4 EE Et MA Mini Etau de Serrage 1Document3 pagesA4 EE Et MA Mini Etau de Serrage 1Rodolphe Sounou67% (3)
- 02 Poupee MobileDocument6 pages02 Poupee Mobilemasteratsii100% (1)
- Devoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument6 pagesDevoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineBen nasseur Mohamed aliPas encore d'évaluation
- 3-Devoir+de+synthese +N1-2AS-2021Document4 pages3-Devoir+de+synthese +N1-2AS-2021amri mohamedPas encore d'évaluation
- Technologie: Note: ./20Document3 pagesTechnologie: Note: ./20Marouen MekkiPas encore d'évaluation
- Devoir 3 Modele 1 Si 2 Bac SM B Semestre 2Document7 pagesDevoir 3 Modele 1 Si 2 Bac SM B Semestre 2lemsouguerPas encore d'évaluation
- 1ère Année Secondaire 0708 - Devoir de Synthése N°3Document5 pages1ère Année Secondaire 0708 - Devoir de Synthése N°3Kamel TayahiPas encore d'évaluation
- DS N°1-1AS-2020-hache+viandes+Document4 pagesDS N°1-1AS-2020-hache+viandes+Youssef Aouadi0% (1)
- DTDocument6 pagesDTAnonymous ljWszRodq71% (7)
- PHI-M211-liaison-pivot-tondeuse 2016Document5 pagesPHI-M211-liaison-pivot-tondeuse 2016Francis BECPas encore d'évaluation
- DC2 Bras Manipulateur PDFDocument8 pagesDC2 Bras Manipulateur PDFMohamed Adem GhorbelPas encore d'évaluation
- Devoir de Contrôle N°2 Génie Mécanique Bras Manipulateur 2017 2018 (Ghorbel Mamdouh)Document8 pagesDevoir de Contrôle N°2 Génie Mécanique Bras Manipulateur 2017 2018 (Ghorbel Mamdouh)dayzen jiffPas encore d'évaluation
- kp1 Flyer LongrinesDocument2 pageskp1 Flyer LongrinesshaichaykPas encore d'évaluation
- Chapitre 1 Généralités Sur Les TurbomachinesDocument5 pagesChapitre 1 Généralités Sur Les TurbomachinesRabehi DhoPas encore d'évaluation
- Epreuve E41 Bts Elec 2020 Metropole Elements de CorrectionDocument6 pagesEpreuve E41 Bts Elec 2020 Metropole Elements de CorrectionRégis ESCOBARPas encore d'évaluation
- Ordonnancement 1Document14 pagesOrdonnancement 1chaymaPas encore d'évaluation
- Les Efforts de CoupeDocument11 pagesLes Efforts de CoupeRaniya TebbalPas encore d'évaluation
- CH 00 - Histoire Des Systemes HydrauliquesDocument9 pagesCH 00 - Histoire Des Systemes HydrauliquesNírmo NìroPas encore d'évaluation
- TD1 MasDocument1 pageTD1 Masnicolas d'hourPas encore d'évaluation
- La Maintenance: Nom Et PrénomDocument1 pageLa Maintenance: Nom Et PrénomAbabacar Mbaye DIAGNEPas encore d'évaluation
- User Guide FELCO 802 - 802G - 812 - 822 - HP - V09 - 19 HD PRINT PDFDocument96 pagesUser Guide FELCO 802 - 802G - 812 - 822 - HP - V09 - 19 HD PRINT PDFAleksandar StojilkovicPas encore d'évaluation
- Rapport de TPDocument6 pagesRapport de TPDR BlackPas encore d'évaluation
- Exercices - Serie 2 - Elts de Machines CI1 2022 - 2023Document4 pagesExercices - Serie 2 - Elts de Machines CI1 2022 - 2023Sheeya FilaliPas encore d'évaluation
- Boschrexroth A2fm FRDocument46 pagesBoschrexroth A2fm FRRidha AbbassiPas encore d'évaluation
- Mur31Document4 pagesMur31Habib DridiPas encore d'évaluation
- Deenesfr v2.1 Hydraulic Motor With CoverDocument4 pagesDeenesfr v2.1 Hydraulic Motor With CovercamcadPas encore d'évaluation
- Compte Rendu TP52-ADAMS-VentilateurDocument10 pagesCompte Rendu TP52-ADAMS-VentilateurAmeni KhaledPas encore d'évaluation
- TP N 01 Methodes AnalyseDocument3 pagesTP N 01 Methodes AnalyseMahfoud BenmessahelPas encore d'évaluation
- Couverture Sadeu 1Document1 pageCouverture Sadeu 1Tchemaka Massaï OlivierPas encore d'évaluation
- Catalogue Calibres 2.02Document47 pagesCatalogue Calibres 2.02nizar trabelsiPas encore d'évaluation
- Notice Dutilisation Outils Wolf - Uve37Document28 pagesNotice Dutilisation Outils Wolf - Uve37azPas encore d'évaluation
- Chateau ValdagueDocument3 pagesChateau ValdagueBenPas encore d'évaluation
- TD de Mecanique Generale ISET Nabeul L1Document18 pagesTD de Mecanique Generale ISET Nabeul L1Adel ZitouniPas encore d'évaluation
- Maçonnerie PDFDocument39 pagesMaçonnerie PDFIng AndrePas encore d'évaluation
- FAG JVD Vers 14 OKDocument51 pagesFAG JVD Vers 14 OKrémi13Pas encore d'évaluation
- 1 DT9Document1 page1 DT9juliette ravinetPas encore d'évaluation
- Solution TD N°2 MDF - Exo 1 Et EXo2 - 21 - 22 - Statique Des FluidesDocument6 pagesSolution TD N°2 MDF - Exo 1 Et EXo2 - 21 - 22 - Statique Des Fluidessoundous mahmahPas encore d'évaluation
- Avis de Recrutement de 2 Electrom Caniciens 1659902381Document2 pagesAvis de Recrutement de 2 Electrom Caniciens 1659902381Mohamed Ibrahim YattaraPas encore d'évaluation
- Dimensionnement Arbre 2022Document26 pagesDimensionnement Arbre 2022Fedi Ben AliPas encore d'évaluation
- CV ArmelDocument1 pageCV ArmelheriniainaarmelrPas encore d'évaluation
- CCTP - Colonnes SèchesDocument3 pagesCCTP - Colonnes SèchesHakimPas encore d'évaluation
- Am 15L PDFDocument71 pagesAm 15L PDFAndrey LuquePas encore d'évaluation