Vous aimerez peut-être aussi
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Cours 4 S Technologique TunisieDocument312 pagesCours 4 S Technologique Tunisiemechergui92% (12)
- TD AsservissementDocument8 pagesTD AsservissementArmand EssPas encore d'évaluation
- TD1 Regulation IndustrielleDocument8 pagesTD1 Regulation IndustrielleZakaria BencherkiPas encore d'évaluation
- AC DC AC AC Electronique de Puissance L2 S1Document52 pagesAC DC AC AC Electronique de Puissance L2 S1Leila Fakhfakh100% (1)
- AC DC AC AC Electronique de Puissance L2 S1Document52 pagesAC DC AC AC Electronique de Puissance L2 S1Leila Fakhfakh100% (1)
- TD01 Asservissements 1Document10 pagesTD01 Asservissements 1fekielyes100% (1)
- TD AsservissementDocument8 pagesTD AsservissementMohamed OuddourPas encore d'évaluation
- TD 2 AutomatiqueDocument12 pagesTD 2 AutomatiqueNawres AbbessiPas encore d'évaluation
- Dimensionnement TransfoDocument3 pagesDimensionnement TransfoAlpha DialloPas encore d'évaluation
- Chapitre 1 Presentation Informatique Industrielle Systemes Micro ProgrammesDocument6 pagesChapitre 1 Presentation Informatique Industrielle Systemes Micro ProgrammesMedPas encore d'évaluation
- Moteur A Courant Continu PDFDocument8 pagesMoteur A Courant Continu PDFSamir MichaelPas encore d'évaluation
- TP Capteurs GE-GIM - s2c - GuerbaouiDocument6 pagesTP Capteurs GE-GIM - s2c - GuerbaouiBoukhems Hamza100% (4)
- Ci22 TD Mas Onduleur Tramway DijonDocument4 pagesCi22 TD Mas Onduleur Tramway DijonkamalPas encore d'évaluation
- La Mesure D'isolementDocument50 pagesLa Mesure D'isolementAbd Ou100% (1)
- Manuel SITRANS F M MAG 5100W PDFDocument72 pagesManuel SITRANS F M MAG 5100W PDFHaroldPas encore d'évaluation
- Ds2003 2Document3 pagesDs2003 2bayebiramaniassePas encore d'évaluation
- Ds2003 1Document2 pagesDs2003 1bayebiramaniassePas encore d'évaluation
- TD asservissementDocument4 pagesTD asservissementGhaffari WalidPas encore d'évaluation
- Aucun Document N'est AutoriséDocument3 pagesAucun Document N'est AutorisébayebiramaniassePas encore d'évaluation
- Ds2004 1Document2 pagesDs2004 1bayebiramaniassePas encore d'évaluation
- Exercice 8: Arbre de C de La Transmission À Variation Continue Vario-Fendt 1. PrésentationDocument2 pagesExercice 8: Arbre de C de La Transmission À Variation Continue Vario-Fendt 1. PrésentationRęnaūd NgùemaPas encore d'évaluation
- TD CommandeDocument3 pagesTD CommandeilyPas encore d'évaluation
- TP Commande PDFDocument9 pagesTP Commande PDFAmdjed Kasri100% (1)
- AssLin ExercicesDocument4 pagesAssLin Exerciceslacoth50% (2)
- TD AsservissementDocument9 pagesTD AsservissementAyoub ELJAFRYPas encore d'évaluation
- TD Commande Machines ENPDocument4 pagesTD Commande Machines ENPMaestro SaberPas encore d'évaluation
- Ments 2Document4 pagesMents 2ELmokhtar HamrouniPas encore d'évaluation
- Comel TDDocument6 pagesComel TDhakimPas encore d'évaluation
- TD1 Ge1 ArcDocument6 pagesTD1 Ge1 Arcfakhri menjliPas encore d'évaluation
- TP 2 - MISE - ELT - Ind - M1Document2 pagesTP 2 - MISE - ELT - Ind - M1Bousmaha YoucefPas encore d'évaluation
- Tdndeg2ok - Regulation.ind .3elm PDFDocument3 pagesTdndeg2ok - Regulation.ind .3elm PDFOmar SltPas encore d'évaluation
- TD1 Met303Document2 pagesTD1 Met303Luka MadridPas encore d'évaluation
- MPauto 21 22 SujetaDocument9 pagesMPauto 21 22 SujetaRanim JOUINIPas encore d'évaluation
- Alim StabDocument4 pagesAlim StabmoimePas encore d'évaluation
- P8 Projet AntenneDocument9 pagesP8 Projet AntenneNadir TenKaichiPas encore d'évaluation
- (Annales 3GE) (ETEP1) (DS) 2014 SDocument5 pages(Annales 3GE) (ETEP1) (DS) 2014 SHamza SadikPas encore d'évaluation
- TD Asservissements-Robdrive - Série 4-RSDocument8 pagesTD Asservissements-Robdrive - Série 4-RSSoufiane AzikiPas encore d'évaluation
- Antenne Radar PDFDocument6 pagesAntenne Radar PDFAya AbPas encore d'évaluation
- TP AutomatiqueDocument1 pageTP AutomatiqueAbdullah Al-sharabiPas encore d'évaluation
- TP 3-ManipDocument2 pagesTP 3-ManipAmina ChelloumPas encore d'évaluation
- Onduleurs Et Variation de Vitesse PSIMDocument9 pagesOnduleurs Et Variation de Vitesse PSIMdarknight100% (1)
- BTS PHY 98 BisDocument7 pagesBTS PHY 98 BiskernoPas encore d'évaluation
- TD3 Ge1 ArcDocument3 pagesTD3 Ge1 Arcfakhri menjliPas encore d'évaluation
- Evaluation Finale S2 Automatique 2022Document4 pagesEvaluation Finale S2 Automatique 2022OMAR RAHALIPas encore d'évaluation
- Ds2002 2Document4 pagesDs2002 2Jean CorreaPas encore d'évaluation
- td2 - GI - M1 - Math Pour Auto 2019 - 2020Document2 pagestd2 - GI - M1 - Math Pour Auto 2019 - 2020Rachid Achit100% (1)
- Ats 1998Document8 pagesAts 1998Dl OramPas encore d'évaluation
- Asservissement D'un Vérin ÉlectriqueDocument6 pagesAsservissement D'un Vérin Électriquepeace.oumaimaPas encore d'évaluation
- BTS Phy 98Document11 pagesBTS Phy 98Abdoul Goudoussy DialloPas encore d'évaluation
- Exer Chap1 AsservDocument6 pagesExer Chap1 AsservIbtissam Et-taoutiPas encore d'évaluation
- TP 4Document5 pagesTP 4Amal FatouhPas encore d'évaluation
- TD 4Document2 pagesTD 4hdjs5Pas encore d'évaluation
- Exam Cin 2 R22 Rattrapage 2Document11 pagesExam Cin 2 R22 Rattrapage 2elisatorres83500Pas encore d'évaluation
- TD N2Document5 pagesTD N2Faical MalaliPas encore d'évaluation
- TP 6Document8 pagesTP 6Alex PefirekoPas encore d'évaluation
- Tpi3a-V0 0Document4 pagesTpi3a-V0 0bananaadams7Pas encore d'évaluation
- Apsim 10 AsservissementDocument3 pagesApsim 10 Asservissementsalma ait aliPas encore d'évaluation
- Epreuve 1Document6 pagesEpreuve 1ChristianPas encore d'évaluation
- Série Dipole RCDocument6 pagesSérie Dipole RCSoukrani Abdeljabbar0% (1)
- TD PalettisationDocument12 pagesTD PalettisationZine eddine Hadj mokhnachrPas encore d'évaluation
- TD 05 - Comportement Temporel Des SLCI Proportionnel, Dérivateur, Intégrateur Et Du 1er OrdreDocument4 pagesTD 05 - Comportement Temporel Des SLCI Proportionnel, Dérivateur, Intégrateur Et Du 1er OrdreMohamed AbaakilPas encore d'évaluation
- Simulation Redresseur Sinus 4qDocument7 pagesSimulation Redresseur Sinus 4qHana BahPas encore d'évaluation
- 144 Tdautomatique Tsi SpeDocument4 pages144 Tdautomatique Tsi SpeYoussef SadikPas encore d'évaluation
- Exo Chap1 Chap2Document7 pagesExo Chap1 Chap2Adil MehdaryPas encore d'évaluation
- TP2 MCC PrepaDocument6 pagesTP2 MCC PrepaAlfredho ShactarPas encore d'évaluation
- Ds2004 2Document2 pagesDs2004 2Jean CorreaPas encore d'évaluation
- Aucun Document N'est AutoriséDocument3 pagesAucun Document N'est AutoriséJean CorreaPas encore d'évaluation
- Aucun Document N'est Autorisé Sauf L'abaque de Black Et Les Courbes Normalisées Utilisées en Cours Et TDDocument2 pagesAucun Document N'est Autorisé Sauf L'abaque de Black Et Les Courbes Normalisées Utilisées en Cours Et TDJean CorreaPas encore d'évaluation
- Ds2005 1Document2 pagesDs2005 1Jean CorreaPas encore d'évaluation
- Ds2003 1Document2 pagesDs2003 1Jean CorreaPas encore d'évaluation
- (Fluide1) TD 202 2021Document9 pages(Fluide1) TD 202 2021Jean CorreaPas encore d'évaluation
- Ds2002 2Document4 pagesDs2002 2Jean CorreaPas encore d'évaluation
- Facicule Construction M4caniqueDocument101 pagesFacicule Construction M4caniqueJean CorreaPas encore d'évaluation
- Rayons X Structure Cristaux PDFDocument163 pagesRayons X Structure Cristaux PDFrahma rahmaPas encore d'évaluation
- Ds2004 1Document2 pagesDs2004 1Jean CorreaPas encore d'évaluation
- Materials Physic - IPSL2-print - 2Document13 pagesMaterials Physic - IPSL2-print - 2Jean CorreaPas encore d'évaluation
- Materials Physic - IPSL2Document82 pagesMaterials Physic - IPSL2Jean CorreaPas encore d'évaluation
- ds5optionPSI CorrigeDocument14 pagesds5optionPSI CorrigeLamine GuéyePas encore d'évaluation
- Poly 13x14 CristallographieCOMPACDocument26 pagesPoly 13x14 CristallographieCOMPACJean CorreaPas encore d'évaluation
- Em Pile MentsDocument4 pagesEm Pile MentsaminaPas encore d'évaluation
- TD PhysMat CIP2 - 20 21Document1 pageTD PhysMat CIP2 - 20 21Jean CorreaPas encore d'évaluation
- Em Pile MentsDocument4 pagesEm Pile MentsaminaPas encore d'évaluation
- Hacheur CoursDocument15 pagesHacheur CoursJean Correa100% (1)
- Envolons Nous !Document1 pageEnvolons Nous !Jean CorreaPas encore d'évaluation
- ds5optionPSI CorrigeDocument14 pagesds5optionPSI CorrigeLamine GuéyePas encore d'évaluation
- Line AgrisolDocument16 pagesLine AgrisolWilliam JonesPas encore d'évaluation
- RalubepDocument2 pagesRalubepazodepPas encore d'évaluation
- Wattmetre Numerique 1.generalitesDocument6 pagesWattmetre Numerique 1.generalitesNidhal AmariPas encore d'évaluation
- CompeurDocument10 pagesCompeurAbdoulPas encore d'évaluation
- Lot Pièces Electronique V5 - CDocument5 pagesLot Pièces Electronique V5 - CtarekanePas encore d'évaluation
- Photoelectric Sensors XU - XUB9BPBWM12Document6 pagesPhotoelectric Sensors XU - XUB9BPBWM12doc32 IMPas encore d'évaluation
- Liste Des Prix Siame - Novembre 2018Document28 pagesListe Des Prix Siame - Novembre 2018Wajdi SahliPas encore d'évaluation
- Catálogo FERVE 2020 ComprimidoDocument48 pagesCatálogo FERVE 2020 ComprimidoreyesmaaPas encore d'évaluation
- Rigidité Diélectrique Et Mécanismes de ClaquageDocument7 pagesRigidité Diélectrique Et Mécanismes de Claquagenarimen lamis rezkiPas encore d'évaluation
- Travaux Pratiques - ADCAO PDFDocument7 pagesTravaux Pratiques - ADCAO PDFAlouani KacemPas encore d'évaluation
- Commande MLIDocument14 pagesCommande MLIOthman NchifaPas encore d'évaluation
- U E' + R.I: Moteur À Excitation Séparée Moteur À Aimant Permanent Symbole SymboleDocument4 pagesU E' + R.I: Moteur À Excitation Séparée Moteur À Aimant Permanent Symbole SymboleMortadha RabahPas encore d'évaluation
- TDN 1 N 2Document3 pagesTDN 1 N 2Abdou VerrattiPas encore d'évaluation
- TD1 2Document2 pagesTD1 2Nidal Laatab100% (1)
- PDF PDFDocument74 pagesPDF PDFMoussa YameogoPas encore d'évaluation
- IMFCS01Document39 pagesIMFCS01Dang JinlongPas encore d'évaluation
- Filtrage Analogique Lineaire ExercicesDocument4 pagesFiltrage Analogique Lineaire ExercicesFadwa GHANIPas encore d'évaluation
- Myshop Solaire - Guide de Montage BMV 700-702-712 Victron EnergyDocument20 pagesMyshop Solaire - Guide de Montage BMV 700-702-712 Victron EnergyOlivier35300Pas encore d'évaluation
- Extrait-cours-Chap IV, Elect2 L1 S2 RTDocument7 pagesExtrait-cours-Chap IV, Elect2 L1 S2 RTZain GaradiPas encore d'évaluation
- PFE-Final ER-05 Hani Benguesmia 2020Document68 pagesPFE-Final ER-05 Hani Benguesmia 2020Riadh AbdessemedPas encore d'évaluation
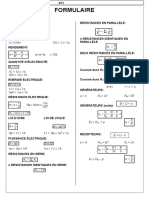
- Formulaire D ElectrotechniqueDocument4 pagesFormulaire D ElectrotechniqueralojakPas encore d'évaluation
- LE03550AEDocument64 pagesLE03550AEAbdoulaye MangaPas encore d'évaluation
- Génie Électrique Microcontrôleur 2012 2013 (Aiissa)Document11 pagesGénie Électrique Microcontrôleur 2012 2013 (Aiissa)بونتو bounto100% (1)
- Bon de Sortie Raccordée Abou Kacem Chebbi RectifiéDocument3 pagesBon de Sortie Raccordée Abou Kacem Chebbi RectifiéAchraf AEPPas encore d'évaluation
- Cours D'électronique Ch2 Diodes Et ApplicationsDocument44 pagesCours D'électronique Ch2 Diodes Et ApplicationsZouhayra LaajiliPas encore d'évaluation