Académique Documents
Professionnel Documents
Culture Documents
RINA 2009 Bulk Carriers - Allowable Hold Mass Curves - Bureau Veritas - FINAL
Transféré par
Konstantis_chDescription originale:
Titre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
RINA 2009 Bulk Carriers - Allowable Hold Mass Curves - Bureau Veritas - FINAL
Transféré par
Konstantis_chDroits d'auteur :
Formats disponibles
A PRACTICAL ASSESSMENT OF EXISTING BULK CARRIER LOCAL STRUCTURAL
STRENGTH IN RELATION TO THE ALLOWABLE HOLD MASS CURVES
K Chatzitolios, Bureau Veritas, Greece
G de Jong, Bureau Veritas, France
Dr JE Kokarakis, Bureau Veritas, Greece
SUMMARY
The allowable hold mass curves for vessels built after 1998 are mandatory in the loading manual & the loading
instrument as per IACS Unified Requirements S1A. The majority of the bulk carriers in service have been constructed
before 1998 and generally do not have allowable hold mass curves.
Pre-1998 bulk carriers engaged in multi-port operations need to have allowable hold mass curves to control the local
strength of the cargo hold structure for the envisaged loading conditions. The curves are produced according to the
loading conditions of the approved loading manual as a function of the draught. For the case of an individual hold they
are determined by examining bending and shear stresses in floors and girders, as well as buckling stresses in the
associated plating. For the case of two adjacent holds the strength of the transverse bulkhead and cross deck is
considered as well. The curves can be checked with finite element analysis or other methods to obtain the applicable
safety margin. The paper presents a theoretical derivation of the hold mass curves as function of the draught and
provides some comparisons with formulations by other class societies and IACS requirements. A practical methodology
to determine the hold mass curves when not available is proposed.
An interesting application, presented in a case study in the paper, is the determination of the maximum draught as a
function of the static still water bending moment at the empty holds. The combination of a hogging hull girder bending
moment and hydrostatic pressure at 60 to 70% of the scantling draught may cause severe buckling of the bottom plating
and exceed its ultimate strength. A methodology on how to assess this loading condition for holds which are not usually
empty is proposed.
1. INTRODUCTION
In 1998 IACS adopted Unified Requirement (UR) S1A,
effectively introducing additional requirements for
loading conditions, loading manuals and loading
instruments of both new and existing bulk carriers
1
.
UR S1A requires existing bulk carriers (that is, bulk
carriers contracted for construction before 1 July 1998)
with a length of 150 m and above to be provided with a
class approved loading instrument in order to enable the
ships master to check the envisaged loading conditions
(whether at sea or in port) against permissible
longitudinal strength criteria (hull girder bending
moments and shear forces). In this context a loading
instrument is considered as an effective means to
preventing overstressing of the hull girder, which could
potentially result in global structural collapse. In
addition, UR S1A requires single side skin bulk carriers
of 150 m length and above to be provided with a class
approved loading manual with typical loading sequences
where the vessel is loaded from commencement of cargo
loading to reaching the full deadweight capacity, and
1
UR S1A was introduced as an addition to UR S1, which
provides more general requirements for loading
conditions, loading manuals and loading instruments. UR
S1 is considered to be an implementation of the
requirements of Regulation 10(1) of the
International Convention on Load Lines,
1966.
vice versa. The reasoning behind this requirement is to
ensure that the vessel is not overstressed during loading
and discharging in port, which can happen due to faulty
loading sequences or (de)ballasting operations. The
sequence of loading the cargo holds, as well as the
amount of cargo which is loaded in each hold in one time
greatly influences the induced hull girder loads. This
issue is still very actual, in particular due to high speed
cargo loading at iron ore terminals (up to 16,000 tonnes
per hour) [1].
For new bulk carriers (contracted for construction on or
after 1 July 1998) of 150 m length and above, UR S1A
requires the class approved loading manual to
additionally include the following data:
Maximum allowable and minimum required mass of
cargo and double bottom contents of each hold as a
function of the draught at mid-hold position;
Maximum allowable and minimum required mass of
cargo and double bottom contents of any two
adjacent holds each hold as a function of mean
draught in way of these holds.
The values of maximum allowable and minimum
required mass of cargo can be plotted as a function of the
draught and are generally referred to as hold mass
curves. The loading instrument is required to display
whether the cargo hold mass is within permissible limits
and therefore needs to incorporate the hold mass curves.
This requirement for new ships effectively regulates
that, for any given loading condition, the local strength
capacity of the hull structure (strength of double bottom,
transverse bulkheads, etc.) is not exceeded and therefore
is to be considered as a complementary safety criterion to
the longitudinal strength criteria applicable to both new
and existing bulk carriers.
As pre 1998 bulk carriers are not required to have hold
mass curves, from an operational viewpoint they are
inherently less flexible than there newer counterparts, as
in practice they can only sail in the loading conditions
which have been approved in the loading manual. This
becomes a handicap if they are engaged in multi-port
operations, where the vessel will experience a wide
variety of loading conditions which may not be included
in the loading manual. Therefore, pre 1998 bulk carriers
effectively need hold mass curves in order to operate
safely on multi-port trades. As about 60% of the
approximately 7,000 bulk carriers in service today have
been built before 2000 (assuming a time delay of 18
months between contract signing and ship delivery), this
is by no means an academic issue [2].
For an individual hold the hold mass curves are
determined by examining shear stresses in floors and
double bottom girders, while for adjacent holds the
strength of cross deck and transverse bulkheads are of
main concern. The adjacent holds model is further
studied by evaluation of cross deck stresses stemming
from bending of the transverse bulkhead and hull girder
torsion. The curves can be checked with Finite Element
Analysis (FEA) or other methods to obtain the safety
margin.
This paper presents a comparison between various
formulations of hold mass curves amongst classification
societies and proposes ways to determine the curves for
existing ships when not available (pre 1998 bulk
carriers), as such creating a safe and easy way to expand
the trading flexibility of older bulk carriers.
In section 2 the technical background of the hold mass
curves is presented, considering formulations by different
class societies as well as IACS. Section 3 explains the
importance of hold mass curves for bulk carriers engaged
in multi-port operations; the focus is on the maximum
permissible draught in way of the empty holds as a
function of the hogging SWBM (Still Water Bending
Moment). Section 4 proposes a methodology for deriving
the hold mass curves on the basis of the theoretical
considerations presented in the previous sections and
presents an interesting application of hold mass curves:
the determination of the maximum draught as a function
of the static bending moment at the empty holds. The
combination of a hogging hull girder bending moment
and hydrostatic pressure at 60 to 70% of the scantling
draft is considered, which may cause severe buckling of
the bottom plating and exceed its ultimate strength
capacity. A methodology on how to assess this loading
condition for holds which are not usually empty is
proposed. Finally, in section 5 the main conclusions are
drawn and further recommendations are made.
TECHNICAL BACKGROUND
2.1 HOLD MASS CURVES FOR SEAGOING
CONDITIONS
As explained above, the hold mass curves are a means
for the master to decide obtain the maximum allowable
or minimum required cargo mass for an envisaged
loading condition which is not included in the loading
manual. The goal is to prevent overloading of the local
structure, such as the double bottom structure (plating,
floors and girders), the transverse bulkheads and the
cross deck structures. For example, if for an individual
cargo hold a cargo mass P has been approved for a
loading condition with a draught T1 at mid-length of the
considered hold, the double bottom structure might
experience excessive flexural deformation if the same
cargo mass is loaded for a loading condition with a
corresponding draught less than T1 (e.g. 0.5T1), as
depicted in Figure 1.
Figure 1: Excessive flexural deformation of double
bottom structure [3]
The basic idea behind the derivation of the hold mass
curves is to use the approved loading conditions from the
loading manual as a starting point for an inverse analysis
in order to obtain acceptable new conditions. As the net
resultant load on the double bottom is the governing
parameter for the variation in the local structural
response, the objective of the exercise is to control this
load, which is defined as the difference between the
downward force exerted by the mass of the cargo in the
hold & ballast water in the double bottom tanks and the
upward force resulting from the sea pressure. Both forces
are composed of a static and a dynamic component. The
downward force consists of the own weight of the mass
of the cargo and ballast water (static part) plus the inertia
loads caused by the ship motion induced accelerations
acting on this mass (dynamic part)
2
. The upward force
consists of the hydrostatic load (static part) plus the
hydrodynamic loads caused by ship motions in waves
(dynamic part). In linear rigid body dynamics the
hydrodynamic load is considered to be the sum of the
hydromechanical (reaction) loads caused by the ship
2
The own mass of the ship structure is neglected as it is
small compared to the mass of the cargo.
moving (oscillating) in the undisturbed fluid surface and
the forces exerted by the waves on the restrained body
(wave exciting loads). An example of the net resultant
load on the double bottom is presented in Figure 1, in
which only the static parts are considered.
For the purpose of structural analysis it is sufficiently
accurate to approximate the hydrodynamic load by a
Froude-Krylov type of wave load using the ship relative
motion as wave amplitude (as opposed to the wave
elevation relative to the undisturbed free surface) [4]. As
the variation of the net resultant load on the double
bottom is the highest for the upright ship condition
(usually the head sea condition is considered) the
analysis focuses on this condition, see Figure 2.
Figure 2: Wave load distribution on the basis of the
relative ship motion hU in upright ship condition [4]
In a generic form, the net resultant load on the double
bottom of a single cargo hold, in terms of the average
pressure
DB
p , can be expressed as follows:
,
`
.
|
+
+ +
L
T 2
U 1
H
ZU DB C
DB
1
e h T g
B
) a g )( M M (
p
(1)
where MC is the mass of the cargo, MDB the mass of the
ballast water in the double bottom tanks, g the gravity
acceleration, aZU the vertical acceleration at mid-length of
the cargo hold, H the length of the considered hold, B
the moulded breadth, the density of seawater, T1 the
draught at mid-length of the considered hold, hU the
relative motion at mid-length of the considered hold
corresponding to the vertical acceleration aZU and L the
ship length (as defined in the Rules)
3
. The factor
L
T 2
1
e
is a correction on the relative wave motion (or
elevation), taking into account the rapid decrease in
orbital motion and velocity of the fluid particles with
increasing distance from the free surface, effectively
reducing the hydrodynamic pressure on the bottom with
increasing draught and vice versa. The corrected wave
elevation is usually called the effective wave elevation
[5]. In hydrodynamic literature this effect is sometimes
referred to as the Smith Effect. It is to be noted that for
reasons of simplicity the presence of the hopper tanks
and lower stool of the (corrugated) transverse bulkheads
3
It is assumed that the ship is moving in deep water with
wavelength equal to the ship length.
is ignored; an issue which needs to be accounted for later
on in the analysis
4
.
The vertical acceleration aZU and relative motion hU need
to be evaluated simultaneously (at the same time instant)
to satisfy Newtons Second Law. This can be done on the
basis of ship motion calculations (2D or 3D radiation-
diffraction analysis) and or by applying reference values
of the load cases defined in the Rules (which have been
obtained from a statistical analysis of a large amount of
ship motion calculations) [6].
The goal is to obtain the maximum values of the net
resulting upward and downward loads, which can then be
compared to the net loads of the corresponding approved
loading conditions. By plotting the known approved
combinations of cargo mass and draught in a graph, the
hold mass curves are obtained, as schematically shown in
Figure 3. Curve (a) connects the approved loading
conditions 1 (maximum cargo mass P at scantling
draught T) and 2 (part load condition), denoting the
maximum permissible cargo mass. Curve (b) connects
the approved loading conditions 3 (loading condition at
the maximum permissible draught Tmax at which the
considered hold may be empty) and 4 (minimum
required cargo mass at scantling draught). The enclosed
(shaded) area is considered to be the safe loading area in
which the net resulting load on the double bottom is
within acceptable limits.
Figure 3: Example of hold mass curves
It is to be noted that the approach is rather conservative,
as curve (a) suggests that the maximum permissible
cargo mass which can be taken in the hold can only be
loaded when sailing at the scantling draught. Most
designs, however, have sufficient margin to sail with the
maximum cargo mass at a draught less than the scantling
draught. In that case curve (a) is replaced by the two
segmented curve (c), thus enlarging the loading
flexibility of the ship
5
. It is also to be noted that the hold
mass curves are not necessarily straight lines.
4
It is also assumed that the cargo upper surface is
horizontal, but this assumption is also made in the base
case (loading condition in the approved loading manual).
5
This is explicitly taken into account by UR S25 and the
CSR.
The hold mass curves can be computed by demanding
that the net resultant double bottom pressure in the
envisaged loading condition is to be equal to the net
resultant pressure in the approved reference loading
condition. Considering that the variation in vertical
acceleration and relative motion is small over the range
of operational draughts [7], the maximum permissible
cargo mass Pmax at draught T T
1
< , where there is no
ballast water in the double bottom tanks, can be written
as follows (curve (a) in Figure 3):
]
]
]
]
,
`
.
|
+
+
L
T 2
L
T 2
U 1
ZU
H
max
1
e e h ) T T (
a g
Bg
P P
(2)
where P is the maximum cargo mass at scantling draught
T (see above).
The worst load case for the downward net resulting
double bottom pressure, which is relevant for the
maximum permissible cargo mass, is the case where the
vertical downward acceleration aZU reaches the maximum
value. In BV Rules this is represented in load case b,
for which the relative wave motion is half of the
maximum value. The maximum value is attained in load
case a, which is essentially a Froude-Krylov case as the
vertical acceleration for this load case is zero (ship fixed
in the undisturbed wave) [6].
Expression (2) can be simplified by considering that, for
practical loading conditions, the absolute value of the
term
,
`
.
|
L
T 2
L
T 2
U
1
e e h
is much smaller than
) T T (
1
and also has a negative value which
increases Pmax. Therefore, if this term is neglected for
reasons of simplicity this is on the safe side. Applying
this simplification, expression (2) reduces to:
) T T (
a g
g
B P P
1
ZU
H max
+
(3)
which is still dependent on the vertical acceleration aZU.
Computation of the value of aZU utilising the formulae
from the Rules is straightforward and can today easily be
incorporated in the on-board loading computer. For older
ships with less modern on-board tools, however, this may
be more difficult. In order to achieve fast and practical
results, suitable for on-board calculation, the term
ZU
a g
g
+
may be set to unity (essentially neglecting
aZU). This is again a simplification on the safe side, as in
reality the term is always less than unity
6
. Applying this
second simplification, expression (2) further reduces to:
6
For a capesize bulk carrier the term typically varies
between 0.7 (midship region) and 0.85 (hold no 1),
where the accelerations are calculated for a probability
level of 10
-5
.
) T T ( B P P
1 H max
(4)
which is very easy to apply. On the basis of equation (4),
the slope of curve (a) in Figure 3, dPmax/dT, is constant
and equal to B
H
, which is in essence the hold
water-plane area multiplied by the water density.
Following the same reasoning as above, the minimum
required cargo mass Pmin at draught
max 1
T T > , where
the amount of ballast water in the double bottom tanks is
the same for both loading conditions (may be empty or
full), can be written as follows (curve (b) in Figure 3):
]
]
]
]
,
`
.
|
+
+
L
T 2
L
T 2
U max 1
ZU
H
min
max 1
e e h ) T T (
a g
Bg
P
(5)
The worst load case for the upward net resulting double
bottom pressure, which is relevant for the minimum
required cargo mass, is the case where the positive
relative motion hU reaches the maximum value. In BV
Rules this is represented in load case a, for which the
vertical acceleration is zero (see above). Application
reduces (5) to:
]
]
]
]
,
`
.
|
+
L
T 2
L
T 2
U max 1 H min
max 1
e e h ) T T ( B P
(6)
Expression (6) can be simplified by considering that, for
practical loading conditions, the absolute value of the
term
,
`
.
|
L
T 2
L
T 2
U
max 1
e e h
is much smaller than
) T T (
max 1
and also has a negative value which
decreases Pmin. Therefore, if this term is neglected for
reasons of simplicity, this is on the safe side. Applying
this simplification, expression (6) reduces to:
) T T ( B P
max 1 H min
(7)
which is independent of the relative motion hU and the
vertical acceleration aZU and therefore very easy to apply.
Similarly to the development above, the slope of curve
(b) is equal to the one of curve (a). Consequently curves
(a) and (b) are parallel.
Further analysis of expressions (4) and (7) learns that,
due to the simplifications, the imposed conservation of
load (net resulting double bottom pressure) has in fact
been reduced to imposed conservation of mass, which is
easier to compute. For the case of the maximum cargo
mass the reduced hold displacement due to the reduction
in draught equals the reduction in permissible cargo
mass, while for the case of the minimum cargo mass the
increased hold displacement due to the increase in
draught equals the increase in required cargo mass.
As mentioned above the presence of the hopper tanks and
transverse bulkhead lower stool have been ignored. The
consequences of these simplifications are depending on
the height of the rated upper surface of the bulk cargo
above the tank top hm, see Figure 4.
Figure 4: Effect of cargo filling level on double bottom
cargo pressure
For the maximum permissible cargo mass we consider
case a, denoted by hm,a, where the rated upper surface is
above the hopper tank and can be considered as the
maximum filling level corresponding to the maximum
cargo mass P at the scantling draught T. If a new loading
condition with less draught is envisaged, application of
(4) yields a reduction in cargo mass of
) T T ( B
1 H
. This is achieved by reducing hm by
) T T (
1
B
, where B is the bulk cargo density.
This expression is valid only if the new rated upper
surface cargo level is above the top of the hopper tank; in
other words:
DB HT m
h h h . If the rated upper
surface would be less (case b), the amount of cargo mass
reduction to keep constant the net resultant pressure on
the double bottom (flat part) would be less due to the
presence of the hopper tank and transverse bulkhead
lower stool volumes. This means that the results are
slightly conservative but on the safe side.
For the minimum required cargo mass the draught is
increased above the maximum Tmax draught for which the
cargo hold has may be empty in accordance with the
approved loading manual. So the hold is filled from zero
to a certain value to compensate for the increase in sea
pressure exerted on the double bottom. Application of (7)
yields an increase in cargo mass (from zero) of
) T T ( B
max 1 H
. However, due to the presence of
the hopper tanks and transverse bulkhead lower stool less
cargo mass is required to achieve the necessary cargo
pressure increase on the double bottom (flat part) than is
computed by expression (7), where the full displacement
addition (acting on the total width of the ships bottom)
is compensated as cargo mass increase (gradually
increasing its influence from the width of the flat part of
the double bottom to the total ship breadth). Therefore,
the minimum required cargo mass is overestimated by
expression (7) and can be corrected for the presence of
the non cargo carrying volumes. For a rated upper
surface cargo level above the top of the hopper tank (
DB HT m
h h h ), the correction includes the complete
volume of the hopper tanks, which gives:
[ ]
LS DB HT HT H B max 1 H min
V ) h h ( b ) T T ( B P
(8)
where, bHT is the width of the hopper tank, hHT the height
of the hopper tank and hDB the height of the double
bottom.
For a rated upper surface cargo level below the top of the
hopper tank (
DB HT m
h h h < ), the correction is
dependent on the value of hm, which is not known a priori
but can be estimated by
) T T ( h
max 1
B
m
. As the
hopper tanks are neglected, this is a conservative
approach (hm is overestimated). The minimum cargo
mass can than easily be calculated by considering the
cargo volume up to filling level hm and the associated
bulk cargo density. As the transverse bulkhead lower
stool is low compared to the height of the cargo hold, hm
will usually be higher than the height of the lower stool.
This justifies a correction on Pmin by subtracting the term
LS B
V . Defining bm as follows, see Figure 5:
) T T (
h h
b
b
max 1
DB HT
HT
B
m
(9)
we can write for the minimum required cargo mass:
]
]
]
+
LS DB HT
HT
m HT m
H B min
V ) h h (
b
b ) b 2 B b (
P
(10)
Figure 5: Definition of bm
The verification of the maximum permissible and
minimum required cargo mass is to be performed for the
case of individual cargo holds, as described above, and
for the case of two adjacent cargo holds. In fact, the case
of individual cargo holds addresses the maximum
bending moment and shear force in the floors, the
maximum bending moment in the double bottom girders
at mid-length of the cargo hold and the maximum shear
force in the double bottom girders at the ends of the
cargo hold when considering alternate loading conditions
(angular deformation at hold ends due to asymmetrical
loading produces the maximum bending moment in the
double bottom girders at mid-length of hold). The case of
two adjacent cargo holds considers the maximum
bending moment and shear force in the double bottom
girders acting simultaneously at the transverse bulkhead
(the condition of zero angular deformation at the hold
ends due to symmetric loading produces the maximum
bending moment in the double bottom girders at the hold
ends) and the shear strength of the (corrugated)
transverse bulkhead.
Based on the derivations and considerations above, it is
easy to see that a straightforward application of the
conservation of mass principle provides quick and
conservative estimates of the maximum permissible and
minimum required cargo mass. The maximum
permissible cargo mass for two adjacent holds
max 2 1
) P P ( + at a draught T T
1
< can be written as
follows:
) T T ( B ) ( P P ) P P (
1 2 H 1 H 2 1 max 2 1
+ + +
(11)
where
2 1
P P + is the maximum mass of cargo in two
adjacent holds at the scantling draught, while H1 and H2
denote the length of the two adjacent cargo holds,
respectively.
Following the same reasoning, the minimum required
cargo mass for two adjacent holds
min 2 1
) P P ( + at a
draught
max 1
T T > can be written as follows:
) T T ( B ) ( ) P P (
max 1 2 H 1 H min 2 1
+ +
(12)
2.2 HOLD MASS CURVES FOR HARBOUR
CONDITIONS
During loading and unloading in port the maximum
allowable cargo mass is higher than at sea due to the
absence of waves generating large vertical accelerations
and relative motions. In a similar fashion the minimum
required cargo mass is less than at sea. Due to this
reduction of dynamic loads, the ship has more flexibility
in loading conditions during port operations, which is
regulated by providing specific hold mass curves for the
harbour conditions in addition to the seagoing conditions.
In the ideal port situation of no accelerations and no
relative motions expression (1) reduces to:
1
H
DB C
DB
gT
B
g ) M M (
p
+
(13)
The maximum permissible cargo mass for a single hold
in harbour condition Pmax is derived on the basis of the
known maximum permissible cargo mass from seagoing
condition at the scantling draught. Equating expression
(1) for seagoing condition with P M
C
, 0 M
DB
and T T
1
to expression (14), after some algebra,
gives:
DB 1
L
T 2
U H
ZU
max
M T e h T B
g
a g
P P
,
`
.
|
+
(14)
This expression requires computation of aZU and hU.
Simply ignoring them would yield extremely
conservative results, as expression (15) would be
effectively reduced to expression (4) for seagoing
conditions, with the exception of the double bottom
ballast water mass which is very small compared to the
maximum cargo mass. In other words, the loading
flexibility of the ship would be too much restricted.
Therefore, any attempt for simplification of (15) must
still include one of the two dynamic parameters.
Rewriting (14) into a static and a dynamic part gives:
( )
DB 1 H static max,
M T T B P P
(15)
L
T 2
U H
ZU
dynamic max,
e Bh
g
a
P P
(16)
The key point for simplification is to evaluate the two
terms of (17) against each other. Making use of practical
data on typical bulk carriers and considering the worst
load case for the downward net resulting double bottom
load (maximum downward vertical acceleration), it can
be shown that approximately
L
T 2
U H
ZU
e Bh 3
g
a
P
. Therefore, (17) can be
approximated by:
L
T 2
U H dynamic max,
e Bh 2 P
(17)
It can further be shown that the L/T ratio for typical bulk
carriers from 10k DWT is between 12.5 and 19.
Therefore, the term
L
T 2
e
will be between 0.60 and
0.70. By setting
L
T 2
e
to a conservative value of 0.5
(the corresponding L/T ratio is 9), expression (18) can be
conservatively further reduced to:
U H dynamic max,
Bh P
(18)
This is conservative, as the value of the dynamic part,
giving a positive contribution to the maximum
permissible cargo mass, is underestimated. As such,
expression (14) can be safely simplified as follows:
( )
DB 1 U H max
M T h T B P P
(19)
where hU corresponds to the relative motion for the load
case where the vertical acceleration is maximum, which
is easy to calculate (BV Rules load case b).
The minimum required cargo mass for a single hold in
harbour condition Pmin is derived on the basis of the
known minimum required permissible cargo mass from
seagoing condition at the scantling draught. Equating
expression (1) for seagoing condition with 0 M
C
,
0 M
DB
and
max 1
T T to expression (14) results in
the following expression
DB max
L
T 2
U 1 H min
M T e h T B P
max
,
`
.
|
(20)
which is independent of the vertical acceleration aZU.
Following the reasoning above,
L
T 2
e
can be taken as
0.5. This underestimation is on the safe, side as it
increases the minimum required cargo mass. In doing so,
expression (21) can be reduced to:
DB max U 1 H min
M ) T h 5 . 0 T ( B P
(21)
where hU corresponds to the relative motion for the load
case where the relative motion is maximum, which is
easy to calculate (BV Rules load case a).
In a similar fashion as above, applying the conservation
of mass principle, expressions for the maximum
permissible and minimum required cargo mass for two
adjacent holds can be derived. The maximum permissible
cargo mass for two adjacent holds
max 2 1
) P P ( + at a
draught T T
1
< can be written as follows:
2 DB 1 DB 1 U 2 H 1 H
2 1 max 2 1
M M ) T h T ( B ) (
P P ) P P (
+
+ +
(22)
where
2 1
P P + is the maximum mass of cargo in two
adjacent holds at the scantling draught, H1 and H2
denote the length of the two adjacent cargo holds,
respectively, hU corresponds to the relative motion for the
load case where the vertical acceleration is maximum
(BV Rules load case b), while MDB1 and MDB1 represent
the mass of the double bottom ballast water of the two
adjacent cargo holds, respectively.
Applying the same reasoning, the minimum required
cargo mass for two adjacent holds
min 2 1
) P P ( + at a
draught
max 1
T T > can be written as follows:
2 DB 1 DB
max U 1 2 H 1 H min 2 1
M M
) T h T ( B ) ( ) P P (
+ +
(23)
where hU corresponds to the relative motion for the load
case where the relative motion is maximum (BV Rules
load case a).
2.3 CONSIDERATIONS FOR IMPROVEMENT
In order to make the process of evaluating hold mass
curves as practical and efficient as possible, the formulae
derived in this section have been simplified as far as
possible. This enables easy calculation on-board which
does not require complicated mathematics. In order to
stay on the safe side, the simplifications give a rather
conservative result, which inherently means that there is
room for optimisation of loading flexibility when the
more complex formulae are used instead of the
simplified ones. The obvious conservative assumption in
all formulations for the generation of the mass hold
curves is that it is assumed that the shear strength at full
draft is marginal and it is necessary to preserve shear
force at different drafts.
With the availability of good on-board computation
tools, in particular the loading instrument, this has
become relatively easy to implement. In fact,
improvements in the Rules after the introduction of UR
S1A are mandating the implementation of the hold mass
curves in the loading instrument, as will be described in
the following section.
2.4 DEVELOPMENTS OF IACS UNIFIED
REQUIREMENTS FOR HOLDS MASS
CURVES FOR NEW RULES AFTER UR S1A
As described in the introduction, UR S1A makes the
inclusion of the hold mass curves in the approved loading
instrument mandatory for new ships
7
. UR S20 has
introduced the development of the hold mass curves have
taking into account cargo hold flooding, UR S20 is
applicable to new single and double side skin bulk
carriers of 150 m length and over with cargo density
equal to or higher than 1.0 m
3
(applicable for single side
skin bulk carriers contracted for construction on or after
1 July 1998 and double side skin bulk carrier contracted
for construction on or after 1 July 1999 or 1 January
2000, depending on the width of the double side skin)
and considers the allowable hold loading in the case of
flooding of any (individual) cargo hold on the basis of
the cargo carried (volume, density and permeability),
effectively increasing bulk carrier safety. Due to the
change in the maximum permissible cargo mass at the
maximum draft, the hold mass curves for the maximum
permissible cargo mass for a reduced draught are
changed as well. In a similar fashion UR S22 has
changed the allowable hold loading of the foremost cargo
hold of bulk carriers bulk carriers contracted for
construction before 1 July 1998, with length of 150 m or
more and cargo density of equal to or higher than 1.78
t/m
3
.
With the introduction of UR S25 the hold mass curves
have been further developed. UR S25 is applicable to
bulk carriers of 150 m in length and over, which are
7
In the context of UR S1A new ships are ships
contracted for construction on or after 1 July 1998.
contracted for construction on or after 1 July 2003. With
UR S25, harmonised notations and associated design
loading conditions have been introduced. This has
created a uniform way to assess bulk carrier designs with
regard to their cargo carrying capacity and loading
flexibility. This in turn has generated a high degree of
transparency for ship owners and operators, as well as a
technical level playing field for designers and class
societies, and as such further enhanced bulk carrier
safety.
The three basic notations are as follows [8]:
BC-A: for bulk carriers designed to carry dry bulk
cargoes of cargo density 1.0 t/m
3
and above with
specific holds empty at maximum draught in
addition to BC-B conditions
BC-B: for bulk carriers designed to carry dry bulk
cargoes of cargo density 1.0 t/m
3
and above with
all cargo holds loaded in addition to BC-C
conditions
BC-C: for bulk carriers designed to carry dry bulk
cargoes of cargo density less than 1.0 t/m
3
For each of the three notations UR S25 provides a list of
design loading conditions to be checked. These loading
conditions are chosen in such a way that the design
incorporates multi-port operations which affect the local
strength and therefore directly define the hold mass
curves.
Key seagoing loading conditions in this respect are the
following [8]:
Any cargo hold is to be able to of carrying full cargo
mass with fuel oil tanks in double bottom in way of
the cargo hold, if any, being 100% full and ballast
water tanks in the double bottom in way of the cargo
hold being empty, at 67% of the maximum draught
8
;
Any cargo hold is to be capable of being empty with
all double bottom tanks in the way of the cargo hold
being empty, at 83% of the maximum draught;
Similar conditions apply for the case of two adjacent
cargo holds, with the empty cargo holds condition at
75% of the maximum draught. In addition, loading
conditions while in harbour are addressed.
In applying these seagoing conditions, the loading
conditions 5 and 3 presented in Figure 3 are fixed. In
fact, curve (a) is replaced by curve (c), as shown in
Figure 6. Only if the ship is assigned the additional
notation {no MP} these conditions can be waived.
Figure 6: Hold mass curves based on UR S25, including
multi-port operations
For BC-A bulk carriers, which are capable of sailing in
alternate conditions, specific additional loading
conditions are specified, including a margin in cargo
loading for the carriage of high density cargo (equal to
10% of full cargo mass).
UR S25 specifically addresses the issue of the hold mass
curves as based on the design loading conditions. For
other draughts than those specified in the design loading
conditions, the maximum allowable and minimum
required mass is to be adjusted for the change in
buoyancy acting on the bottom (to be calculated using
the water plan area at each draught). This is, in fact, an
implementation of the principle of the conservation of
mass as derived and justified in section 2.1.
8
The full cargo mass is defined as the cargo mass in a
hold corresponding to cargo with a virtual density
(homogeneous mass/hold cubic capacity, minimum 1.0
t/m3) filled to the top of the hatch coaming and is not to
be less than the actual cargo mass in a cargo hold
corresponding to a homogeneously loaded condition at
maximum draught [8].
2.5 OTHER CLASS SOCIETIES
Similarly to the developments described above, other
class societies apply the same basic concept in order to
estimate the mass hold curves. Examples of other pre-
CSR methods utilised by other classes are depicted on
Figure 7 for the seagoing case only.
The upper curve in essence preserves the net load, i.e.
the difference between the cargo weight and the
buoyancy of the cargo hold on the basis of purely static
considerations. The maximum cargo is deduced adding
the net load to the buoyancy force. Of course the
maximum cargo has been determined beforehand for
each hold by structural analysis. The minimum cargo at
design draft is determined by subtracting the net load
from the buoyancy. The abscissa for the minimum cargo
curve is determined from similar triangles, being parallel
to the maximum cargo curve.
Figure 7: Hold mass hold curves, pre-CSR, seagoing
The lower curve is based on the same philosophy, but it
accounts for dynamic effects as shown in the derivation
above. Parameter k ranges from 0.67 to 1 depending on
the load cases studied at the design stage. It is known that
IACS UR S25 dictates that the case of 67% of full draft
with the maximum cargo hold load be studied in the
design stage, with respect to local and global strength.
The minimum cargo curve, although not shown in the
lower part of Figure 6, is determined by the following
relationship:
,
`
.
|
4
T
T
5 P 11 . 0 P
max
max min
(24)
Equation (24) provides the interesting relation between
the minimum and the maximum cargo in the hold. This
relation is based on statistical evaluation of many bulk
carriers instead of computations. According to (24), the
minimum cargo load is 11% of the maximum one.
2.6 DEVELOPMENT OF HOLDS MASS
CURVES FOR THE COMMON
STRUCTURAL RULES
Hold mass curves generation is necessary for all bulk
carriers above 90 meters according to the CSR. The
approach follows the logic introduced in UR S25, see
section 2.4. According to the formulation, the maximum
cargo mass for a draught less than 67% of the maximum
is given by:
( )
h
T T 67 . 0
V 025 . 1 M 1 . 0 M ) T ( P
max
H H HD max
+
(25)
where h is the vertical distance from the top of the inner
bottom to the main deck at centre-line, VH is the volume
of the hold excluding the volume enclosed by the hatch
coaming, MH is the actual cargo mass corresponding to a
homogeneously loaded condition at maximum draught,
MHD is the maximum cargo mass allowed to be carried in
a cargo hold according to the design loading conditions
with specified holds empty at maximum draught, Tmax is
the maximum draught and T is the actual draught under
consideration.
Similarly for the minimum load:
( )
h
T 83 . 0 T
V 025 . 1 ) T ( P
max
H min
(26)
Equation (26) is valid for a draught above 83% of the
maximum as dictated by UR S25. The two relations
above which are depicted pictorially on Figure 8, are
valid for holds designed to be always full, like the ore
holds. For holds which can be empty at maximum draft,
there is no meaning for minimum cargo, whereas the
maximum cargo for draught less than 67% of the
maximum is given by:
( )
h
T T 67 . 0
V 025 . 1 M ) T ( P
max
H Full max
(27)
where MFull is the cargo mass corresponding to cargo
with virtual density filled up to the top of hatch coaming.
The density is the maximum between one and MH/VH.
Figure 8: Mass hold curves according to CSR (ore hold)
The curves are simplified greatly at the expense of
operational flexibility when the limitation {No MP} is
added to the vessel notation (see also section 2.4), as this
notation removes the need to evaluate additional loading
conditions dictated by UR S25, such as the carriage of
the maximum cargo at 67% of the maximum draught and
empty ore hold at a draught as high as 83% of the
maximum.
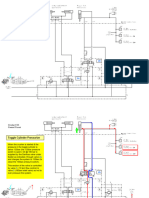
INFLUENCE OF STILL WATER BENDING
MOMENT
Bulk carriers are sometimes engaged in multi-port
loading operations, although the great majority are not
designed for such. It is possible in such a multi-port
operation that the designated ore holds may be unloaded
at one port with the vessel proceeding to another port for
further unloading. In such a case, the combination of
hogging hull girder bending moment and external
pressure corresponding to a reduced draught of the order
of 60 to 70% of the maximum one may result in buckling
of the bottom plating. Importantly, this is a case which is
not routinely checked. A simple procedure is derived
below which aims to calculate the maximum permissible
draught in way of the empty ore hold (designed to carry
heavy cargo but operating empty) as a function of the
hogging SWBM (Still Water Bending Moment). This
procedure does not require performing a finite element
analysis. Typically the calculations are performed for the
midship ore hold and are applicable to all ore holds when
operating empty. In case the draught is severely limiting,
local reinforcement of the bottom may be necessary to
resolve the buckling problem. It is thus proposed to
develop a graph of the maximum permissible graph as a
function of the SWBM on the basis of satisfying the
buckling strength criterion:
0 . 1 BF
9 . 1
y , crit
y R m
9 . 1
x , crit
x R m
]
]
]
]
+
]
]
]
]
(28)
Where
R m
, are the material and the load factors,
both equal to 1.02, BF is the buckling factor defined by
equation (28), crit,x and crit,y are the critical buckling
stresses for the panel under consideration, while x and
y are the stresses exerted on the bottom panels in the
longitudinal and transverse directions, respectively.
Transverse stress y results from the hydrostatic and
hydrodynamic pressures on the bottom, computed from
analysis of the elementary bottom panel. This stress is
determined from a grillage analysis through the BV
program STEEL described in the next section. It can also
be estimated by simple panel response relations with the
handicap that the fixity of the plate boundaries needs to
be assumed as either fixed or clamped. Longitudinal
stress y stems from the contribution of hull girder static
and dynamic bending moments and the bottom pressure.
The former can be determined by :
wave static girder hull , x
05 . 1 +
(29)
where the factor 1.05 is a safety margin type factor due
to the higher uncertainty of the wave induced stress. The
wave induced and the static stress are computed on the
basis of simple beam theory. The wave induced stress is
multiplied by a factor equal to 0.625 which represents the
maximum in 10
5
wave encounters. Satisfaction of
equation (28) above needs to be ensured at all
combinations of draught and SWBM (which can be
controlled). An application of the procedure described
will be presented in the examples section.
A limitation for the SWBM for a given draught should be
obtained as well from the buckling requirements of the
upper sloping bulkhead and side shell in the upper wing
tank (due to sagging bending moment). This limitation
could be critical for the bulk carriers with transversely
framed side shell in upper tank and thin sloping
bulkheads. The shear strength of the side shell between
the loaded and empty holds (in block loading) should
also be checked for the allowable cargo mass. The
sagging SWBM at any seagoing condition is not to
exceed:
WIBM
y
I
SWBM
crit sag max
(30)
where I is the hull girder net moment of inertia at the
mid-hold section, y is the distance between the hull
girder neutral axis and the structural member under
consideration (plate panel or longitudinal stiffeners), crit
is the critical buckling stress of the structural member
under consideration and WIBM is the Wave Induced
Bending Moment as prescribed in the Rules.
2. CASE STUDIES
4.1 DERIVATION OF HOLD MASS CURVES
As has been described previously, the hold mass curves
may provide the pre-1998 bulk carriers with the ability to
safely operate a variety of loading conditions apart from
the ones checked in the design stage. It is very common,
from an operational point of view, for a vessel to be
needed to load cargoes at reduced draughts and in
loading patterns different from the ones shown in the
loading manual. These loading conditions, apart from the
stability and longitudinal strength aspect which are
examined on-board with the aid of the loading
instrument, have also to be checked from local strength
point of view in the plan approval office. The aim of this
examination is to verify the structural integrity of the
plating, the ordinary stiffeners and the primary
supporting members for each hold under the given
loading condition. The plating and the stiffeners are
checked at various sections of the ships length with the
MARS program (a typical section in MARS is shown
in Figure 9). MARS is a panel-to-panel 2D analysis tool
based on the requirements of the BV Rules. The primary
supporting members (girders and floors) are assessed
using the STEEL program. STEEL is a 3D beam
analysis program which calculates all deformations, local
moments, forces and stresses in structures modelled by
beams subjected to static loads (in Figure 10 a STEEL
model is shown extending from the middle of one hold to
the middle of the next hold is depicted). Depending on
the loading condition at hand, the review may also
include the examination of the transverse bulkheads and
the cross deck areas. All this process is time consuming
and is also specific for each loading condition, which
means that it has to be repeated every time the proposed
condition deviates from the loading manual.
In order to bypass the process described above, the hold
mass curves can be formulated based on the vessels
existing loading manual. By the time these curves have
been created and implemented on board (as a supplement
to the loading manual), the vessel gains the flexibility to
be loaded in ways, otherwise restrictive, without further
examination.
Figure 9: Typical MARS section for the assessment of
the plating and ordinary stiffeners
Figure 10: Two-hold model in STEEL for the assessment
of the primary supporting members of the bottom
Application of the mathematical equations presented in
section 2 on a capesize bulk carrier yields the hold mass
curves for each hold and for the pairs of adjacent holds.
These are depicted in Figures 11 and 12 for No 5 and No
6 cargo holds, respectively, and in Figure 13 for the
adjacent No 5 and No 6 cargo holds. The main
particulars of the vessel are given in Table 1.
Table 1: Main particulars of the case study vessel
Length over all (Loa) 253.92 m
Length between perpendiculars 241.00 m
Moulded breadth 40.00 m
Moulded depth 21.00 m
Scantling draught 14.60 m
Block coefficient 0.822
Deadweight (approx.) 100,000 t
Figure 11: Hold mass curves for No 5 cargo hold
Figure 12: Hold mass curves for No 6 cargo hold
The loading manual can provide directly points 3 and 5
(see Figure 11), that produce the Pmax curve (a) and the
Pmin curve (b) for seagoing conditions. More specifically,
point 5 corresponds to a loading condition at which the
hold is fully loaded at the minimum possible draught
Tactual calculated at mid length of the hold. The critical
condition for the even holds that fulfils this requirement
is usually the full load homogeneous condition (in
particular the arrival condition, which has a smaller
draught than the departure condition) or the full load
alternate (arrival) condition for the ore holds. Since Tactual
(as depicted by the actual full load condition) is usually
smaller than the scantling draught T, the Pmax curve
obtains the flat section between points 5 and 1 by
applying T T
actual
in expression (4). It is important
to note at this point that when calculating the minimum
and maximum mass for each hold from the actual
loading conditions, the mass of double bottom contents
MDB (if any) should be added to the mass of cargo in the
hold, as this weight also counteracts to the upward acting
sea pressure. This MDB should not be confused as being
only ballast water, since it represents any liquid weight in
the double bottom situated underneath the flat inner
bottom of the cargo hold. It is common to have fuel and
diesel oil tanks underneath the aft holds of bulk carriers
and this weight is bound to be present in the full load
condition, while ballast water is not.
By following the same approach as above, point 3
corresponds to a loading condition at which the hold may
be empty, at the maximum possible draught Tmax
(calculated at mid-length of the hold). For an (uneven)
ore hold this is typically the heavy ballast condition (and
especially the departure condition, which has a greater
draught than the arrival condition), whereas for an even
hold this is, in most cases, the alternate condition at full
draught (departure condition). Due to these different
draughts, the Pmin curve of the even holds (curve (b) of
Figure 12) is usually a flat line which coincides with the
axis of the draughts (horizontal axis). The relevant curve
for the ore hold (curve (b) of Figure 11) starts at Tmax and
ends at T, being at the same time parallel to the Pmax
curve.
Following the procedure described above for No 5 cargo
hold, with a length of 26.6 m, points 5 and 3 would be
the following for the vessel under consideration (draught
in m, cargo mass in t):
) 26949 , 15 . 14 ( ) P , T ( P
max actual 5
(associated bulk cargo density: 1.67 t/m
3
)
) 0 , 07 . 10 ( ) 0 , T ( P
max 3
The Pmin and Pmax curves for seagoing conditions can now
be derived from expressions (4) and (7), respectively. In
order to produce the relevant curves for harbour
conditions, we need to calculate the relative motion hU..
According to BV Rules, the reference value of the
relative motion, at any hull transverse section, can be
obtained from the formulas in Table 2 [9].
Table 2: Maximum relative motion h1 in the upright ship
condition [9]
T1 shown in Table 2 (for a location between 0,3L and
0,7L) may be taken equal to Tactual (for the Pmax curve) and
Tmax (for the Pmin curve). The wave parameter is
calculated on the basis of the wave parameter C (see
Table 3) and the navigation coefficient n (see Table 4).
Based on the above, for No 5 cargo hold (mid-length
situated at x = 0.43L), the relative motion hU is equal to
m
h
h
U
291 . 3
2
1
for the Pmax curve (load case b)
and hU = h1 = 6.582m for the Pmin curve (load case a).
The relevant curves for harbour conditions (curves (c)
and (d)) can now be produced by substituting the data of
points 3 and 5 and hU to expressions (19) and (21). In
case that Pmax (seagoing) is calculated from a loading
condition with a liquid weight MDB underneath the hold,
then this weight has to be deducted in (19) and (21).
Table 3: Wave parameter C [9]
Table 4: Navigation coefficient n [9]
Figure 13: Hold mass curves for No 5 and No 6 adjacent
cargo holds
The same procedure should be followed for producing
the hold mass curves for two adjacent holds. The loading
conditions in the loading manual will provide points 3
and 5 of Figure 13. Point 5 represents the loading
condition at which the sum of the cargo mass in the two
adjacent holds and the related double bottom contents
) M M (
2 DB 1 DB
+ (if any) is maximum, at the
minimum possible draught Tactual (calculated at mid-
length of the holds). This could be a full load
homogeneous condition at the maximum draught (arrival
condition). Again by applying T T
actual
in (11), the
max 2 1
) P P ( + curve (a) shows the flat section between
points 5 and 1.
In a similar manner, point 3 now corresponds to a
loading condition at which the sum of cargo in two
adjacent holds and their relative double bottom contents
) M M (
2 DB 1 DB
+ (if any) is minimum, at the
maximum possible draught Tmax (calculated at mid-length
of the holds). An expected loading condition for this
point would be the heavy ballast condition in which the
adjacent holds are empty. This condition will not apply
to the heavy ballast hold and its adjacent holds because
of the weight of ballast water in the cargo hold. For this
pair of holds, the light ballast condition could be a
possible determinant for point 3. For the vessel under
consideration, points 5 and 3 are the following (draught
in m, cargo mass in t):
) 29407 , 46 . 14 ( ) ) P P ( , T ( P
max 2 1 actual 5
+
) 0 , 09 . 10 ( ) 0 , T ( P
max 3
The
min 2 1
) P P ( + and
max 2 1
) P P ( + curves for
seagoing conditions can now be derived by substituting
the data of points 3 and 5 to the expressions (11) and
(12), respectively (with length of No 6 cargo hold 26.6
m). Similarly expressions (22) and (23) will yield the
relevant
max 2 1
) P P ( + and
max 2 1
) P P ( + curves for
the harbour conditions. In case that
max 2 1
) P P ( +
(seagoing) is calculated from a loading condition with a
liquid weight ) M M (
2 DB 1 DB
+
underneath the
hold(s), then this weight has to be deducted in
expressions (22) and (23).
In the description given above for the creation of the hold
mass curves from the actual conditions of the loading
manual, points 5 and 3 have been correlated to typical
conditions found in all loading manuals. While this is
true most of the times, it is not always the case.
Sometimes these points correspond to different loading
conditions which involve combination of slack holds and
ballasted double bottom tanks. This is due to the fact that
bulk carriers built prior to the UR S25 requirements
would include in their loading manuals each condition
pattern (i.e. slack holds) that the vessel was designed for
to sail. The UR S25 solved this issue by applying generic
loading conditions during the design stage depending on
the type of the vessel.
4.2 MAXIMUM DRAFT AS A FUNCTION OF
STATIC BENDING MOMENT (ORE HOLDS)
The capesize bulk carrier utilised in the previous section
to demonstrate the derivation of the hold mass curves
will also be used to apply the method described in
Section 3 to study the influence of draught and static
bending moment on the bottom strength of the ore holds
(loaded in the alternate condition). The vessel does not
have BC-A, BC-B or BC-C notation in compliance with
URS 25. If it did, then it is known that (excluding the
case where {No MP} is assigned) the maximum draft
which can be tolerated for the ore holds with 100%
hogging SWBM is 83% of the scantling draught. The
question for the vessel under study, which is a pre-
URS25 ship, is to determine the maximum draught for
which the ore holds can be left empty. We choose to
study No 5 cargo hold, which is located in the middle of
the vessel and therefore subjected to the highest hull
girder stresses. Conclusions drawn for this hold can be
conservatively extended to the other ore holds as well.
The hogging SWBM is 2,538,000 KN
.
m and the wave
induced (vertical) bending moment WIBM equal to
3,650,000 KN
.
m. The moment of inertia of the cross
section in No 5 cargo hold and the position of neutral
axis are 330 m
4
and 9.5 m, respectively. On the basis of
these data, the buckling factors (defined by equation
(28)) are computed as a function of the draught
(percentage of scantling draught Ts) and the hogging
SWBM. The results are depicted in Figure 14.
Figure 14: Buckling factor versus draft and static
bending moment
It is evident that No 5 cargo hold cannot be empty close
and below the scantling draught. Calculations for the
maximum draught, assuming 100% of the SWBM is
acting, are depicted in Figure 15 as a function of the
buckling factor. It is found that the buckling factor BF is
lower than one below (approximately) 78% of the
scantling draught.
Figure 15: Buckling factor versus draught (at 100%
SWBM)
The sensitivity of the bottom plating buckling strength to
the static bending moment is depicted in Figure 16,
which is a multi-modal version of the previous one.
Figure 16 depicts the maximum permissible draught as a
function of the hogging SWBM. The sensitivity of the
buckling strength to the bottom thickness is shown in
Figure 17. As expected, there is a parabolic relation
between the buckling strength (BF) and the bottom
thickness.
Figure 16: Sensitivity to the hogging SWBM
Figure 17: Sensitivity to the bottom thickness
CONCLUSIONS
In order for bulk carriers to safely sail a certain loading
condition, three key points need to be checked. First, the
longitudinal strength characteristics, in terms of still
water bending moment and shear force, need to be
verified against the permissible values. Second, the
ships intact and damage stability particulars need to be
checked in accordance with the applicable criteria. Third,
the local strength of the cargo hold structure, loaded by
the cargo mass forces and external sea pressures, is to be
checked against applicable yielding, buckling and fatigue
criteria.
The first two points can be readily dealt with on-board by
entering the loading condition into the loading instrument
(or loading computer), which is mandatory for all bulk
carriers of 150 m in length and over. The loading
instrument of modern bulk carriers, contracted for
construction on of after 1 July 1998, IACS UR S1A
requires the hold mass curves, making verification of the
third point straightforward for the master. For pre-UR
S1A bulk carriers the hold mass curves are not
mandatory. Therefore, if loading conditions other than
the conditions of the approved loading manual are
envisaged, the hold mass curves need to be specifically
derived to check the local strength of the cargo hold
structure. This is particularly important when the vessel
will be engaged in multi-port operations with strong
variation of cargo mass against draught for the different
cargo holds. As the majority of the in-service of bulk
carriers consists of pre-UR S1A ships, a practical method
for establishing the hold mass curves is needed.
On the theoretical level (section 2), the basic requirement
for the derivation of the hold mass curves is the
conservation of the net vertical load on the double
bottom structure. These curves have been derived in this
paper and it was shown that, by conservatively
simplifying the derived expressions, the conservation of
load requirement reduces to the conservation of mass
requirement generally adopted in UR S25. With this
method simple expressions are obtained for calculating
the hold mass curves for individual cargo holds and two
adjacent cargo holds, in seagoing as well as harbour
conditions.
With the introduction of UR S25, later followed by the
CSR, the minimum envelope of the hold mass curves has
been clearly defined and the hold mass curves follow
directly from the application of the rule strength
requirements to the prescribed loading conditions. For
pre-UR S25 bulk carriers the situation is more
complicated. Generally speaking, the set of approved
loading conditions from the loading manual serves to
define the hold mass curves on the basis of the
expressions derived in this paper, which provides the
ship owner with more loading flexibility. In case the
envisaged loading condition is outside the hold mass
curves obtained in this manner, additional strength
checks are to be performed in order to accept the new
loading condition. It is obvious that the loading
flexibility obtained from the hold mass curves is
somewhat limited due to the conservative simplifications
which have been made in order to ensure an easy and
quick process. When the more general expressions
(before application of the simplifications) are applied,
more loading flexibility can be obtained in result.
In section 3 the importance of the combination of draught
and hogging still water bending moment for the case of
empty holds in multi-port conditions was emphasised, as
there is a significant risk of buckling of the bottom
plating due to the combination of local and global
compression stresses. This issue needs to be specifically
addressed when deriving the hold mass curves for multi-
port operations.
A practical application of the derived hold mass curves is
presented in the case studies on a 100k DWT capesize
bulk carrier. Hold mass curves have been derived for No
5 cargo hold, No 6 cargo hold and the adjacent No 5 and
No 6 cargo holds. In addition, the maximum draught at
which No 5 cargo hold can be empty, while the
maximum hogging still water bending moment is acting,
has been derived from a buckling analysis of the bottom
plating. Finally, a sensitivity study into the effect of the
value of the still water bending moment and bottom
plating thickness was carried out.
In conclusion, a practical methodology for the derivation
of the hold mass curves has been presented, which is
easy to apply to existing bulk carrier and can be used to
extend the operating profile of bulk carriers in a safe
way, taking into account the relevant strength limits of
the cargo hold local structure. This is particularly
relevant for existing ships which need to engage in multi-
port operations.
REFERENCES
1. Intercargo, Intercargo Briefing: Loading Rates,
Rev.0.1, 21 November 2008
2. Lloyds MIU, SeaWay, May 2009
3. IACS, Bulk Carriers - Guidance and Information on
Bulk Cargo Loading and Discharging to Reduce the
Likelihood of Over-stressing the Hull Structure,
Rec. 46, 1997
4. Bureau Veritas, Rules for the Classification of Steel
Ships, Pt B, Ch 5, Sec 5, [2], April 2009
5. Journe JMJ, Massie WW, Offshore
Hydrodynamics, First Edition, Delft University of
Technology, January 2001
6. Bureau Veritas, Rules for the Classification of Steel
Ships, Pt B, Ch 5, Sec 4, April 2009
7. Bureau Veritas, Rules for the Classification of Steel
Ships, Pt B, Ch 5, Sec 3, [2], April 2009
8. IACS, Harmonised Notations and Corresponding
Design Loading Conditions for Bulk Carriers, UR
S25, Rev. 2, July 2004
9. Bureau Veritas, Rules for the Classification of Steel
Ships, Pt B, Ch 5, April 2009
AUTHORS BIOGRAPHIES
Kostantinos Chatzitolios currently works in Bureau
Veritas as a hull surveyor in the plan approval office
(HPO) of Piraeus, Greece. He joined Bureau Veritas in
2005 after obtaining a Diploma in Naval Architecture
and Marine Engineering from the National Technical
University of Athens. In the four years that he has
worked in HPO he has dealt with stability and hull
matters of bulk carriers, oil tankers and passenger ships.
In the last two years he is specialized in the hull structure
of bulk carriers (existing and CSR) and oil tankers.
Konstantinos is currently undertaking a Masters degree
in Business Administration (International MBA) in the
Athens University of Economics and Business.
Gijsbert de Jong holds the current position of product
manager at Bureau Veritas and is based in the Head
Office in Paris. He is responsible for the international
business development in the field of container ships and
dry bulk carriers, as well as a number of specialised ship
types.
Gijsbert joined Bureau Veritas in 2001 after obtaining an
MSc in Naval Architecture & Marine Engineering from
Delft University of Technology. Before moving to Sales
& Marketing Management in 2007, he has worked as
hull surveyor and department manager for the Bureau
Veritas plan approval office in Rotterdam. During this
period Gijsbert has built up extensive experience with
dry cargo & container ships, dredgers, asphalt carriers,
product tankers, reefers & tugs. In his present position he
is working closely together with BVs technical
specialists and extensive international network to
develop new products and services meeting with the
maritime industrys specific needs.
Gijsbert has published technical papers on container
ships, bulk carriers, arctic shipping and fuel cell power
systems and regularly writes articles for marine industry
magazines.
Dr John Emmanuel Kokarakis, a 1979 graduate of
National Technical University of Athens, he holds PhD
(1986) and Masters degrees in Naval Architecture (1983)
and Masters in Mechanical Engineering (1984) from the
University of Michigan. He worked for over ten years as
a consultant undertaking technical problems worldwide.
His specialization was in the area of technical
investigation of marine accidents. In his capacity as a
forensic engineer he participated in the technical
investigation of the Exxon Valdez grounding, Sea-crest
Capsize, Piper Alpha fire and explosion, Aleutian
Enterprise foundering in Alaska as well as many other
accidents of less notoriety.
The last eleven years he works in Greece, in the area of
classification. Having served in the plan approval office
of American Bureau of Shipping in Piraeus, he then
joined Germanischer Lloyd heading their tanker and bulk
carrier team in Greece. He is currently the Technical
Director of Bureau Veritas in the Hellenic and Black Sea
Region. In his duties Dr. Kokarakis is responsible for the
smooth technical operation in the region as well as in the
harmonic cooperation with the BV offices worldwide to
the benefit of the BV clients in Greece. He was a
member of the team which developed the Common
Structural Rules.
Vous aimerez peut-être aussi
- Mukhopadhyay Question-Answer: 1. Latest Regulations For Bulk CarrierDocument88 pagesMukhopadhyay Question-Answer: 1. Latest Regulations For Bulk CarrierMariyath Muraleedharan KiranPas encore d'évaluation
- Longitudinal Strength SectionDocument19 pagesLongitudinal Strength SectionmaaathanPas encore d'évaluation
- Stability Precious NoteDocument48 pagesStability Precious NoteAung Htet KyawPas encore d'évaluation
- Barge 180Ft Deck Load Capacity & Strength-Rev1Document52 pagesBarge 180Ft Deck Load Capacity & Strength-Rev1Wahyu Codyr86% (7)
- Lifting Analysis Preview)Document4 pagesLifting Analysis Preview)Faisal AjaPas encore d'évaluation
- Assessing Stability of a Barge Crane for Cargo LiftingDocument44 pagesAssessing Stability of a Barge Crane for Cargo Liftingsethhoffman85Pas encore d'évaluation
- Stability Theory IIDocument36 pagesStability Theory IIFazl GhoriPas encore d'évaluation
- Fender Selection For STS Ops YokohamaDocument0 pageFender Selection For STS Ops YokohamabranikPas encore d'évaluation
- Stability Talkie TalkieDocument46 pagesStability Talkie TalkieSakthi Javelin100% (1)
- Container Lashing WebDocument16 pagesContainer Lashing WebSined SinedPas encore d'évaluation
- Critical KG Curves for Stability AssessmentDocument3 pagesCritical KG Curves for Stability AssessmentNAUTASPas encore d'évaluation
- Stability Talkie Talkie LJMUDocument46 pagesStability Talkie Talkie LJMURahul SainiPas encore d'évaluation
- Stability Talkie TalkieDocument43 pagesStability Talkie TalkieAhtashamuddin NizamudinPas encore d'évaluation
- Marpol 25A: Is It Safety or Absurdity?: Escuela Técnica Superior de Ingenieros NavalesDocument16 pagesMarpol 25A: Is It Safety or Absurdity?: Escuela Técnica Superior de Ingenieros NavalesJorge SilvaPas encore d'évaluation
- Executive Summary:: International Maritime OrganizationDocument11 pagesExecutive Summary:: International Maritime OrganizationelmauioPas encore d'évaluation
- Types and Power of Harbour Tugs - The Latest Trends: Prace Naukowe Politechniki WarszawskiejDocument12 pagesTypes and Power of Harbour Tugs - The Latest Trends: Prace Naukowe Politechniki WarszawskiejYudi DarmawanPas encore d'évaluation
- Stability Information Manual - FormatoDocument42 pagesStability Information Manual - FormatoelavayenPas encore d'évaluation
- Rabu Control Trim, Stability and StressDocument9 pagesRabu Control Trim, Stability and StressFaisal MakarimPas encore d'évaluation
- PIANC-World Congress Panama City, Panama 2018 Bollard LoadsDocument12 pagesPIANC-World Congress Panama City, Panama 2018 Bollard LoadsAnonymous ZMLlQvBop75% (4)
- 202 The Principles of Naval Architecture Series: 6.2.1 Classification Societies RulesDocument33 pages202 The Principles of Naval Architecture Series: 6.2.1 Classification Societies RulesJuan SilvaPas encore d'évaluation
- S1A.PDF - DefaultDocument2 pagesS1A.PDF - DefaultJony DarkoPas encore d'évaluation
- Motion Criteria For The Efficient Unloading of Container Vessels Hans MoesDocument14 pagesMotion Criteria For The Efficient Unloading of Container Vessels Hans MoesNaval2014DNPas encore d'évaluation
- Container Terminal Operation - Current Trends and Future ChallengesDocument32 pagesContainer Terminal Operation - Current Trends and Future ChallengesAkram Faisal100% (2)
- Safe Working LoadDocument16 pagesSafe Working LoadHugo Vco RvaPas encore d'évaluation
- OTC 15313 Development of Load-Out Methodology For On-Ground-Build FSODocument5 pagesOTC 15313 Development of Load-Out Methodology For On-Ground-Build FSOhiyeonPas encore d'évaluation
- Recent Developments in Loading ComputersDocument3 pagesRecent Developments in Loading ComputersanandreevPas encore d'évaluation
- (25452843 - New Trends in Production Engineering) Impact of Dock Tanks Pumping Plan On Structural Loads of A Dock and A ShipDocument7 pages(25452843 - New Trends in Production Engineering) Impact of Dock Tanks Pumping Plan On Structural Loads of A Dock and A ShipСергей ДедовPas encore d'évaluation
- BMTDSL Landing Craft Conpaper MAST Nov08 PDFDocument11 pagesBMTDSL Landing Craft Conpaper MAST Nov08 PDFJOSE PRASOBH..J100% (1)
- OFFSHORE LOADS TITLEDocument8 pagesOFFSHORE LOADS TITLEnormaszuhailahPas encore d'évaluation
- Loadcases TaskDocument8 pagesLoadcases TaskMALIK TALHA ALI SAJIDPas encore d'évaluation
- OTC 19072 State of The Art in FloatoversDocument9 pagesOTC 19072 State of The Art in FloatoversNur ZaidahPas encore d'évaluation
- Barge BallastingDocument2 pagesBarge Ballastingyuvraj koshti100% (2)
- Sea TransportationDocument8 pagesSea TransportationMark Samsel RohanPas encore d'évaluation
- Double Hull Tank BargesDocument10 pagesDouble Hull Tank BargesNithin KannanPas encore d'évaluation
- (LONG) Control Trim, Stability and StressDocument4 pages(LONG) Control Trim, Stability and StressAzka Channel100% (1)
- Lessons from Template Installation MethodsDocument13 pagesLessons from Template Installation MethodssarahbstPas encore d'évaluation
- Double Hull TankersDocument57 pagesDouble Hull TankersSahil MishraPas encore d'évaluation
- 船靠船专用护舷手册 Fender - Selection - for - STS - Ops - Yokohama PDFDocument6 pages船靠船专用护舷手册 Fender - Selection - for - STS - Ops - Yokohama PDFxingangPas encore d'évaluation
- 34th-World-Congress-Panama-Full-Papers-Ports-Part-1 PIANC PDFDocument521 pages34th-World-Congress-Panama-Full-Papers-Ports-Part-1 PIANC PDFPetar SaydenovPas encore d'évaluation
- Resist en CIA de Barcazas RectangularesDocument5 pagesResist en CIA de Barcazas RectangularesFederico CurroPas encore d'évaluation
- Pontoon Vessel Passenger Crowding Stability StudyDocument12 pagesPontoon Vessel Passenger Crowding Stability StudyÐj KendePas encore d'évaluation
- Bulk Carrier ConstructionDocument5 pagesBulk Carrier Constructionreuben ephraim100% (2)
- General Intact Stability Criteria For All ShipsDocument7 pagesGeneral Intact Stability Criteria For All ShipsGiorgi KandelakiPas encore d'évaluation
- 458 JSC 190Document1 page458 JSC 190zatennePas encore d'évaluation
- c1Document32 pagesc1Andreea BurceaPas encore d'évaluation
- Bulker - Propulsion TrendsDocument15 pagesBulker - Propulsion TrendsRahil SahuPas encore d'évaluation
- CCU Design and Handling GuidelinesDocument75 pagesCCU Design and Handling Guidelinesfahril100% (2)
- Fpso Ballast System Design A Concept: Anup SrivastavaDocument13 pagesFpso Ballast System Design A Concept: Anup SrivastavaHyejune Park100% (1)
- Prospects For Hard Chine, Monohull VesselsDocument17 pagesProspects For Hard Chine, Monohull VesselsGiulia Bunn vellosoPas encore d'évaluation
- A Comparison Between Conventional Buoy Mooring CBMDocument10 pagesA Comparison Between Conventional Buoy Mooring CBMdaniellaPas encore d'évaluation
- Position Paper Bollard Loads On Port Infrastructure PIANC FinalDocument13 pagesPosition Paper Bollard Loads On Port Infrastructure PIANC FinalKhalilPas encore d'évaluation
- Safe Mooring and Cargo Handling of ShipsDocument14 pagesSafe Mooring and Cargo Handling of Shipskkchung123Pas encore d'évaluation
- Design of Mooring System of Oil Storage Barges in Shallow WaterDocument10 pagesDesign of Mooring System of Oil Storage Barges in Shallow Watermrmoh3nPas encore d'évaluation
- Fender Design Criteria GuideDocument9 pagesFender Design Criteria GuideOladunni AfolabiPas encore d'évaluation
- ANCSYSENG001Document20 pagesANCSYSENG001Tom MoritzPas encore d'évaluation
- Seamanship Ii Stress Tables and Stress Calculating EquipmentDocument29 pagesSeamanship Ii Stress Tables and Stress Calculating EquipmentCleanard Hidalgo100% (1)
- Aircraft Weight and Balance Handbook: FAA-H-8083-1AD'EverandAircraft Weight and Balance Handbook: FAA-H-8083-1AÉvaluation : 5 sur 5 étoiles5/5 (1)
- AGC AGC-CHEMICALS - Effect of Impurities On Membrane Performance & Recovery of Performance-Flemion Seminar 2012 PDFDocument59 pagesAGC AGC-CHEMICALS - Effect of Impurities On Membrane Performance & Recovery of Performance-Flemion Seminar 2012 PDFTahir KhalidPas encore d'évaluation
- Inspected by QCP Approval 1-APC 1 - APC 2 - DAR 2 - DAR Al-Handeseh 3 - Negemco 4 - Vendor 5 - Third PartyDocument4 pagesInspected by QCP Approval 1-APC 1 - APC 2 - DAR 2 - DAR Al-Handeseh 3 - Negemco 4 - Vendor 5 - Third PartyAhmad DagamsehPas encore d'évaluation
- Festo Motion Control Platform FMCP-M Powered by FPosBDocument32 pagesFesto Motion Control Platform FMCP-M Powered by FPosBgerardo floresPas encore d'évaluation
- Epf 4802 Chap 10 Heat IntegDocument92 pagesEpf 4802 Chap 10 Heat IntegMiaoluan ChanPas encore d'évaluation
- Revision of existing site plan for residential propertyDocument1 pageRevision of existing site plan for residential propertyAndrew BydderPas encore d'évaluation
- Root Mean Square ValueDocument2 pagesRoot Mean Square ValueProximo DvPas encore d'évaluation
- Developing Vietnamese Cadastral Data Standards Based On ISO 19100 (3576)Document12 pagesDeveloping Vietnamese Cadastral Data Standards Based On ISO 19100 (3576)Đại Hải ThủyPas encore d'évaluation
- Principles of Operating SystemDocument127 pagesPrinciples of Operating Systempriyanka100% (1)
- Pyrometric ConesDocument1 pagePyrometric Coneslhoffman3Pas encore d'évaluation
- NorsokDocument133 pagesNorsokNuzuliana EnuzPas encore d'évaluation
- Arihant AIEEE PhysicsDocument376 pagesArihant AIEEE PhysicsYouTibe100% (3)
- 2015 Dodge Grand Caravan SE 3.6L, V6, Gas, VIN GDocument6 pages2015 Dodge Grand Caravan SE 3.6L, V6, Gas, VIN GRafael Zuñiga TellezPas encore d'évaluation
- RFQ 3894-21Document9 pagesRFQ 3894-21ZewduErkyhunPas encore d'évaluation
- T 2 ReviewDocument5 pagesT 2 ReviewAYA707Pas encore d'évaluation
- Comparative Study of MP Birla Cement and Other Brands Marketing MixDocument122 pagesComparative Study of MP Birla Cement and Other Brands Marketing MixduTyah seerionPas encore d'évaluation
- Toggle Ram - CSS Ram Valve SetupDocument6 pagesToggle Ram - CSS Ram Valve Setupsassine khouryPas encore d'évaluation
- Material Board: - Kadambari KarmalkarDocument5 pagesMaterial Board: - Kadambari KarmalkarKADAMBARI KARMALKARPas encore d'évaluation
- Elevator Inspections FINALDocument17 pagesElevator Inspections FINALrkarlinPas encore d'évaluation
- Fuji FCR 5000 Service ManualDocument892 pagesFuji FCR 5000 Service Manualmasroork_270% (10)
- Power King Tractor Owners ManualDocument54 pagesPower King Tractor Owners ManualBryan Potter100% (2)
- Sheet 1 - RTL Part1Document2 pagesSheet 1 - RTL Part1sad birdPas encore d'évaluation
- Perfect Gas Law Lab ReportDocument9 pagesPerfect Gas Law Lab ReportTan Zu Kuan50% (2)
- Spare Parts Catalogue: Bajaj Auto LimitedDocument44 pagesSpare Parts Catalogue: Bajaj Auto LimitedRahul KhadePas encore d'évaluation
- En 10270 1 2001 Filo Per MolleDocument26 pagesEn 10270 1 2001 Filo Per MolleGizem AkelPas encore d'évaluation
- Purchase order for motors from Southern Cooling TowersDocument3 pagesPurchase order for motors from Southern Cooling TowerskaushikPas encore d'évaluation
- General Purpose Polyester Laminating Resin GuideDocument3 pagesGeneral Purpose Polyester Laminating Resin Guidewongpengchiong7205100% (1)
- Aerodynamic and Mechanical Design of An 8 - 1 Pressure Ratio Centrifugal CompressorDocument147 pagesAerodynamic and Mechanical Design of An 8 - 1 Pressure Ratio Centrifugal CompressorvincemugnaioPas encore d'évaluation
- 76 5500 1 I1Document152 pages76 5500 1 I1shawn allen100% (4)
- Performa EngineDocument26 pagesPerforma EngineAndri SetiyawanPas encore d'évaluation
- Metaltech-Automex-2019-Post-Show-Report CompressedDocument9 pagesMetaltech-Automex-2019-Post-Show-Report Compressedapi-480638034Pas encore d'évaluation