Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- 2003 1-Art 17Document15 pages2003 1-Art 17Maria RitaPas encore d'évaluation
- D.iffusion Processes Influenced Coniugate-Point Wave PhenomenaDocument5 pagesD.iffusion Processes Influenced Coniugate-Point Wave PhenomenaMaria RitaPas encore d'évaluation
- Magnetic Coordinate Systems: K.M. LaundalDocument33 pagesMagnetic Coordinate Systems: K.M. LaundalMaria RitaPas encore d'évaluation
- Radial Distributions of Equatorial Phase Space Density For Outer Radiation Belt ElectronsDocument7 pagesRadial Distributions of Equatorial Phase Space Density For Outer Radiation Belt ElectronsMaria RitaPas encore d'évaluation
- The Aastex L TEX 2ε Macros for Manuscript PreparationDocument16 pagesThe Aastex L TEX 2ε Macros for Manuscript PreparationMaria RitaPas encore d'évaluation
- 462759Document410 pages462759Dian Ahmad BudianaPas encore d'évaluation
- Pimple 2002Document15 pagesPimple 2002Maria RitaPas encore d'évaluation
- 10.1038@scientificamerican0975 160Document14 pages10.1038@scientificamerican0975 160Maria RitaPas encore d'évaluation
- Ethics and The Welfare of The Physics Profession: Kate Kirby Frances A. HouleDocument6 pagesEthics and The Welfare of The Physics Profession: Kate Kirby Frances A. HouleMaria RitaPas encore d'évaluation
- Research ArticleDocument14 pagesResearch ArticleMaria RitaPas encore d'évaluation
- Magnetospheric Substorms: OooqooqDocument6 pagesMagnetospheric Substorms: OooqooqMaria RitaPas encore d'évaluation
- 10 1 1 202 2582 PDFDocument18 pages10 1 1 202 2582 PDFMaria RitaPas encore d'évaluation
- Using The Amsthm Package: Version 2.07, 2000/06/02 American Mathematical SocietyDocument4 pagesUsing The Amsthm Package: Version 2.07, 2000/06/02 American Mathematical SocietyMaria RitaPas encore d'évaluation
- Boomerang DynamicsDocument8 pagesBoomerang DynamicsMaria RitaPas encore d'évaluation
- Tensor InertiaDocument5 pagesTensor InertiaMaria RitaPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Recent Developments in Automatic Die Design For Profile ExtrusionDocument10 pagesRecent Developments in Automatic Die Design For Profile ExtrusionLucas ValentimPas encore d'évaluation
- SUMO Simulation of Urban MObility An Open-Source TDocument6 pagesSUMO Simulation of Urban MObility An Open-Source TAntonio HurbelPas encore d'évaluation
- Random Subcubes As A Toy Model For Constraint Satisfaction Problems. Mora ZdeborovaDocument22 pagesRandom Subcubes As A Toy Model For Constraint Satisfaction Problems. Mora ZdeborovaImperatur PeregrinusPas encore d'évaluation
- Fuzzy Differential Evolution AlgorithmDocument118 pagesFuzzy Differential Evolution AlgorithmSakthivelan RamachandranPas encore d'évaluation
- Abhinav Pratap Singh, Divakar Vashisth, Shalivahan SrivastavaDocument1 pageAbhinav Pratap Singh, Divakar Vashisth, Shalivahan SrivastavaSakshi MalhotraPas encore d'évaluation
- UntitledDocument248 pagesUntitledAliah Gie ZabalaPas encore d'évaluation
- Aimms ModelingDocument305 pagesAimms ModelingeepioneerPas encore d'évaluation
- Course File CAD VLSIDocument84 pagesCourse File CAD VLSIBharti SharmaPas encore d'évaluation
- Kai Labusch, Erhardt Barth and Thomas Martinetz - Learning Data Representations With Sparse Coding Neural GasDocument6 pagesKai Labusch, Erhardt Barth and Thomas Martinetz - Learning Data Representations With Sparse Coding Neural GasTuhmaPas encore d'évaluation
- Modeling Uncertainty 0792374630 PDFDocument781 pagesModeling Uncertainty 0792374630 PDFEd Gar YundaPas encore d'évaluation
- Final Thesis More CompressedDocument232 pagesFinal Thesis More CompressedAhmad AlAwdahPas encore d'évaluation
- LevineDocument59 pagesLevinesaipavan999Pas encore d'évaluation
- WaterGEMS V8i User's GuideDocument1 380 pagesWaterGEMS V8i User's Guideilie_alex90% (20)
- Operations Analytics NotesDocument75 pagesOperations Analytics NotesNirav BhanushaliPas encore d'évaluation
- Artigo Revisao EJLTDocument26 pagesArtigo Revisao EJLTRoberta RochaPas encore d'évaluation
- A Critical Review in Constructal Theory PDFDocument12 pagesA Critical Review in Constructal Theory PDFRui GalvaniPas encore d'évaluation
- Issyll6 PDFDocument20 pagesIssyll6 PDFBradley GarciaPas encore d'évaluation
- The Role of Boards of Directors in Corporate GovernanceDocument60 pagesThe Role of Boards of Directors in Corporate GovernanceJiaqi JiPas encore d'évaluation
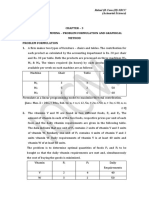
- Chapter - 3 Linear Programming - Problem Formulation and Graphical Method Problem Formulation 1. A Firm Makes Two Types of Furniture - Chairs and Tables. The Contribution ForDocument11 pagesChapter - 3 Linear Programming - Problem Formulation and Graphical Method Problem Formulation 1. A Firm Makes Two Types of Furniture - Chairs and Tables. The Contribution ForYamica ChopraPas encore d'évaluation
- Ieee Transactions Power Delivery, Volume 3, July 1988: TlwalDocument8 pagesIeee Transactions Power Delivery, Volume 3, July 1988: TlwalRonanPas encore d'évaluation
- Bsbinm601 Copy 1Document13 pagesBsbinm601 Copy 1sayan goswami75% (4)
- Mic2003 LBDocument101 pagesMic2003 LBlei liPas encore d'évaluation
- Supplier Evaluation The First Step in Effective SoDocument4 pagesSupplier Evaluation The First Step in Effective SoShatender kumar Kumar100% (1)
- Berkeley Postgraduate CoursesDocument36 pagesBerkeley Postgraduate CoursesBlackPhoinixPas encore d'évaluation
- Apps Stat and Optimization Models Homework 1 Over Chapter 2 Book ProblemsDocument8 pagesApps Stat and Optimization Models Homework 1 Over Chapter 2 Book ProblemsxandercagePas encore d'évaluation
- M.Tech (CIVIL) Structural Engineering PDFDocument12 pagesM.Tech (CIVIL) Structural Engineering PDFSiriveri Lakshmi KanthPas encore d'évaluation
- ContentsDocument14 pagesContentsDarlene BrockPas encore d'évaluation
- At-04304-Aspen ELearning Catalog 0918Document57 pagesAt-04304-Aspen ELearning Catalog 0918jimmPas encore d'évaluation
- Local Kriging Neighbourhood Optimisation - SnowdenDocument9 pagesLocal Kriging Neighbourhood Optimisation - Snowdenh100% (1)