Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Nickel-Titanium Alloys: A Systematic Review: Original ArticleDocument12 pagesNickel-Titanium Alloys: A Systematic Review: Original ArticleMudavath BaburamPas encore d'évaluation
- The DSPRCDFMT Utility Version 2.0Document9 pagesThe DSPRCDFMT Utility Version 2.0rachmat99Pas encore d'évaluation
- Hero Forge: 3D Printed Miniature Care and Painting GuideDocument4 pagesHero Forge: 3D Printed Miniature Care and Painting GuideDanilo FirminoPas encore d'évaluation
- Taipei 102Document2 pagesTaipei 102militansinaPas encore d'évaluation
- Wood Magazine Issue #189Document96 pagesWood Magazine Issue #189bangbang63100% (1)
- Lab Gas FlowmeterDocument7 pagesLab Gas Flowmeterazym94Pas encore d'évaluation
- Various Allowances Referred To 7th CPCDocument73 pagesVarious Allowances Referred To 7th CPCGiri KumarPas encore d'évaluation
- Pile Cap Design 4pilesDocument6 pagesPile Cap Design 4pilesabshawPas encore d'évaluation
- KYK CatalogueDocument94 pagesKYK Cataloguepriya kumariPas encore d'évaluation
- Aurora: AE MC-120 SeriesDocument2 pagesAurora: AE MC-120 SeriestasoPas encore d'évaluation
- SYNC2000 - 4.00.022014 Protocol ConverterDocument2 pagesSYNC2000 - 4.00.022014 Protocol ConverterAnasSalemPas encore d'évaluation
- Metco 16C 10-040Document8 pagesMetco 16C 10-040JSH100Pas encore d'évaluation
- Material Test Report: ISO EN 10204 2004-3.1Document4 pagesMaterial Test Report: ISO EN 10204 2004-3.1Johan Sebastian C. SPas encore d'évaluation
- Key Features Boilermaker Proven, Legendary ReliabilityDocument2 pagesKey Features Boilermaker Proven, Legendary ReliabilityManuel Cantoral CortazarPas encore d'évaluation
- Polymers For Transdermal Drug Delivery SystemsDocument9 pagesPolymers For Transdermal Drug Delivery SystemsAmjadRazaPas encore d'évaluation
- State of Patriot MissilesDocument13 pagesState of Patriot MissilesTaira Mai100% (1)
- 04 Surveys Cattell PDFDocument16 pages04 Surveys Cattell PDFBrenda MaggPas encore d'évaluation
- (Communication) (English E-Book) Scientific Writing PDFDocument5 pages(Communication) (English E-Book) Scientific Writing PDFIrinaPas encore d'évaluation
- TK-C Transmitter PDFDocument4 pagesTK-C Transmitter PDFGopal HegdePas encore d'évaluation
- Forming ProcessesDocument8 pagesForming ProcessesKishor PatilPas encore d'évaluation
- 4 Contamination Control 2Document61 pages4 Contamination Control 2Vijay RajaindranPas encore d'évaluation
- ECE320 Chapter 3 PDFDocument23 pagesECE320 Chapter 3 PDFAhsan NisarPas encore d'évaluation
- WPH02 01 Que 20150604Document28 pagesWPH02 01 Que 20150604ArniePas encore d'évaluation
- Uptake and Distribution of Inhalational AnaestheticsDocument125 pagesUptake and Distribution of Inhalational Anaestheticsharsha mummakaPas encore d'évaluation
- Imp For As400Document21 pagesImp For As400Dinesh ChaudhariPas encore d'évaluation
- Control Unit ECUDocument2 pagesControl Unit ECUjag1961Pas encore d'évaluation
- PPAPDocument2 pagesPPAPVlad NitaPas encore d'évaluation
- Method Statement of Pipeline WorksDocument13 pagesMethod Statement of Pipeline Worksमनिसभेटुवाल86% (21)
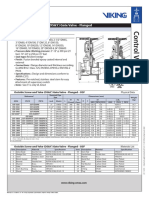
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDocument2 pagesOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoPas encore d'évaluation
- B747F 400Document2 pagesB747F 400Nadeem100% (1)