Vous aimerez peut-être aussi
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1091)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Cloudera Administrator Training Slides PDFDocument601 pagesCloudera Administrator Training Slides PDFeabernsteinPas encore d'évaluation
- Manual de Servicio 1200 STX-R (JT1200) 2004-2005Document284 pagesManual de Servicio 1200 STX-R (JT1200) 2004-2005Luis Alberto TinjacaPas encore d'évaluation
- 2016-04 DIAMETER ArchitectureDocument22 pages2016-04 DIAMETER ArchitectureVivek ShahPas encore d'évaluation
- Types of Joints in Concrete ConstructionsDocument7 pagesTypes of Joints in Concrete ConstructionsbotchPas encore d'évaluation
- Liebert Challenger 3000-3-5 Ton Installation ManualDocument76 pagesLiebert Challenger 3000-3-5 Ton Installation ManualDanyer RosalesPas encore d'évaluation
- Aero EngineDocument118 pagesAero EngineTarun Choudhary100% (1)
- English For LogisticsDocument25 pagesEnglish For LogisticsRolando Nunez100% (1)
- Crusher House OperationDocument21 pagesCrusher House Operationratan das0% (1)
- Amine Gas Sweetening Systems PsDocument3 pagesAmine Gas Sweetening Systems Pscanada_198020008918Pas encore d'évaluation
- Common Rail Fuel InjectionDocument13 pagesCommon Rail Fuel InjectionAnoj pahathkumburaPas encore d'évaluation
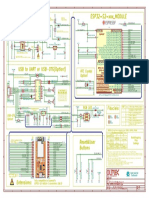
- ESP32 S2 DevKit Lipo - Rev - B1Document1 pageESP32 S2 DevKit Lipo - Rev - B1Inventor TestPas encore d'évaluation
- Experiment / Assignment / Tutorial No. 1 Grade: Aa / Ab / BB / BC / CC / CD /DD Signature of The Faculty In-Charge With DateDocument10 pagesExperiment / Assignment / Tutorial No. 1 Grade: Aa / Ab / BB / BC / CC / CD /DD Signature of The Faculty In-Charge With DateSourabhPas encore d'évaluation
- Rebar Vs AnchorDocument22 pagesRebar Vs AnchorHenry TuganoPas encore d'évaluation
- Water ClocksDocument18 pagesWater ClocksClaude Pierre SousaPas encore d'évaluation
- Installation Instructions USB v1.0.21Document3 pagesInstallation Instructions USB v1.0.21Luis Alvaro MolinaPas encore d'évaluation
- Standard Techniques of Stress Corrosion Cracking Testing - A ReviewDocument15 pagesStandard Techniques of Stress Corrosion Cracking Testing - A ReviewMarly Blanco VeraPas encore d'évaluation
- 2gr TorqueDocument3 pages2gr TorqueDouglasArayaPas encore d'évaluation
- Arch 2-2 QuestionnairesDocument11 pagesArch 2-2 QuestionnairesGels GenovaPas encore d'évaluation
- TB 10301-2009 Technical Spicification For Basic Operation Safety of Railway EngineeringDocument133 pagesTB 10301-2009 Technical Spicification For Basic Operation Safety of Railway EngineeringHENDROPas encore d'évaluation
- Desalter Package 1.2 User ManualDocument10 pagesDesalter Package 1.2 User ManualPervaiz RizviPas encore d'évaluation
- #Omega DPG409Document3 pages#Omega DPG409Cyrix.OnePas encore d'évaluation
- SumitomoDocument170 pagesSumitomoLuis Ruben Torres QuispePas encore d'évaluation
- EDITED Module 1 5 UsedDocument55 pagesEDITED Module 1 5 UsedLenb AntonioPas encore d'évaluation
- Tension Wheel Assemblies: Sicat 8WL5070 / 8WL5078 For Overhead Contact Line SystemsDocument4 pagesTension Wheel Assemblies: Sicat 8WL5070 / 8WL5078 For Overhead Contact Line SystemsVictor Manuel BonettoPas encore d'évaluation
- AMP PIP Test ManualDocument8 pagesAMP PIP Test ManualknjizaraknjigaPas encore d'évaluation
- SIEMENS Manfred Pohl 20120523cigre2012Document23 pagesSIEMENS Manfred Pohl 20120523cigre2012suraiyya begumPas encore d'évaluation
- Sr. No. - 28 Ward No. - 24 PAINTING, ELECTRIFICATION & FURNITURE OF SIDDHARUTH MULTIPURPOSE HALLDocument13 pagesSr. No. - 28 Ward No. - 24 PAINTING, ELECTRIFICATION & FURNITURE OF SIDDHARUTH MULTIPURPOSE HALLnajuka ghodvindePas encore d'évaluation
- List of Useful Keyboard Shortcuts For Command Prompt in WindowsDocument7 pagesList of Useful Keyboard Shortcuts For Command Prompt in WindowsMahmudul HasanPas encore d'évaluation
- SQL Exercise-Text Book Table: DepartmentDocument22 pagesSQL Exercise-Text Book Table: DepartmentRafiq BashaPas encore d'évaluation
- 142 Manual Final Fall 2003 Body OnlyDocument118 pages142 Manual Final Fall 2003 Body Onlyjlehman100% (1)