Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Design of Foundation Bases Robot Structural AnalysisDocument23 pagesDesign of Foundation Bases Robot Structural AnalysisIk Einstein OjoganPas encore d'évaluation
- Old ProjectDocument44 pagesOld ProjectAdnan AnwerPas encore d'évaluation
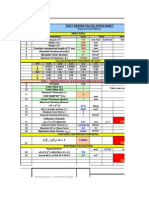
- Duct Design Calculation Sheet: Note:-Take the Value of α & β from above table use in the calculationDocument9 pagesDuct Design Calculation Sheet: Note:-Take the Value of α & β from above table use in the calculationchagar_harshPas encore d'évaluation
- RocData Product SheetDocument2 pagesRocData Product SheetIS AneurPas encore d'évaluation
- Test in ADSS Cable in Tensile and TSDocument4 pagesTest in ADSS Cable in Tensile and TSMarcos A Valera OPas encore d'évaluation
- Epfl Th3214 App ADocument47 pagesEpfl Th3214 App Avlad lupasteanuPas encore d'évaluation
- 1 s2.0 S2352492822012466 MainDocument13 pages1 s2.0 S2352492822012466 MainjimPas encore d'évaluation
- JP002 Tin Whiskers TheoryDocument30 pagesJP002 Tin Whiskers Theorydemolinux100% (3)
- Imprtant DefinitionsDocument17 pagesImprtant DefinitionsSaurabh BarangePas encore d'évaluation
- Extrusion Tooling: Uddeholm Tool Steels ForDocument20 pagesExtrusion Tooling: Uddeholm Tool Steels ForRizqi Aulia RamadhaniPas encore d'évaluation
- Dynamic Analysis of Three-Roll Pyramidal Configuration Roll Bending Process and Experimental VerificationDocument7 pagesDynamic Analysis of Three-Roll Pyramidal Configuration Roll Bending Process and Experimental Verificationdesign mosPas encore d'évaluation
- Topic 4 - TensionDocument13 pagesTopic 4 - TensionDough NutPas encore d'évaluation
- SOM Content Beyond SyllabusDocument11 pagesSOM Content Beyond SyllabusVignesh VickyPas encore d'évaluation
- Irc 112.2020Document256 pagesIrc 112.2020jcmohinishenoy100% (2)
- IRECN Bridge Bearing-2Document21 pagesIRECN Bridge Bearing-2vpmohammedPas encore d'évaluation
- Im StremaDocument49 pagesIm StremaKenneth BesmontePas encore d'évaluation
- International Journal of Plasticity: Luiz Carneiro, Qin Yu, Yanyao JiangDocument17 pagesInternational Journal of Plasticity: Luiz Carneiro, Qin Yu, Yanyao JiangBangjian YangPas encore d'évaluation
- Framecad-Bs En1991-13-2006Document11 pagesFramecad-Bs En1991-13-2006Aie BantuganPas encore d'évaluation
- Finite Element Methods of Structural AnalysisDocument98 pagesFinite Element Methods of Structural Analysiswaqasahmed1983100% (1)
- Thermal ExpanssionDocument8 pagesThermal Expanssionbrijesh kinkhabPas encore d'évaluation
- Notes Plate 2Document2 pagesNotes Plate 2Dawnald Pepito0% (1)
- Optimizing FSW Aluminium FatigueDocument14 pagesOptimizing FSW Aluminium FatigueDaniel MarquesPas encore d'évaluation
- 205 PV LPGDocument211 pages205 PV LPGf166Pas encore d'évaluation
- Belt Failure AnalysisDocument8 pagesBelt Failure AnalysisDavid ChandlerPas encore d'évaluation
- Chapter (3) Simple Stresses in Machine Parts: Design of Machine Elements I (ME-41031)Document80 pagesChapter (3) Simple Stresses in Machine Parts: Design of Machine Elements I (ME-41031)Dr. Aung Ko LattPas encore d'évaluation
- TMR4190 Finite Element Methods in Structural AnalysisDocument9 pagesTMR4190 Finite Element Methods in Structural AnalysisrenywatanPas encore d'évaluation
- Design and Analysis of Five Cylinder Radial EngineDocument3 pagesDesign and Analysis of Five Cylinder Radial EngineAhmed NawazPas encore d'évaluation
- Aisi Cfsd86Document4 pagesAisi Cfsd86Mahaveer Janapala100% (1)
- Cap 2Document33 pagesCap 2Ricardo Rincon VegaPas encore d'évaluation
- Norsand: Description, Calibration, Validation and ApplicationsDocument38 pagesNorsand: Description, Calibration, Validation and ApplicationsmarcosPas encore d'évaluation