Vous aimerez peut-être aussi
- 5.2 PneumatiqueDocument5 pages5.2 PneumatiqueNicola VitulliPas encore d'évaluation
- Rapport Pneu FinalDocument9 pagesRapport Pneu FinalIhssane Maroune100% (1)
- Distribuer TCT ElevDocument5 pagesDistribuer TCT ElevMohamed LarbiPas encore d'évaluation
- 7-Distribuer PneuDocument10 pages7-Distribuer Pneuommasa2006Pas encore d'évaluation
- Pompe & Compresseur Préparation ExamDocument7 pagesPompe & Compresseur Préparation ExamISMAILPas encore d'évaluation
- Mini ProjetDocument21 pagesMini ProjetJarboui BessemPas encore d'évaluation
- CH1 - Systèmes AutomatisésDocument36 pagesCH1 - Systèmes AutomatisésAimad BenaamerPas encore d'évaluation
- Cours PneuDocument7 pagesCours PneuKhalid TemsamaniPas encore d'évaluation
- TP 30.1 Circuits Pneumatique Et Électrique (Automsim)Document3 pagesTP 30.1 Circuits Pneumatique Et Électrique (Automsim)nadPas encore d'évaluation
- DM02 SujetDocument22 pagesDM02 SujetSami BennourPas encore d'évaluation
- TP1 L3 Initiation PneumDocument6 pagesTP1 L3 Initiation PneumAnass El OuedaniPas encore d'évaluation
- Hamitouche ElhachemiDocument65 pagesHamitouche ElhachemiMohamed HaddadPas encore d'évaluation
- GTIER-EMSI 27 - Hydraulique Industrielle Et Pneumatique - Polycopié PédagogiqueDocument80 pagesGTIER-EMSI 27 - Hydraulique Industrielle Et Pneumatique - Polycopié Pédagogiquemarchich.mehdi1999Pas encore d'évaluation
- Actionneurs Chap2 VérinDocument22 pagesActionneurs Chap2 VérinAmi NePas encore d'évaluation
- BST-BLANC - CM - (Projet+Mécanique Appliquée) REVUDocument12 pagesBST-BLANC - CM - (Projet+Mécanique Appliquée) REVURocky EloungouPas encore d'évaluation
- Impact-Vanne-Barrage STI2DDocument5 pagesImpact-Vanne-Barrage STI2Dyfcgh75d9cPas encore d'évaluation
- (Tec) (CO) Hydraulique PneumatiqueDocument15 pages(Tec) (CO) Hydraulique Pneumatiquehalim otmanePas encore d'évaluation
- TP2 PneumatiqueDocument12 pagesTP2 PneumatiqueredasoulhiPas encore d'évaluation
- Actionneurs Et PreactionneursDocument6 pagesActionneurs Et PreactionneursAnass KalaliPas encore d'évaluation
- Pneu QCM PDFDocument3 pagesPneu QCM PDFYoussef YoussefPas encore d'évaluation
- Cours Machines HydrauliquesDocument52 pagesCours Machines HydrauliquesDédé KambalaPas encore d'évaluation
- Actionneurs Chap3 DistributeurDocument12 pagesActionneurs Chap3 DistributeurBlaise sadioPas encore d'évaluation
- ChauffageDocument171 pagesChauffageAbdelouahab Lamzouki100% (2)
- DC1 2sc3 2021 2022Document4 pagesDC1 2sc3 2021 2022TarekMostaphaPas encore d'évaluation
- Projet AUTODocument14 pagesProjet AUTOAmir Na DzPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie - 1ère AS (2009-2010)Document0 pageDevoir de Contrôle N°1 - Technologie - 1ère AS (2009-2010)saded05Pas encore d'évaluation
- Fonction DistribuerDocument10 pagesFonction DistribuerProfesseur BoughrietPas encore d'évaluation
- Projet Pneumatique 1Document14 pagesProjet Pneumatique 1Amir Na Dz100% (1)
- CHP1 Contexte Du ProjetDocument11 pagesCHP1 Contexte Du ProjetOussema JouiniPas encore d'évaluation
- c84 Schematisation Hydraulique Et PneumatiqueDocument5 pagesc84 Schematisation Hydraulique Et PneumatiqueHoussine Adam100% (1)
- 36-App09-PERCEUSE SENSITIVEDocument2 pages36-App09-PERCEUSE SENSITIVENabil Ouled AhmedPas encore d'évaluation
- Introduction Hydraulique v4Document26 pagesIntroduction Hydraulique v4Mode FurtifPas encore d'évaluation
- Balouldj AmirDocument110 pagesBalouldj Amirdavid chambersPas encore d'évaluation
- Distribuer L'énergie Pneumatique/hydrauliqueDocument25 pagesDistribuer L'énergie Pneumatique/hydrauliqueilias jejePas encore d'évaluation
- Dimensionnement D'une Installation Photovoltaïque Pour Un Site BTS BSC Du Réseau Télécom WataniaDocument94 pagesDimensionnement D'une Installation Photovoltaïque Pour Un Site BTS BSC Du Réseau Télécom Wataniakialohabib10Pas encore d'évaluation
- Pompe TriplexDocument23 pagesPompe TriplexBac mathPas encore d'évaluation
- ChauffageDocument173 pagesChauffageBachir FethizaPas encore d'évaluation
- Industrial ManagementDocument9 pagesIndustrial ManagementEthan DonovanPas encore d'évaluation
- 2-Hydraulique-Industriel 1Document57 pages2-Hydraulique-Industriel 1Matar DIOUFPas encore d'évaluation
- CI8 - C04 Schemas Hydrauliques Et Pneumatiques - v20Document4 pagesCI8 - C04 Schemas Hydrauliques Et Pneumatiques - v20moustaphajawara98Pas encore d'évaluation
- 2013 N KkkoDocument19 pages2013 N Kkkositescompte4Pas encore d'évaluation
- Devoir 2 Modele 1 Si 2 Bac SM B Semestre 2Document21 pagesDevoir 2 Modele 1 Si 2 Bac SM B Semestre 2lemsouguerPas encore d'évaluation
- Expo HydroDocument36 pagesExpo HydroArlPas encore d'évaluation
- Corrigé TSDEEA 1ADocument5 pagesCorrigé TSDEEA 1AOualid Ouadoudi88% (8)
- Devoir Session de Formation Lecture de Schemas HydrauliquesDocument3 pagesDevoir Session de Formation Lecture de Schemas HydrauliquesHernest FerraPas encore d'évaluation
- Exercices RedressementDocument4 pagesExercices RedressementCheikh Sidya AidaraPas encore d'évaluation
- EXAMEN FINAL DE MAINTENANCE DES EQUIPEMENTS ELECTRO MECA MIP2 - Copie BonDocument4 pagesEXAMEN FINAL DE MAINTENANCE DES EQUIPEMENTS ELECTRO MECA MIP2 - Copie BonsomomarctinoPas encore d'évaluation
- Chapitre 1 Les Transmissions FluidesDocument15 pagesChapitre 1 Les Transmissions FluidesAYOUB MAMAOUI100% (1)
- TP 2Document9 pagesTP 2ibrahim rabbajPas encore d'évaluation
- Capteurs Actionneurs Systèmes AutomatisésDocument35 pagesCapteurs Actionneurs Systèmes AutomatisésMohammed ALMUSHIAA100% (1)
- Part3-Mémo - Courbes Réseau Rappel ThéorieDocument7 pagesPart3-Mémo - Courbes Réseau Rappel ThéorieredouanePas encore d'évaluation
- Ch22 Les Preactionneurs PneumatiquesDocument4 pagesCh22 Les Preactionneurs PneumatiquesLuka Madrid100% (3)
- Devoir de Contrôle N°1 - Technologie - Machine À Coller Les Étiquettes - 2ème Sciences (2018-2019) MR Dhifaoui AbdelwahebDocument4 pagesDevoir de Contrôle N°1 - Technologie - Machine À Coller Les Étiquettes - 2ème Sciences (2018-2019) MR Dhifaoui Abdelwahebelyes mleykiPas encore d'évaluation
- Rapport de Stage FinaleDocument15 pagesRapport de Stage FinaleOussama DaoudiPas encore d'évaluation
- CI6 Schemas Hydrauliques Et PneumatiquesDocument4 pagesCI6 Schemas Hydrauliques Et PneumatiquesBob MinkaPas encore d'évaluation
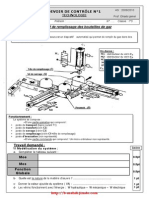
- Devoir de Contrôle N°1 - Technologie Poste de remplissage des barils de lessive - 1ère AS (2013-2014) Mr Mighri LotfiDocument3 pagesDevoir de Contrôle N°1 - Technologie Poste de remplissage des barils de lessive - 1ère AS (2013-2014) Mr Mighri Lotfiahmed tounsiPas encore d'évaluation
- M202-Chaudieres Et Reseaux VapeurDocument153 pagesM202-Chaudieres Et Reseaux Vapeurzakaria.ockarPas encore d'évaluation
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Cours Technologie Doc ÉlèveDocument64 pagesCours Technologie Doc ÉlèveSaid MaatiPas encore d'évaluation
- Entreprises À TangerDocument23 pagesEntreprises À TangerJohn Smith100% (2)
- Aicha RecrutementDocument1 pageAicha RecrutementSaid MaatiPas encore d'évaluation
- C Blage Entr Es Sorties AutomateDocument3 pagesC Blage Entr Es Sorties AutomateSaid MaatiPas encore d'évaluation
- Dimensionnement Des Composants Pour Convertisseur SEPIC PDFDocument20 pagesDimensionnement Des Composants Pour Convertisseur SEPIC PDFSaid MaatiPas encore d'évaluation
- LES AUTOMATES PROGRAMMABLES INDUSTRIELS Pour GEEADocument17 pagesLES AUTOMATES PROGRAMMABLES INDUSTRIELS Pour GEEAMohamed Faraji Bakkali MangatPas encore d'évaluation
- Utilisation de S7Document8 pagesUtilisation de S7Mabrouka LinuxPas encore d'évaluation
- Béton LégerDocument6 pagesBéton LégerSaid MaatiPas encore d'évaluation
- ConteneurmerDocument4 pagesConteneurmerapi-3778102100% (1)
- Le Probleme Du Sac A DosDocument8 pagesLe Probleme Du Sac A DosSaid MaatiPas encore d'évaluation
- TD4 Circuit CombinatoireDocument4 pagesTD4 Circuit CombinatoireAbd OUPas encore d'évaluation
- 496specificationsFR TransmeetteurDocument10 pages496specificationsFR TransmeetteurFares BencheikhPas encore d'évaluation
- These MouhamadDocument226 pagesThese MouhamadalainPas encore d'évaluation
- Q1 ManualDocument157 pagesQ1 Manualdanp12345Pas encore d'évaluation
- Microscopie STMDocument7 pagesMicroscopie STMHugo VasconcelosPas encore d'évaluation
- TP 1 AsserDocument8 pagesTP 1 AsserWalid DjouzaPas encore d'évaluation
- Cours Pal STS PDFDocument14 pagesCours Pal STS PDFpioPas encore d'évaluation
- FOX515 99 French PDFDocument35 pagesFOX515 99 French PDFSalvador FayssalPas encore d'évaluation
- Symboles ÉlectroniquesDocument9 pagesSymboles ÉlectroniquesArounan Dembele100% (1)
- Asservissement de NiveauDocument28 pagesAsservissement de NiveauMohamed Oulad100% (1)
- Appareillage RXDocument15 pagesAppareillage RXDanem HalasPas encore d'évaluation
- Puissance en Regime SinusoidalDocument2 pagesPuissance en Regime Sinusoidalkinatiori herve OuattaraPas encore d'évaluation
- Exercices 4e Fractions3Document2 pagesExercices 4e Fractions3verts.smartiesPas encore d'évaluation
- CHAP II - TRANSISTOR BIPOLAIRE 2 OK (10p) PDFDocument10 pagesCHAP II - TRANSISTOR BIPOLAIRE 2 OK (10p) PDFAli OuattaraPas encore d'évaluation
- Commande D'un Four Éléctrique GR 6Document44 pagesCommande D'un Four Éléctrique GR 6حسام الدينPas encore d'évaluation
- Caylus - Aide de JeuDocument3 pagesCaylus - Aide de Jeuclop1Pas encore d'évaluation
- Techniques Prod H2 WebDocument54 pagesTechniques Prod H2 Weblabdelkader84_988998Pas encore d'évaluation
- Traduction Don SmithDocument23 pagesTraduction Don SmithAnonymous jLIj43ZWcG100% (1)
- Série Dexercice - Chapitre 3Document4 pagesSérie Dexercice - Chapitre 3kima lachgar100% (1)
- TV LG 42ln570sDocument5 pagesTV LG 42ln570srino8Pas encore d'évaluation
- Notice de Montage BeSolar! V2Document13 pagesNotice de Montage BeSolar! V2Cyril NoirtinPas encore d'évaluation
- Automate Programmable PDFDocument16 pagesAutomate Programmable PDFAit El Caid AbdellatifPas encore d'évaluation
- VITA 10000 10000F V60-i-Line GA FR V03 Screen FRDocument36 pagesVITA 10000 10000F V60-i-Line GA FR V03 Screen FRLammari LamriPas encore d'évaluation
- Exo SLTDocument6 pagesExo SLTRyan HjPas encore d'évaluation
- Filtre Passif RLCDocument45 pagesFiltre Passif RLCKarima HamdanPas encore d'évaluation
- I I Z I: Exercice 1Document6 pagesI I Z I: Exercice 1pedro66100% (2)
- Presentation TGBT CapDocument17 pagesPresentation TGBT CapAbderrahmane BinPas encore d'évaluation
- Canaux de ContrôlDocument8 pagesCanaux de ContrôlAbdelkarim MegdichPas encore d'évaluation
- TestDocument5 pagesTestNacer MaatiPas encore d'évaluation
- Cahier Des ChargesDocument3 pagesCahier Des ChargesFteiti MondherPas encore d'évaluation