Vous aimerez peut-être aussi
- Error-Correction on Non-Standard Communication ChannelsD'EverandError-Correction on Non-Standard Communication ChannelsPas encore d'évaluation
- Channel Estimation EJSR 70-1-04Document8 pagesChannel Estimation EJSR 70-1-04حاتم الشرڭيPas encore d'évaluation
- Ec-202c - Adc Unit-5 - NotesDocument22 pagesEc-202c - Adc Unit-5 - NotesshivaniPas encore d'évaluation
- High SNR Analysis For MIMO Broadcast Channels: Dirty Paper Coding vs. Linear PrecodingDocument33 pagesHigh SNR Analysis For MIMO Broadcast Channels: Dirty Paper Coding vs. Linear Precodingkumaar1943Pas encore d'évaluation
- Ofdm Channel Estimation by Singular Value Decomposition: Abstract - A New Approach To Low-Complexity ChanDocument5 pagesOfdm Channel Estimation by Singular Value Decomposition: Abstract - A New Approach To Low-Complexity ChanAlexandro PendosilioPas encore d'évaluation
- A Chaotic Direct-Sequence Spread-Spectrum Communication SystemDocument4 pagesA Chaotic Direct-Sequence Spread-Spectrum Communication SystemNhan BuiPas encore d'évaluation
- Selection Based Successive Interference Cancellation For Multicode Multicarrier CDMA TransceiverDocument10 pagesSelection Based Successive Interference Cancellation For Multicode Multicarrier CDMA TransceiverTru Dinh QuocPas encore d'évaluation
- Baseband Data Transmissions: 5.1 ObjectiveDocument25 pagesBaseband Data Transmissions: 5.1 ObjectiveIulian NeagaPas encore d'évaluation
- Performance Analysis of Multicarrier DS-CDMA System Using BPSK ModulationDocument7 pagesPerformance Analysis of Multicarrier DS-CDMA System Using BPSK ModulationiaetsdiaetsdPas encore d'évaluation
- Multichannel Linear EqualisersDocument4 pagesMultichannel Linear EqualisersIbrahim ÖzkanPas encore d'évaluation
- A Conceptual Study of OFDM-based Multiple Access SchemesDocument7 pagesA Conceptual Study of OFDM-based Multiple Access SchemeswoodksdPas encore d'évaluation
- Final Research Paper On Cdma Signalling Technique Using MatlabDocument6 pagesFinal Research Paper On Cdma Signalling Technique Using MatlabArpit AgarwalPas encore d'évaluation
- BB 06 SpreadSpectrum PDFDocument59 pagesBB 06 SpreadSpectrum PDFjmPas encore d'évaluation
- A Systematic Approach To Peak-to-Average Power Ratio in OFDMDocument11 pagesA Systematic Approach To Peak-to-Average Power Ratio in OFDMWaled Fouad GaberPas encore d'évaluation
- Spread Spectrum SystemsDocument17 pagesSpread Spectrum SystemsAnonymous H0SJWZE8Pas encore d'évaluation
- (1967) Digital Pulse Compression Radar ReceiverDocument9 pages(1967) Digital Pulse Compression Radar ReceiverAlex YangPas encore d'évaluation
- 0010 Praes AECDocument5 pages0010 Praes AECPradeep Poduval K PPas encore d'évaluation
- Channel ModelsDocument14 pagesChannel ModelssameerPas encore d'évaluation
- Maximum Ratio Combining For A WCDMA Rake ReceiverDocument8 pagesMaximum Ratio Combining For A WCDMA Rake ReceivertycoonaPas encore d'évaluation
- Iterative Multiuser Detection Vigoda SummaryDocument18 pagesIterative Multiuser Detection Vigoda SummaryMohammed Fatehy SolimanPas encore d'évaluation
- Performance of Mimo-Ofdm System For Rayleigh Fading Channel: Pallavi Bhatnagar, Jaikaran Singh, Mukesh TiwariDocument4 pagesPerformance of Mimo-Ofdm System For Rayleigh Fading Channel: Pallavi Bhatnagar, Jaikaran Singh, Mukesh TiwariNebiye SolomonPas encore d'évaluation
- v-BLAST - An Architecture For Realizing Very High Data Rates Over The Rich-Scattering Wireless ChannelDocument6 pagesv-BLAST - An Architecture For Realizing Very High Data Rates Over The Rich-Scattering Wireless ChannelSharanya VaidyanathPas encore d'évaluation
- Ubicc 200 200Document7 pagesUbicc 200 200Ubiquitous Computing and Communication JournalPas encore d'évaluation
- Speaker Verification Rate Study Using The TESPAR Coding MethodDocument6 pagesSpeaker Verification Rate Study Using The TESPAR Coding MethodLevente CzumbilPas encore d'évaluation
- Maximum Ratio Transmission: Titus K. Y. LoDocument4 pagesMaximum Ratio Transmission: Titus K. Y. LoButtordPas encore d'évaluation
- The Performance Analysis of Non-Primitive Turbo Codes in MIMO System Over Flat Fading ChannelDocument4 pagesThe Performance Analysis of Non-Primitive Turbo Codes in MIMO System Over Flat Fading ChannelTra LePas encore d'évaluation
- Transmitter and ReceiverDocument28 pagesTransmitter and ReceiverVinod NayyarPas encore d'évaluation
- PN Sequence GeneratorDocument7 pagesPN Sequence GeneratorTanvir Manhotra0% (1)
- Interview Topic-3Document5 pagesInterview Topic-3LeelaPas encore d'évaluation
- Spread Spectrum Communication LabDocument15 pagesSpread Spectrum Communication Labmegatron5858Pas encore d'évaluation
- BB 5Document23 pagesBB 5samuelPas encore d'évaluation
- Wireless Communication - EC 2401 - I - Answer KeyDocument9 pagesWireless Communication - EC 2401 - I - Answer KeySriramPas encore d'évaluation
- Amount of Fading RevisitedDocument23 pagesAmount of Fading RevisitedMurthy NarasimhaPas encore d'évaluation
- Sparse Multipath Wireless Channels: Modeling and ImplicationsDocument6 pagesSparse Multipath Wireless Channels: Modeling and ImplicationsDinesh KanojiyaPas encore d'évaluation
- Matched Filtering and Timing Recovery in Digital Receivers - Match Filter, Timing RecoveryDocument8 pagesMatched Filtering and Timing Recovery in Digital Receivers - Match Filter, Timing Recoveryjoe2001coolPas encore d'évaluation
- MIMO Channel Estimation Using The LS and MMSE Algorithm: Mohammed Ali Mohammed MOQBEL, Wangdong, Al-Marhabi Zaid AliDocument10 pagesMIMO Channel Estimation Using The LS and MMSE Algorithm: Mohammed Ali Mohammed MOQBEL, Wangdong, Al-Marhabi Zaid AliKoustab MaityPas encore d'évaluation
- Channel Equalization Techniques For Wireless Communications SystemsDocument42 pagesChannel Equalization Techniques For Wireless Communications SystemsLove IsPas encore d'évaluation
- An Efficient Channel Equalizer Using Artificial Neural NetworksDocument10 pagesAn Efficient Channel Equalizer Using Artificial Neural Networksamreshjha22Pas encore d'évaluation
- Digital CommunicationsDocument86 pagesDigital CommunicationspravalikaPas encore d'évaluation
- On Timing Offset and Frequency Offset Estimation in LTE UplinkDocument10 pagesOn Timing Offset and Frequency Offset Estimation in LTE UplinkAjay SharmaPas encore d'évaluation
- Study Spread Spectrum in Matlab: Wang XiaoyingDocument4 pagesStudy Spread Spectrum in Matlab: Wang XiaoyingAli KashiPas encore d'évaluation
- Study On Noise ReductionDocument14 pagesStudy On Noise ReductionMd. Sharif Uddin ShajibPas encore d'évaluation
- MIMO Systems and Channel Models ProposalDocument11 pagesMIMO Systems and Channel Models ProposalAhmed HwaidiPas encore d'évaluation
- Bandwidth Scaling in Ultra Wideband Communication: Gallager (3) and Separately by Subramanian and HajekDocument10 pagesBandwidth Scaling in Ultra Wideband Communication: Gallager (3) and Separately by Subramanian and HajekAnshoriRudiPas encore d'évaluation
- System With Linear-Phase Transmultiplexer: Seog Geun Kang Eon Kyeong JooDocument2 pagesSystem With Linear-Phase Transmultiplexer: Seog Geun Kang Eon Kyeong Jooskh_1987Pas encore d'évaluation
- On Channel Estimation in OFDM SystemsDocument5 pagesOn Channel Estimation in OFDM SystemsSoumitra BhowmickPas encore d'évaluation
- Performance Analysis of Decode-and-Forward Relay Network Under Adaptive M-QAMDocument5 pagesPerformance Analysis of Decode-and-Forward Relay Network Under Adaptive M-QAMballmerPas encore d'évaluation
- Libshitz, S. P., Vanderkooy, J. - Pulse Code Modulation An OverviewDocument16 pagesLibshitz, S. P., Vanderkooy, J. - Pulse Code Modulation An OverviewMartinAggrowePas encore d'évaluation
- Channel Coding Strategies For Cellular RadioDocument15 pagesChannel Coding Strategies For Cellular Radioarjuna1210Pas encore d'évaluation
- UBvhinostroza 128Document8 pagesUBvhinostroza 128Ubiquitous Computing and Communication JournalPas encore d'évaluation
- (1997) An Analysis of Two-Dimensional Pilot-Symbol Assisted Modulation For OFDMDocument4 pages(1997) An Analysis of Two-Dimensional Pilot-Symbol Assisted Modulation For OFDM賴勇先Pas encore d'évaluation
- S-38.220 Licentiate Course On Signal Processing in Communications, FALL - 97Document15 pagesS-38.220 Licentiate Course On Signal Processing in Communications, FALL - 97Shabeeb Ali OruvangaraPas encore d'évaluation
- Unit-3 Diversity Techniques: (1) Repetition Coding and Time DiversityDocument14 pagesUnit-3 Diversity Techniques: (1) Repetition Coding and Time DiversityRakesh DevallaPas encore d'évaluation
- MC-CDMA With Quadrature Spreading For Wireless Communication SystemsDocument25 pagesMC-CDMA With Quadrature Spreading For Wireless Communication SystemsNageswara Rao ChallaPas encore d'évaluation
- Channel Estimation For Adaptive Frequency-Domain EqualizationDocument11 pagesChannel Estimation For Adaptive Frequency-Domain Equalizationअमरेश झाPas encore d'évaluation
- Term Paper On The Compressive Sensing Based On Biorthogonal Wavelet BasisDocument12 pagesTerm Paper On The Compressive Sensing Based On Biorthogonal Wavelet BasisdwipradPas encore d'évaluation
- Fast Fourier Transform of Frequency Hopping Spread Spectrum in Noisy EnvironmentDocument5 pagesFast Fourier Transform of Frequency Hopping Spread Spectrum in Noisy EnvironmentNaveed RamzanPas encore d'évaluation
- Performance Evaluation of Ds-Cdma System Using MatlabDocument13 pagesPerformance Evaluation of Ds-Cdma System Using MatlabMuhammad FirdausPas encore d'évaluation
- Frequency Domain Techniques For Void Spectrum Detection in Cognitive Radio NetworkDocument20 pagesFrequency Domain Techniques For Void Spectrum Detection in Cognitive Radio NetworkPRANAV KUMAR 17BEC0473Pas encore d'évaluation
- Konica Minolta: Basics of Printer Driver & UI ComparisonDocument8 pagesKonica Minolta: Basics of Printer Driver & UI ComparisonSiddhartha DasPas encore d'évaluation
- Phase ApproachDocument47 pagesPhase ApproachSiddhartha DasPas encore d'évaluation
- A Detailed Report On Methods For Azimuth and Range Estimation Based On Phase MeasurementsDocument21 pagesA Detailed Report On Methods For Azimuth and Range Estimation Based On Phase MeasurementsSiddhartha DasPas encore d'évaluation
- The Agriculture RobotDocument1 pageThe Agriculture RobotSiddhartha DasPas encore d'évaluation
- HUL286-Term PaperDocument31 pagesHUL286-Term PaperSiddhartha DasPas encore d'évaluation
- A 1-Eel306Document21 pagesA 1-Eel306Siddhartha DasPas encore d'évaluation
- MOS MemoryDocument53 pagesMOS Memoryskh_1987100% (1)
- IEC61850 External Box Manual enDocument15 pagesIEC61850 External Box Manual enIchim NasuiPas encore d'évaluation
- Zener DRDocument4 pagesZener DRArchana SadanandanPas encore d'évaluation
- The Electric Motor IIDocument6 pagesThe Electric Motor IIGray Fox GarcíaPas encore d'évaluation
- Manual de Usuario Autoestereo Power Acoustik PD-710Document25 pagesManual de Usuario Autoestereo Power Acoustik PD-710Angel ContrerasPas encore d'évaluation
- Huawei Esight Hardware Installation Guide (N610E) (V200R002C00 - 01) PDFDocument26 pagesHuawei Esight Hardware Installation Guide (N610E) (V200R002C00 - 01) PDFAdolfo2009Pas encore d'évaluation
- Abhiraman S - MC AssignmentDocument18 pagesAbhiraman S - MC AssignmentViswanath K ReddyPas encore d'évaluation
- Basic Passive RC FiltersDocument44 pagesBasic Passive RC FiltersJohnPJojoPas encore d'évaluation
- SE250SM-Ce (1) - User ManualDocument10 pagesSE250SM-Ce (1) - User ManualJoão Francisco MontanhaniPas encore d'évaluation
- Eee 14Document152 pagesEee 14tjpkPas encore d'évaluation
- Liebert GXT3-10000T230 Parallel System GuideDocument4 pagesLiebert GXT3-10000T230 Parallel System GuideEdgardo A. MamaniPas encore d'évaluation
- 45 Watt ClassDocument5 pages45 Watt Classfirmansyah miraddanaPas encore d'évaluation
- Electrical Powerircuit - Test..Document10 pagesElectrical Powerircuit - Test..Anonymous 86w3RKPas encore d'évaluation
- Tehman Alam Siddiqui CVDocument2 pagesTehman Alam Siddiqui CVMuhammad Haris BaigPas encore d'évaluation
- QUIZ 2: Design Your Own Solar Cell:: Optimizing $/WDocument7 pagesQUIZ 2: Design Your Own Solar Cell:: Optimizing $/WmusaPas encore d'évaluation
- Kirisun PT8100-Service-ManualDocument35 pagesKirisun PT8100-Service-ManualRobertino100% (1)
- Brocade 3800 HW Reference ManualDocument62 pagesBrocade 3800 HW Reference ManualGalip KuyukPas encore d'évaluation
- Gatee Security Using Rasberry PiDocument5 pagesGatee Security Using Rasberry PiIsaq ShikalgarPas encore d'évaluation
- AO4466 N-Channel Enhancement Mode Field Effect Transistor: Features General DescriptionDocument4 pagesAO4466 N-Channel Enhancement Mode Field Effect Transistor: Features General DescriptionErick V. BlancoPas encore d'évaluation
- GEC Thrissur KTU Results B.Tech S1 (S) Exam July 2019Document6 pagesGEC Thrissur KTU Results B.Tech S1 (S) Exam July 2019Anonymous DbmKEDxPas encore d'évaluation
- Unit-3 PsocDocument23 pagesUnit-3 PsocDESI BRAHMNPas encore d'évaluation
- Datenblatt Simatic S7-1200-EnDocument8 pagesDatenblatt Simatic S7-1200-EnHarold MendozaPas encore d'évaluation
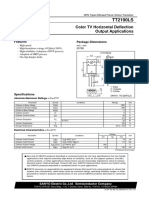
- TT2190LS: Color TV Horizontal Deflection Output ApplicationsDocument4 pagesTT2190LS: Color TV Horizontal Deflection Output ApplicationsFreddyPas encore d'évaluation
- MICRO3Manual PDFDocument234 pagesMICRO3Manual PDFNekolePas encore d'évaluation
- ICEM, Department of MechanicalenggDocument3 pagesICEM, Department of MechanicalenggDHIRAJ ANAND SHINDEPas encore d'évaluation
- Microwave Treatment in Oil Refining PDFDocument8 pagesMicrowave Treatment in Oil Refining PDFRonikaGoswamiPas encore d'évaluation
- Classification of Incandescent BulbDocument31 pagesClassification of Incandescent BulbLorica John LuisPas encore d'évaluation
- Approaches To The Qualification of CPS Drive SHEM-3 For Hanhikivi-1 NPPDocument18 pagesApproaches To The Qualification of CPS Drive SHEM-3 For Hanhikivi-1 NPPLau SilvaPas encore d'évaluation
- Nerl Work ShopDocument237 pagesNerl Work ShopRatan KotipalliPas encore d'évaluation
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsD'EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsPas encore d'évaluation
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.D'EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Évaluation : 5 sur 5 étoiles5/5 (2)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxD'EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (67)
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationD'EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationÉvaluation : 5 sur 5 étoiles5/5 (2)
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)D'EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Évaluation : 4 sur 5 étoiles4/5 (4)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsD'EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsÉvaluation : 5 sur 5 étoiles5/5 (1)
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationD'EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationPas encore d'évaluation
- AWS Certified Solutions Architect Study Guide: Associate SAA-C01 ExamD'EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C01 ExamÉvaluation : 4 sur 5 étoiles4/5 (1)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionD'EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionÉvaluation : 5 sur 5 étoiles5/5 (4)
- Palo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsD'EverandPalo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsPas encore d'évaluation
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsD'EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsPas encore d'évaluation
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPND'EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNÉvaluation : 5 sur 5 étoiles5/5 (1)
- Cybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityD'EverandCybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityÉvaluation : 5 sur 5 étoiles5/5 (2)
- CWNA Certified Wireless Network Administrator Study Guide: Exam CWNA-108D'EverandCWNA Certified Wireless Network Administrator Study Guide: Exam CWNA-108Pas encore d'évaluation
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamD'EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamÉvaluation : 5 sur 5 étoiles5/5 (1)
- Practical TCP/IP and Ethernet Networking for IndustryD'EverandPractical TCP/IP and Ethernet Networking for IndustryÉvaluation : 4 sur 5 étoiles4/5 (2)
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringD'EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringÉvaluation : 5 sur 5 étoiles5/5 (40)
- Networking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366D'EverandNetworking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Pas encore d'évaluation