Vous aimerez peut-être aussi
- Calcul D'un Nivellement Direct Par Un Cheminement Fermé V1 Univ OranDocument14 pagesCalcul D'un Nivellement Direct Par Un Cheminement Fermé V1 Univ OranKhalil SinkoPas encore d'évaluation
- TopographieDocument19 pagesTopographieMohamed Oumlabat100% (1)
- Santé Et Sécurité Au TravailDocument122 pagesSanté Et Sécurité Au TravailPierre Henri EPOUPas encore d'évaluation
- Nivellement Par CheminementDocument11 pagesNivellement Par CheminementAnassou soltan100% (4)
- Compte Rendu Du 1er TP TOPODocument10 pagesCompte Rendu Du 1er TP TOPOwalid83% (6)
- TP NDTDocument7 pagesTP NDTSalima Mima100% (1)
- TP NDTDocument7 pagesTP NDTSalima Mima100% (1)
- 1474913817-Polygonation Topographie PDFDocument2 pages1474913817-Polygonation Topographie PDFaissa100% (1)
- Chapitre II - Mesure Des LongueursDocument6 pagesChapitre II - Mesure Des LongueursSarah AmioPas encore d'évaluation
- Cours Topo 3eme GC 2021Document12 pagesCours Topo 3eme GC 2021Haithem Kiassa100% (1)
- TP 02topoDocument10 pagesTP 02topohaniislambenkhiPas encore d'évaluation
- Chapitre 2. PolygonationDocument7 pagesChapitre 2. PolygonationDidaBouchPas encore d'évaluation
- 04b ANGLES HORIZONTAUX VerticauxDocument10 pages04b ANGLES HORIZONTAUX VerticauxAmine Makachou100% (1)
- Nivellement InderctDocument4 pagesNivellement InderctYoussef HouggaaliPas encore d'évaluation
- TOPOGRAPHIE 2 Chap IIDocument21 pagesTOPOGRAPHIE 2 Chap IIFatih IlyezPas encore d'évaluation
- Dérivation Et FonctionDocument201 pagesDérivation Et FonctionThe Best Channel100% (1)
- Leve Et PolygonationDocument13 pagesLeve Et PolygonationmahdouchfkiPas encore d'évaluation
- TP2 PDFDocument14 pagesTP2 PDFSAMed86% (7)
- Camp-Topo PréparatoireDocument18 pagesCamp-Topo PréparatoireNestane Morlende100% (2)
- Angle HorizontaleDocument4 pagesAngle HorizontaleSouri MustafaPas encore d'évaluation
- Topographie 0Document3 pagesTopographie 0bakhosPas encore d'évaluation
- ch6 PLANIMETRIEDocument9 pagesch6 PLANIMETRIEroycunPas encore d'évaluation
- GFCF Outils Et Pilotage de Projets Taf Version FinaleDocument95 pagesGFCF Outils Et Pilotage de Projets Taf Version FinalefzelPas encore d'évaluation
- Résumé Graissage Et LubrificationDocument20 pagesRésumé Graissage Et LubrificationOliver Twiste50% (2)
- Cours Marketing DirectDocument45 pagesCours Marketing DirectMeryem IdbellaPas encore d'évaluation
- TP2 PDFDocument14 pagesTP2 PDFGhayda SghaierPas encore d'évaluation
- Calcul D'un Nivellement Direct Par Un CheminementDocument27 pagesCalcul D'un Nivellement Direct Par Un CheminementMehdi El Melali100% (2)
- Révision TOPODocument6 pagesRévision TOPOMohamed DiopPas encore d'évaluation
- Chapitre 1 PDFDocument17 pagesChapitre 1 PDFSAMedPas encore d'évaluation
- Nivelle MentDocument24 pagesNivelle Mentibrahima khalil sarrPas encore d'évaluation
- Module 5Document8 pagesModule 5Patricia Diaz100% (1)
- Mesure Des AltitudesDocument29 pagesMesure Des AltitudesIchrak KhaldiPas encore d'évaluation
- Nivellement Direct Et IndirectDocument8 pagesNivellement Direct Et IndirectTeo Teg100% (1)
- Chapitre I:: Altimetrie Ou NivellementDocument49 pagesChapitre I:: Altimetrie Ou Nivellementbabacar ndiaye100% (1)
- Chapitre5 Nivellement DirectDocument48 pagesChapitre5 Nivellement DirectfranckPas encore d'évaluation
- TopographieDocument14 pagesTopographieB2H worldPas encore d'évaluation
- Topo - Nivellement Indirect Ou Trigonométrique-Cours1Document4 pagesTopo - Nivellement Indirect Ou Trigonométrique-Cours1Mhamed MEDJHOUD100% (1)
- Nivellement Par CheminementDocument7 pagesNivellement Par CheminementRim NaccachePas encore d'évaluation
- Chapitre8 LEVERSDocument50 pagesChapitre8 LEVERSmahdouchfki100% (1)
- Tracer Manuel Des Courbes de NiveauxDocument2 pagesTracer Manuel Des Courbes de NiveauxhichosenPas encore d'évaluation
- Topo PDFDocument15 pagesTopo PDFchawki talbiPas encore d'évaluation
- Cours de Géodésie - 2ème PartieDocument19 pagesCours de Géodésie - 2ème PartieHamzaGdPas encore d'évaluation
- RakotoarimahefaTojoN ESPA MAST2 17Document144 pagesRakotoarimahefaTojoN ESPA MAST2 17mohamad dialloPas encore d'évaluation
- Lever de DetailsDocument3 pagesLever de DetailsALON?TSIE TANEZOUA ISRAEL100% (1)
- Examen Topo 2016Document13 pagesExamen Topo 2016Rahma AmariPas encore d'évaluation
- Notion Sur La Théorie Des ErreursDocument11 pagesNotion Sur La Théorie Des ErreursAli EmbarecPas encore d'évaluation
- Materil TopographiqueDocument6 pagesMateril TopographiqueRim NaccachePas encore d'évaluation
- Calcul Des CoordonnéesDocument4 pagesCalcul Des CoordonnéesFotso germainPas encore d'évaluation
- Compte Rendu n4 MedhediDocument7 pagesCompte Rendu n4 MedhediBaazaoui Mohamed HediPas encore d'évaluation
- Mise en Station NiveauDocument8 pagesMise en Station NiveauMohamed GhribPas encore d'évaluation
- TP N 3: Levé Altimétrique Par RayonnementDocument2 pagesTP N 3: Levé Altimétrique Par RayonnementMahamat Nour Yaya AbakarPas encore d'évaluation
- Niveau Lectures MireDocument20 pagesNiveau Lectures Mirevieu2Pas encore d'évaluation
- Nivellement Indirect 12Document2 pagesNivellement Indirect 12hadjer amel Dehini0% (2)
- Le Nivellement Indirect: 1. Le Principe (Courte Distance)Document9 pagesLe Nivellement Indirect: 1. Le Principe (Courte Distance)Azedine ChitouraPas encore d'évaluation
- 07 - Procedés de Levé PlanimétriqueDocument12 pages07 - Procedés de Levé PlanimétriqueMaatallah Hajamor100% (1)
- TP Topographie À Imprimer - CopieDocument13 pagesTP Topographie À Imprimer - CopieFilipo Joseph100% (1)
- Cours 02: Mesures AngulairesDocument16 pagesCours 02: Mesures AngulairesFatih Ilyez100% (1)
- Mesurage Des AnglesDocument4 pagesMesurage Des AnglesALON?TSIE TANEZOUA ISRAELPas encore d'évaluation
- TD #3: Mesure Des Distances Exercice N°1:: LR LR LRDocument6 pagesTD #3: Mesure Des Distances Exercice N°1:: LR LR LRMzoughi Haythem100% (1)
- Rapport Du TP de La TopographieDocument10 pagesRapport Du TP de La TopographieYahya FdPas encore d'évaluation
- TD N°2Document4 pagesTD N°2Boubou Sãleh Cissə0% (1)
- Résolution de Triangles.Document2 pagesRésolution de Triangles.Luigi67% (3)
- TP de 79Document11 pagesTP de 79haniislambenkhiPas encore d'évaluation
- Nivellement Indirect, Point NodalDocument3 pagesNivellement Indirect, Point NodalJean Eudes100% (1)
- Nivelle MentDocument24 pagesNivelle MentMatar KanePas encore d'évaluation
- Chapitre V - NivellementDocument10 pagesChapitre V - Nivellementfatimaajouid2024Pas encore d'évaluation
- Chapitre Nivellement DirectDocument2 pagesChapitre Nivellement DirectChrisby PatsaPas encore d'évaluation
- Chapitre 5Document2 pagesChapitre 5Belal FaridPas encore d'évaluation
- Chapitre 4Document4 pagesChapitre 4Belal FaridPas encore d'évaluation
- French 3am19 3trim3Document2 pagesFrench 3am19 3trim3Belal FaridPas encore d'évaluation
- Leau Dans Le SolDocument10 pagesLeau Dans Le SolBelal FaridPas encore d'évaluation
- FeuilletageDocument13 pagesFeuilletageBelal FaridPas encore d'évaluation
- MDS L2Document50 pagesMDS L2Belal FaridPas encore d'évaluation
- TP Flexion - 001Document9 pagesTP Flexion - 001Belal FaridPas encore d'évaluation
- TP01Document5 pagesTP01Belal FaridPas encore d'évaluation
- EFS Phys3 2013 SolutionDocument5 pagesEFS Phys3 2013 SolutionBelal FaridPas encore d'évaluation
- Essai de Pénétration Dynamique (DPT) - 001Document8 pagesEssai de Pénétration Dynamique (DPT) - 001Belal FaridPas encore d'évaluation
- Masses Volumiques - 001Document4 pagesMasses Volumiques - 001Belal FaridPas encore d'évaluation
- Ratt Proba - Stat 2020-2021Document1 pageRatt Proba - Stat 2020-2021Belal FaridPas encore d'évaluation
- Série TD3Document2 pagesSérie TD3Belal FaridPas encore d'évaluation
- MDS - TP.N3 Essai OedométriqueDocument7 pagesMDS - TP.N3 Essai OedométriqueBelal Farid100% (1)
- Partiei Chapitre 02Document16 pagesPartiei Chapitre 02Ammar AmiourPas encore d'évaluation
- Concistance Du Beton Cone AbramsDocument3 pagesConcistance Du Beton Cone AbramsPedro Mendoza BarriosPas encore d'évaluation
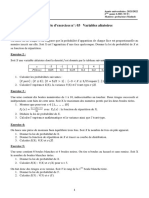
- Examen1 Mathématique 3 2021 MédéaDocument4 pagesExamen1 Mathématique 3 2021 MédéaMartial YobodePas encore d'évaluation
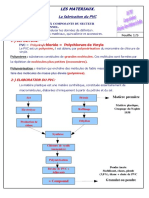
- La Fabrication Du PVCDocument7 pagesLa Fabrication Du PVCbouzbidPas encore d'évaluation
- CatalogueDocument6 pagesCatalogueBelal FaridPas encore d'évaluation
- La Fabrication Du PVCDocument7 pagesLa Fabrication Du PVCbouzbidPas encore d'évaluation
- Cours Composite Partie 1Document8 pagesCours Composite Partie 1Belal FaridPas encore d'évaluation
- FicheTox 291Document14 pagesFicheTox 291ghodbanePas encore d'évaluation
- Polymere PVCDocument5 pagesPolymere PVCHå MźãPas encore d'évaluation
- Montagnese Tony SMZ0639Document3 pagesMontagnese Tony SMZ0639Belal FaridPas encore d'évaluation
- Introduction S2Document6 pagesIntroduction S2Belal FaridPas encore d'évaluation
- Introduction S2Document21 pagesIntroduction S2Belal FaridPas encore d'évaluation
- Aspects Réglementaire BPF Et Organisationnel D'un Laboratoire de Contrôle de Qualité 1Document48 pagesAspects Réglementaire BPF Et Organisationnel D'un Laboratoire de Contrôle de Qualité 1lola benrPas encore d'évaluation
- Mémoire CorrigéDocument99 pagesMémoire CorrigéGUELLIL SidaliPas encore d'évaluation
- Chapitre 02Document15 pagesChapitre 02OumaimaPas encore d'évaluation
- Devoir & Corrigé 1 Lycée de Moukoundzi NgouakaDocument4 pagesDevoir & Corrigé 1 Lycée de Moukoundzi NgouakagimeymouandaPas encore d'évaluation
- Chapitre 2 Avec Exercices-Systèmes Non-LinéairesDocument13 pagesChapitre 2 Avec Exercices-Systèmes Non-LinéairesmohamedPas encore d'évaluation
- Les Equations Algebriques - Aborder Les Inconnues-Par - (-WWW - Heights-Book - Blogspot.com-)Document164 pagesLes Equations Algebriques - Aborder Les Inconnues-Par - (-WWW - Heights-Book - Blogspot.com-)Houcinebeladjat BeladjatPas encore d'évaluation
- ABHBC Etat de Qualite 2010-2011Document21 pagesABHBC Etat de Qualite 2010-2011Nahli Abdel MottalibPas encore d'évaluation
- Droit de La Propriete Intellectuelle DavidDocument38 pagesDroit de La Propriete Intellectuelle DavidNathanael AbandaPas encore d'évaluation
- REVENUS 2021: Investissements Outre-MerDocument8 pagesREVENUS 2021: Investissements Outre-Mer6edgeePas encore d'évaluation
- IPT MPSI DS4 CorrigeDocument12 pagesIPT MPSI DS4 CorrigeSwayziiPas encore d'évaluation
- Rapport Stage Version Finale - Mohamed HamdiDocument47 pagesRapport Stage Version Finale - Mohamed HamdiMohamed HAMDIPas encore d'évaluation
- But de La ManipulationDocument9 pagesBut de La ManipulationBargui NadaPas encore d'évaluation
- A I1108f PDFDocument79 pagesA I1108f PDFWafa AjiliPas encore d'évaluation
- Mémoire Corrigé Didier BIAOU 26-06-2021Document140 pagesMémoire Corrigé Didier BIAOU 26-06-2021Kocouvi Agapi HouanouPas encore d'évaluation
- Série 01Document2 pagesSérie 01sdfgkePas encore d'évaluation
- LINERDocument9 pagesLINERFa TehPas encore d'évaluation
- Repertoire Milieux Septembre 2023Document162 pagesRepertoire Milieux Septembre 2023brandonssh91Pas encore d'évaluation
- Plaquette CMC Conception Métallique ChaudronnerieDocument2 pagesPlaquette CMC Conception Métallique Chaudronneriendobra-1Pas encore d'évaluation
- 1ére Année OrganisationDocument72 pages1ére Année OrganisationTaha CanPas encore d'évaluation
- Formation D'Equipier de Sapeur-Pompier: Livre 1 - TransverseDocument149 pagesFormation D'Equipier de Sapeur-Pompier: Livre 1 - TransverseMathis BENOISPas encore d'évaluation
- Laghouasli Azrif 2019Document58 pagesLaghouasli Azrif 2019mohamedPas encore d'évaluation
- CV TEBI Modif-1Document3 pagesCV TEBI Modif-1Eba Jean aymardPas encore d'évaluation
- TD No 2 de Tle D TOSDocument2 pagesTD No 2 de Tle D TOSBertino DidahPas encore d'évaluation
- 2as Ge MTDocument3 pages2as Ge MTMamoun BelkacemPas encore d'évaluation
- 2 Energieinterneenthalpie PDFDocument1 page2 Energieinterneenthalpie PDFالغزيزال الحسن EL GHZIZAL HassanePas encore d'évaluation