Vous aimerez peut-être aussi
- A 2-10 GHZ Digital Cmos Phase Shifter For Ultra-Wideband Phased Array SystemDocument4 pagesA 2-10 GHZ Digital Cmos Phase Shifter For Ultra-Wideband Phased Array SystemHuy LuongPas encore d'évaluation
- A 50 MHZ Order Elliptic Lp-Filter Using Current Mode GM-C TopologyDocument4 pagesA 50 MHZ Order Elliptic Lp-Filter Using Current Mode GM-C TopologyYJ ZHANGPas encore d'évaluation
- 2013 - A 4-Path 42.8-To-49.5 GHZ LO GenerationDocument14 pages2013 - A 4-Path 42.8-To-49.5 GHZ LO GenerationmickPas encore d'évaluation
- OTA Based On CMOS Inverters and Application in The Design of Tunable Bandpass Filter PDFDocument10 pagesOTA Based On CMOS Inverters and Application in The Design of Tunable Bandpass Filter PDFGenetic JohnPas encore d'évaluation
- Phase Shifters Electronic & Mechanical Analog & Digital 200 KHZ To 3 GHZ General InformationDocument5 pagesPhase Shifters Electronic & Mechanical Analog & Digital 200 KHZ To 3 GHZ General Informationanon_626360020Pas encore d'évaluation
- Reference (15) Chae Jun Lee 2016J-IEEE-D-Band Gain-Boosted Current Bleeding Down Conversion MixerDocument3 pagesReference (15) Chae Jun Lee 2016J-IEEE-D-Band Gain-Boosted Current Bleeding Down Conversion MixerZohaib Hasan KhanPas encore d'évaluation
- Rm03A-2 13.5Mw, Lo/Loomhz With in 90Nm Cmos: A 1.4V, Tifh Order Elliptic Filternga Dc-Offset CorrectionDocument4 pagesRm03A-2 13.5Mw, Lo/Loomhz With in 90Nm Cmos: A 1.4V, Tifh Order Elliptic Filternga Dc-Offset CorrectionYJ ZHANGPas encore d'évaluation
- A CMOS/SOI Continuous-Time Low-Pass G - C Filter: C. Cavalcanti, J. A. de Lima & M. VerleysenDocument6 pagesA CMOS/SOI Continuous-Time Low-Pass G - C Filter: C. Cavalcanti, J. A. de Lima & M. Verleysentamerfarouk76Pas encore d'évaluation
- Reference Paper (21) Liu2018Document6 pagesReference Paper (21) Liu2018Zohaib Hasan KhanPas encore d'évaluation
- Wavelength Conversion ApproachesDocument7 pagesWavelength Conversion ApproachesgethcyPas encore d'évaluation
- DSA-218-2021 - Joe MarshellDocument23 pagesDSA-218-2021 - Joe MarshellscribdjoejoePas encore d'évaluation
- Efficient Supply Modulator For Wide-Band Envelope Elimination and Restoration Power AmplifiersDocument5 pagesEfficient Supply Modulator For Wide-Band Envelope Elimination and Restoration Power Amplifiersgaurav bhargavPas encore d'évaluation
- Ponencia - Filter - BodyDriven Gonzalez CarvajalDocument4 pagesPonencia - Filter - BodyDriven Gonzalez CarvajalFernando JarixPas encore d'évaluation
- A Gain Cmos: 50 MHZ Variable Amplifier Cell in 2PmDocument3 pagesA Gain Cmos: 50 MHZ Variable Amplifier Cell in 2Pmapi-19755952Pas encore d'évaluation
- A High Gain, Low Voltage Folded-Switching Mixer: With Current-Reuse in 0.18 CmosDocument4 pagesA High Gain, Low Voltage Folded-Switching Mixer: With Current-Reuse in 0.18 CmosAhmed MaGdyPas encore d'évaluation
- RFIC09 Symposium PaperDocument4 pagesRFIC09 Symposium PaperGbarbarPas encore d'évaluation
- 3-20 GHZ GaN MMIC Power Amplifier Design Through ADocument4 pages3-20 GHZ GaN MMIC Power Amplifier Design Through ARAJA RAMALINGAMPas encore d'évaluation
- An Adaptive Biased Single-Stage CMOS Operational Amplifier With A Novel Rail-To-Rail Constant-Gm Input StageDocument8 pagesAn Adaptive Biased Single-Stage CMOS Operational Amplifier With A Novel Rail-To-Rail Constant-Gm Input Stagekhausar1785Pas encore d'évaluation
- 0.7-V Three-Stage Class-AB CMOS OperationalDocument9 pages0.7-V Three-Stage Class-AB CMOS OperationalHarshit JainPas encore d'évaluation
- Optimal Cfo Channel Estimation For Adaptive Receiver DesignDocument5 pagesOptimal Cfo Channel Estimation For Adaptive Receiver DesignInternational Journal of Research in Engineering and TechnologyPas encore d'évaluation
- Digitized Feedforward Compensation Method For High Power Density Three-Phase VIENNA PFC ConverterDocument6 pagesDigitized Feedforward Compensation Method For High Power Density Three-Phase VIENNA PFC Convertergerson gomesPas encore d'évaluation
- A 1.82.6GHz RF CMOS Up-Conversion Mixer For Wideband ApplicationsDocument4 pagesA 1.82.6GHz RF CMOS Up-Conversion Mixer For Wideband ApplicationsJyotirmay SarkarPas encore d'évaluation
- IJETR041769Document5 pagesIJETR041769erpublicationPas encore d'évaluation
- CMOS Band-Pass Filter With Adjustable Center FrequencyDocument19 pagesCMOS Band-Pass Filter With Adjustable Center FrequencySerdar BenderliPas encore d'évaluation
- Design of Compact Reconfigurable Switched Line Microstrip Phase Shifters For Phased Array AntennaDocument3 pagesDesign of Compact Reconfigurable Switched Line Microstrip Phase Shifters For Phased Array AntennaMurthyPas encore d'évaluation
- 6.5 Watt, 35 GHZ Balanced Power Amplifier MMIC Using 6-Inch GaAs pHEMT Commercial TechnologyDocument4 pages6.5 Watt, 35 GHZ Balanced Power Amplifier MMIC Using 6-Inch GaAs pHEMT Commercial Technologyln zPas encore d'évaluation
- Digital Control Strategy To Maintian The Phase Shift For An Interleaved BCM Booct Converter ECCE 2017 1Document10 pagesDigital Control Strategy To Maintian The Phase Shift For An Interleaved BCM Booct Converter ECCE 2017 1dukliiPas encore d'évaluation
- Gaussian Minimum Shift KeyingDocument38 pagesGaussian Minimum Shift KeyingSaad AhsanPas encore d'évaluation
- All Inversion RegionDocument4 pagesAll Inversion RegionAshwin BhatPas encore d'évaluation
- Cband Microwave Rectifier Without Capacitors For Microwave Power TransmissionDocument6 pagesCband Microwave Rectifier Without Capacitors For Microwave Power TransmissionDewi Ulul AzmiPas encore d'évaluation
- A 95-dB Linear Low-Power Variable Gain AmplifierDocument10 pagesA 95-dB Linear Low-Power Variable Gain Amplifierkavicharan414Pas encore d'évaluation
- 2007-A Low-Noise Preamplifier With Adjustable Gain and Bandwidth For Biopotential Recording ApplicationsDocument4 pages2007-A Low-Noise Preamplifier With Adjustable Gain and Bandwidth For Biopotential Recording ApplicationsLuật TrầnPas encore d'évaluation
- CMOS Voltage Level Up Shifter A ReviewDocument4 pagesCMOS Voltage Level Up Shifter A ReviewtrephenaPas encore d'évaluation
- A Low Power 1-MHz Continuous-Time M Using A Passive Loop Filter Designed With A Genetic Algorithm ToolDocument4 pagesA Low Power 1-MHz Continuous-Time M Using A Passive Loop Filter Designed With A Genetic Algorithm Toolguna rajPas encore d'évaluation
- Vasil o Poulos 2006Document12 pagesVasil o Poulos 2006Tanjiro NadivaPas encore d'évaluation
- A Broadband High-Speed Programmable Multimodulus Divider Based On CMOS ProcessDocument7 pagesA Broadband High-Speed Programmable Multimodulus Divider Based On CMOS ProcessIssam FathallahPas encore d'évaluation
- Article ATSIP 1Document4 pagesArticle ATSIP 1amel.neifarPas encore d'évaluation
- A Two-Stage Fully Differential Inverter-Based Self-Biased CMOS Amplifier With High EfficiencyDocument13 pagesA Two-Stage Fully Differential Inverter-Based Self-Biased CMOS Amplifier With High EfficiencySudheer RajaPas encore d'évaluation
- Cmos Inverter As A ComparatorDocument5 pagesCmos Inverter As A ComparatorAnonymous TPVfFif6TOPas encore d'évaluation
- A Novel 1.5V DC Offset Cancellation CMOSDocument4 pagesA Novel 1.5V DC Offset Cancellation CMOSJebreel SalemPas encore d'évaluation
- Flowchart Bitloading OfdmDocument4 pagesFlowchart Bitloading Ofdmdeepa2400Pas encore d'évaluation
- Ehv Gis SubstationDocument6 pagesEhv Gis SubstationelectricalrakeshPas encore d'évaluation
- Conference 041818 PDFDocument6 pagesConference 041818 PDFĐỗ Tuấn HàoPas encore d'évaluation
- D 119Document35 pagesD 119Mohammad Ayatullah MaktoomPas encore d'évaluation
- MOSFET-C Filter With Low Excess Noise and Accurate AutomaticDocument8 pagesMOSFET-C Filter With Low Excess Noise and Accurate AutomaticsnehaPas encore d'évaluation
- A 10 Gb/s Low-power 4:1 Multiplexer in 0.18 μm CMOS: Xiang Sun, Jun FengDocument4 pagesA 10 Gb/s Low-power 4:1 Multiplexer in 0.18 μm CMOS: Xiang Sun, Jun FengPraveen SinghPas encore d'évaluation
- Single Photon Frequency Conversion For Frequency Multiplexed Quantum Networks in The Telecom BandDocument5 pagesSingle Photon Frequency Conversion For Frequency Multiplexed Quantum Networks in The Telecom BandStephen YinPas encore d'évaluation
- Widely Tunable Filter With A Negative Source Degeneration Resistor TransconductorDocument4 pagesWidely Tunable Filter With A Negative Source Degeneration Resistor TransconductorYJ ZHANGPas encore d'évaluation
- A 20dB Variable Gain AmplifierDocument4 pagesA 20dB Variable Gain Amplifierapi-19755952Pas encore d'évaluation
- Regular Correspondence: Compact High-Frequency Output Buffer For Testing of Analog CMOS VLSI CircuitsDocument3 pagesRegular Correspondence: Compact High-Frequency Output Buffer For Testing of Analog CMOS VLSI CircuitsSaranya ChakrabortyPas encore d'évaluation
- Transmission and Reception of The Multicarrier Signals The Generation Mobile Communication SystemDocument4 pagesTransmission and Reception of The Multicarrier Signals The Generation Mobile Communication SystemPrabhu TomPas encore d'évaluation
- Six-Port Modulator Based RF Transmission System Application in An OFDM EnviromentDocument6 pagesSix-Port Modulator Based RF Transmission System Application in An OFDM EnviromentWalter Santiago Campos ArandaPas encore d'évaluation
- A High-Gain Power-Efficient Wideband V-Band LNA in 0.18-M Sige BicmosDocument3 pagesA High-Gain Power-Efficient Wideband V-Band LNA in 0.18-M Sige BicmosOmarFaruqePas encore d'évaluation
- Coding and Modulation For Horrible ChannelDocument20 pagesCoding and Modulation For Horrible ChannelAnand KharviPas encore d'évaluation
- 263 C01332 001 PDFDocument4 pages263 C01332 001 PDFOmarFaruqePas encore d'évaluation
- Carrier Based Sinusodial PWM Scheme For The Nine Switch ConverterDocument6 pagesCarrier Based Sinusodial PWM Scheme For The Nine Switch ConverterShankar MukalPas encore d'évaluation
- Rfic 06 TyaoDocument4 pagesRfic 06 TyaoGanagadhar CHPas encore d'évaluation
- A Broadband High-Efficiency Rectifier For Mid-Field Wireless Power TransferDocument4 pagesA Broadband High-Efficiency Rectifier For Mid-Field Wireless Power Transfersaeed gholamiPas encore d'évaluation
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Pas encore d'évaluation
- High-Performance D/A-Converters: Application to Digital TransceiversD'EverandHigh-Performance D/A-Converters: Application to Digital TransceiversPas encore d'évaluation
- Pan Adapter Intro 1Document10 pagesPan Adapter Intro 1Michael GrahamPas encore d'évaluation
- Interlude 1 1 To 1 Counterpoint Exs PDFDocument4 pagesInterlude 1 1 To 1 Counterpoint Exs PDFMichael GrahamPas encore d'évaluation
- RTX5032A 40.000 MHZ (509100)Document8 pagesRTX5032A 40.000 MHZ (509100)Michael GrahamPas encore d'évaluation
- Tebe Pojem - MokranjacDocument4 pagesTebe Pojem - MokranjacMichael GrahamPas encore d'évaluation
- DP800 UserGuide enDocument144 pagesDP800 UserGuide enMichael GrahamPas encore d'évaluation
- Two Part LiturgyDocument38 pagesTwo Part LiturgyMichael GrahamPas encore d'évaluation
- 2011 Niknejad Lecture FeedbackDocument36 pages2011 Niknejad Lecture FeedbackMichael GrahamPas encore d'évaluation
- Linear Technology-Understanding IP2 and IP3 Issues in Direct Conversion Receivers For WCDMA Wide Area BasestationsDocument5 pagesLinear Technology-Understanding IP2 and IP3 Issues in Direct Conversion Receivers For WCDMA Wide Area BasestationsMichael GrahamPas encore d'évaluation
- LAB3 Design of Differential LNADocument4 pagesLAB3 Design of Differential LNAMichael GrahamPas encore d'évaluation
- Fact ClaimsDocument2 pagesFact ClaimsMichael GrahamPas encore d'évaluation
- Chapter 11 Laboratory ExperimentDocument102 pagesChapter 11 Laboratory ExperimentMrinal TakPas encore d'évaluation
- Features Description: 1A Positive Voltage Regulators (Preliminary)Document5 pagesFeatures Description: 1A Positive Voltage Regulators (Preliminary)Ti Ger100% (1)
- EC2402 - OCN Two Marks Questions and AnswersDocument37 pagesEC2402 - OCN Two Marks Questions and AnswersshanmugachitraPas encore d'évaluation
- Manual ATAC 8000Document48 pagesManual ATAC 8000blctech2100% (1)
- Kef psw-2500Document13 pagesKef psw-2500Ferenc HanolPas encore d'évaluation
- Applied Physics AssignmentDocument3 pagesApplied Physics AssignmentareejPas encore d'évaluation
- Descriptive Questions Class: III/IV B.TECH SUB: Microwave EngineeringDocument3 pagesDescriptive Questions Class: III/IV B.TECH SUB: Microwave EngineeringsatyaPas encore d'évaluation
- Fabrication of PN Junction DiodeDocument11 pagesFabrication of PN Junction DiodeV.Harika.78% (9)
- 40-Gb/s Transimpedance Amplifier in 0.18 - M CMOS Technology: Jun-De Jin and Shawn S. H. HsuDocument4 pages40-Gb/s Transimpedance Amplifier in 0.18 - M CMOS Technology: Jun-De Jin and Shawn S. H. HsuTshering Sangmo SherpaPas encore d'évaluation
- Ny32w Rev ADocument2 pagesNy32w Rev AmhafizanPas encore d'évaluation
- Current Electricity 3Document13 pagesCurrent Electricity 3Mona Mohamed SafwatPas encore d'évaluation
- Use of The MOSFET As A Voltage-Controlled ResistorDocument2 pagesUse of The MOSFET As A Voltage-Controlled Resistorhome2423100% (1)
- 3.2 FET BiasingDocument4 pages3.2 FET Biasinglizhi0007Pas encore d'évaluation
- Unit5-8051 4th Sem Anna University CseDocument21 pagesUnit5-8051 4th Sem Anna University CseVijayashree VenkatPas encore d'évaluation
- Double Data Rate I/O (ALTDDIO - IN, ALTDDIO - OUT, and ALTDDIO - BIDIR) IP Cores User GuideDocument22 pagesDouble Data Rate I/O (ALTDDIO - IN, ALTDDIO - OUT, and ALTDDIO - BIDIR) IP Cores User Guidesantanu_sinha87Pas encore d'évaluation
- Report - Solar Thermoelectric Refrigeration NewDocument16 pagesReport - Solar Thermoelectric Refrigeration NewsachinPas encore d'évaluation
- 3-Channel Linear Driver: Ics For Cd/Cd-Rom PlayerDocument4 pages3-Channel Linear Driver: Ics For Cd/Cd-Rom PlayertommyhghPas encore d'évaluation
- Rearmount: 68RM45-104 68RM45-604 68RM45-704Document13 pagesRearmount: 68RM45-104 68RM45-604 68RM45-704Karl GoPas encore d'évaluation
- CRT TV Repair Course Humphrey KimathiDocument131 pagesCRT TV Repair Course Humphrey KimathiNsb El-kathiri91% (54)
- Igbt DatasheetDocument8 pagesIgbt Datasheetkemal100% (1)
- Model Ut51-55: Operating ManualDocument20 pagesModel Ut51-55: Operating ManualAdv Faizan GorayaPas encore d'évaluation
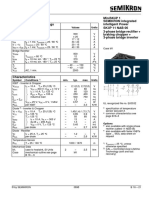
- SKIIP11NAB06Document4 pagesSKIIP11NAB06Cucu Catalin100% (1)
- Perkembangan Arsitektur KomputerDocument39 pagesPerkembangan Arsitektur KomputerJaluprasetyoPas encore d'évaluation
- Mfmis VS MfisDocument7 pagesMfmis VS Mfis이종원Pas encore d'évaluation
- Mini Amplicador Pam8304 PDFDocument11 pagesMini Amplicador Pam8304 PDFManolo QueritoPas encore d'évaluation
- EPAS 11 - Q1 - W5-W6 - Mod4Document29 pagesEPAS 11 - Q1 - W5-W6 - Mod4Alberto A. FugenPas encore d'évaluation
- ECE Materials and Components Section 1Document9 pagesECE Materials and Components Section 1MoneyPas encore d'évaluation
- Diode Equation and ModelsDocument24 pagesDiode Equation and ModelsJayann GonzalesPas encore d'évaluation
- HD 74 Ls 10 PDocument6 pagesHD 74 Ls 10 PalexarotPas encore d'évaluation
- High Voltage Pulse Crushing of Mono and Poly Silicon: @selfrag - Ag +41 317 503 232Document7 pagesHigh Voltage Pulse Crushing of Mono and Poly Silicon: @selfrag - Ag +41 317 503 232alifPas encore d'évaluation