Vous aimerez peut-être aussi
- General Thread: No Flavor Hard Math Bad ArtDocument4 pagesGeneral Thread: No Flavor Hard Math Bad ArtAnonymous q9PRRY25% (4)
- 400te Linear WinchDocument2 pages400te Linear Winchjohariak100% (1)
- 40t Rope Drum Hoist220512Document37 pages40t Rope Drum Hoist220512Anonymous sfkedkymPas encore d'évaluation
- Checlist Kelompok Pressure VesselDocument8 pagesCheclist Kelompok Pressure VesselerniPas encore d'évaluation
- Projectreport ExcavatorArmDocument41 pagesProjectreport ExcavatorArmVinod Yb0% (1)
- Ametecs Crane Desigh & DetailsDocument23 pagesAmetecs Crane Desigh & DetailsJayakrishnan RadhakrishnanPas encore d'évaluation
- Wire Rope End ConnectionDocument16 pagesWire Rope End ConnectionxmancatPas encore d'évaluation
- Crane Drums and CablesDocument4 pagesCrane Drums and Cablesjoe_frangieh100% (1)
- Winches System Design - Thesis Paper Incl Calculations PT2Document17 pagesWinches System Design - Thesis Paper Incl Calculations PT2heddichead100% (1)
- Winch DesignDocument132 pagesWinch Designzeek7767% (3)
- Axle HoldersDocument1 pageAxle HoldersjoseocsilvaPas encore d'évaluation
- Slew Cranes in ShipyardsDocument72 pagesSlew Cranes in ShipyardsGogy100% (1)
- IADC/SPE 87158 Taut Leg Moorings Using Polyester and VLA AnchorsDocument6 pagesIADC/SPE 87158 Taut Leg Moorings Using Polyester and VLA AnchorsmsmsoftPas encore d'évaluation
- Winch AnalysisDocument21 pagesWinch Analysisvarshasdm19870% (1)
- Calcul Reductor WinchDocument41 pagesCalcul Reductor WinchAndrei TasePas encore d'évaluation
- Winch DesignDocument132 pagesWinch DesignShreyas Raut100% (2)
- 200te Reel Hub DriveDocument3 pages200te Reel Hub Drivejohariak100% (1)
- W B H in Inches Cable Diam.: Case 1Document4 pagesW B H in Inches Cable Diam.: Case 1RAMSINGH CHAUHANPas encore d'évaluation
- Sheave Manual SMDocument8 pagesSheave Manual SMLutfi IsmailPas encore d'évaluation
- 10 Single Drum WinchesDocument54 pages10 Single Drum Wincheskelvinyeoh100% (3)
- 科尼起重机 ShipyardDocument16 pages科尼起重机 ShipyardHui ChenPas encore d'évaluation
- 30te Hydraulic Winch: Underwater Technology Services (S) Pte LTDDocument5 pages30te Hydraulic Winch: Underwater Technology Services (S) Pte LTDjohariakPas encore d'évaluation
- KC SC Spreader en 01Document7 pagesKC SC Spreader en 01Mohammed Muzzammil100% (1)
- GunneboDocument36 pagesGunnebomordidomiPas encore d'évaluation
- How To Design A Big New WinchDocument4 pagesHow To Design A Big New WinchMahdiPas encore d'évaluation
- Atlas 30tonne Waterfall Hyd Transvictory Winch Spec Sheet PDFDocument1 pageAtlas 30tonne Waterfall Hyd Transvictory Winch Spec Sheet PDFIvan MaltsevPas encore d'évaluation
- Hoisting Grips For Coaxial Cable and Elliptical WaveguideDocument9 pagesHoisting Grips For Coaxial Cable and Elliptical WaveguideRv SalazarPas encore d'évaluation
- ACE WinchDocument24 pagesACE Winche_qdaPas encore d'évaluation
- Wire Rope Exchange June 2011Document72 pagesWire Rope Exchange June 2011Melissa HoodPas encore d'évaluation
- 11-Winches.50 2002 200603Document16 pages11-Winches.50 2002 200603Mohamed SalemPas encore d'évaluation
- Liebert Challenger 3000-3-5 Ton Installation ManualDocument76 pagesLiebert Challenger 3000-3-5 Ton Installation ManualDanyer RosalesPas encore d'évaluation
- Winch Drive CalculationsDocument3 pagesWinch Drive Calculationsretrospect1000100% (6)
- CraneDocument19 pagesCranedeua2004Pas encore d'évaluation
- Manual ENGDocument91 pagesManual ENGbrunosamaeianPas encore d'évaluation
- Calcule WinchDocument125 pagesCalcule WinchMarian Manea67% (3)
- BS MA 55 Lifeboat WinchesDocument8 pagesBS MA 55 Lifeboat WinchesZohair AftabPas encore d'évaluation
- Urban Transport Guidelines - Geometric Design of Urban Colloctor RoadsDocument26 pagesUrban Transport Guidelines - Geometric Design of Urban Colloctor RoadsCharl de Reuck100% (1)
- PV Module Safety Qualification According To IEC 61730:2004 EN 61730:2007Document6 pagesPV Module Safety Qualification According To IEC 61730:2004 EN 61730:2007Vinko RazlPas encore d'évaluation
- 13bentonit SlurryDocument24 pages13bentonit SlurrykesharinareshPas encore d'évaluation
- 30tonne Transvictory Double Drum Winch PDFDocument1 page30tonne Transvictory Double Drum Winch PDFIvan MaltsevPas encore d'évaluation
- Improvement Design of WinchesDocument77 pagesImprovement Design of WinchesNurseptian Pratomo100% (1)
- Otc 3669 MSDocument10 pagesOtc 3669 MSanon_401712377Pas encore d'évaluation
- Khan Cranes PresentationDocument28 pagesKhan Cranes PresentationMili Marius100% (1)
- Amine Gas Sweetening Systems PsDocument3 pagesAmine Gas Sweetening Systems Pscanada_198020008918Pas encore d'évaluation
- Wire Drum DesignDocument8 pagesWire Drum DesignJonathan Lynch100% (2)
- Royal 77Document131 pagesRoyal 77victorPas encore d'évaluation
- Lubrication Basics For Wire RopesDocument5 pagesLubrication Basics For Wire RopesGuru Raja Ragavendran NagarajanPas encore d'évaluation
- Beam - Design ProcessDocument2 pagesBeam - Design ProcessKory EstesPas encore d'évaluation
- Eilbeck Catalogue 2013 WinchesDocument15 pagesEilbeck Catalogue 2013 WinchesyaskawaPas encore d'évaluation
- Lebus BulletinDocument4 pagesLebus BulletinNaval2014DNPas encore d'évaluation
- Fluid Power FormulasDocument8 pagesFluid Power FormulasPradeep KumarPas encore d'évaluation
- CraneDocument10 pagesCranerezaPas encore d'évaluation
- Comissionamento Do Sistema de Pull in PDFDocument65 pagesComissionamento Do Sistema de Pull in PDFrfelippe8733Pas encore d'évaluation
- Sibre Crane Wheel SystemsDocument13 pagesSibre Crane Wheel SystemsLeonardo CanditoPas encore d'évaluation
- Catalog Vinciuri IMATRANSDocument18 pagesCatalog Vinciuri IMATRANSVlad AndronachePas encore d'évaluation
- Winch Drum Capacity CalculationsDocument2 pagesWinch Drum Capacity CalculationsDwi ArifPas encore d'évaluation
- Minimum Breaking Force of Wire RopeDocument23 pagesMinimum Breaking Force of Wire RopeHuruk BrosnanPas encore d'évaluation
- Ejemplo Sepson-manual-EN-dec - 2014 PDFDocument91 pagesEjemplo Sepson-manual-EN-dec - 2014 PDFAngelPas encore d'évaluation
- Standard Tooth Proportions For Helical GearsDocument2 pagesStandard Tooth Proportions For Helical GearsVenkatesh KumarPas encore d'évaluation
- Hydraulic Hybrid DriveDocument5 pagesHydraulic Hybrid Driveiamvik100% (2)
- Thong So Ky ThuatDocument30 pagesThong So Ky ThuatQuang HưngPas encore d'évaluation
- Wintech PDFDocument32 pagesWintech PDFVasiljka Đordan JelacaPas encore d'évaluation
- Comparison Between Lattice Boom and Knuckle BoomDocument2 pagesComparison Between Lattice Boom and Knuckle BoomG.SWAMI100% (2)
- Overland Belt ConveyorsDocument13 pagesOverland Belt ConveyorsRodrigo GarcíaPas encore d'évaluation
- Wireline ServicesDocument21 pagesWireline ServicesweldsvPas encore d'évaluation
- A Machine For Interactive Fatigue TestinDocument11 pagesA Machine For Interactive Fatigue Testinshah nauman100% (1)
- Transmission Line Construction and Maintenance: Sherman & ReillyDocument8 pagesTransmission Line Construction and Maintenance: Sherman & ReillyMauricio Mercado VargasPas encore d'évaluation
- Guidelines For The Construction and Maintenance of Transmission LinesDocument8 pagesGuidelines For The Construction and Maintenance of Transmission LinesPierre Enrique Carrasco FuentesPas encore d'évaluation
- MetaSolv IntroductionDocument121 pagesMetaSolv Introductionkch_298Pas encore d'évaluation
- 91 91 Issue 7 AMD 3 2Document38 pages91 91 Issue 7 AMD 3 2andre_jvcPas encore d'évaluation
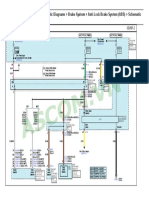
- 2018 G 1.0 MPI KAPPA Schematic Diagrams Brake System Anti-Lock Brake System (ABS) Schematic DiagramsDocument1 page2018 G 1.0 MPI KAPPA Schematic Diagrams Brake System Anti-Lock Brake System (ABS) Schematic DiagramsHuy Trần QuốcPas encore d'évaluation
- BenderDocument6 pagesBenderIftekhar AnamPas encore d'évaluation
- History: Aviation Is The Practical Aspect or Art ofDocument3 pagesHistory: Aviation Is The Practical Aspect or Art ofEarle J ZaficoPas encore d'évaluation
- Hall Design For SpeechDocument1 pageHall Design For SpeechSarovar SaroPas encore d'évaluation
- Board 2Document1 pageBoard 2kristine_nilsen_2Pas encore d'évaluation
- Twin Disc SP318IL BulletinDocument2 pagesTwin Disc SP318IL BulletinAnonymous Kr13NEBPas encore d'évaluation
- The Desc Quality Program For Electronic PartsDocument6 pagesThe Desc Quality Program For Electronic PartsmoaPas encore d'évaluation
- SiemensDocument254 pagesSiemensRogelio ValdezPas encore d'évaluation
- Declaration of Conformity: (Acc. To ISO/IEC 17050-1)Document2 pagesDeclaration of Conformity: (Acc. To ISO/IEC 17050-1)Kiril AckovskiPas encore d'évaluation
- Brosur SikaDocument7 pagesBrosur SikachaerulPas encore d'évaluation
- AP Lab Assignment 1Document30 pagesAP Lab Assignment 1Ahmad AlsharefPas encore d'évaluation
- Productguide - Chemicals Aceites FleetriteDocument12 pagesProductguide - Chemicals Aceites FleetriteJose AlbertoPas encore d'évaluation
- Conpress: Moidinafsan - Cv15@Rvce - Edu.InDocument3 pagesConpress: Moidinafsan - Cv15@Rvce - Edu.InMoidin AfsanPas encore d'évaluation
- API MPMS ListaDocument6 pagesAPI MPMS ListaeduinPas encore d'évaluation
- BEL Papers Previous YearsDocument121 pagesBEL Papers Previous YearsjayacharanPas encore d'évaluation
- Design of Cold Formed Sections by Satish KumarDocument62 pagesDesign of Cold Formed Sections by Satish Kumarspawar1988Pas encore d'évaluation
- CDB2043 - CH 03 - StoichiometryDocument36 pagesCDB2043 - CH 03 - StoichiometryAqilah HanimPas encore d'évaluation
- Fasson 0828 DatasheetDocument2 pagesFasson 0828 DatasheetGregory Alan Francisco IIPas encore d'évaluation
- Advance Electronics: UnacademyDocument38 pagesAdvance Electronics: UnacademyhemuPas encore d'évaluation
- Atmospheric Storage Tanks Venting Req API 2000 (6th ED 2009)Document15 pagesAtmospheric Storage Tanks Venting Req API 2000 (6th ED 2009)HyungTae JangPas encore d'évaluation