Vous aimerez peut-être aussi
- Corrigé de Chimie 2022Document6 pagesCorrigé de Chimie 2022chakir mohammed0% (1)
- Preparation Concours2020 Cinetique FormulaireDocument7 pagesPreparation Concours2020 Cinetique FormulaireNowe AhmadePas encore d'évaluation
- PC PHYSIQUE CENTRALE 1 2002.extraitDocument4 pagesPC PHYSIQUE CENTRALE 1 2002.extraitNadaPas encore d'évaluation
- Enoncé.: M5.4. Oscillations Forcées D'un Véhicule Sur Une Route OnduléeDocument3 pagesEnoncé.: M5.4. Oscillations Forcées D'un Véhicule Sur Une Route OnduléeCristopher RolandoPas encore d'évaluation
- ELCIN - 05 Filtre de Rauch Passe BandeDocument5 pagesELCIN - 05 Filtre de Rauch Passe BandeMohamed ElankoudPas encore d'évaluation
- Force Exercée Par Un Jet Sur Un Obstacle: 1. ObjectifDocument9 pagesForce Exercée Par Un Jet Sur Un Obstacle: 1. ObjectifMoslem Zariat100% (1)
- TD 19 Corrigé - Loi Entrée-Sortie Par Fermeture CinématiqueDocument6 pagesTD 19 Corrigé - Loi Entrée-Sortie Par Fermeture CinématiqueMohamed AbaakilPas encore d'évaluation
- TD 06 Corrigé - Comportement Temporel Des SLCI Du 2ème OrdreDocument10 pagesTD 06 Corrigé - Comportement Temporel Des SLCI Du 2ème OrdreMohamed AbaakilPas encore d'évaluation
- Avicen 1 PDFDocument199 pagesAvicen 1 PDFIvo da Costa100% (2)
- Conception Chretienne de L'histoireDocument11 pagesConception Chretienne de L'histoireloic maworaPas encore d'évaluation
- Séries Numériques 17Document73 pagesSéries Numériques 17Anonymous mq6GyX3rjPas encore d'évaluation
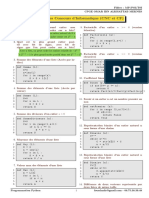
- Classiques en InformatiqueDocument2 pagesClassiques en InformatiqueElkarni SoumayaPas encore d'évaluation
- DL2 EnonDocument3 pagesDL2 EnonLucas huzvdcbPas encore d'évaluation
- Porojectle Cours-1Document5 pagesPorojectle Cours-1Mehdi BnmssdPas encore d'évaluation
- Série+d'Exercices+ +Physique+Dipole+RC+ +Bac+Mathématiques+ (2012 2013) +Mr+AfdalDocument7 pagesSérie+d'Exercices+ +Physique+Dipole+RC+ +Bac+Mathématiques+ (2012 2013) +Mr+AfdalWiem BenchahbounPas encore d'évaluation
- Devoir de Synthèse N°2 2007 2008 (Moknine Monastir)Document3 pagesDevoir de Synthèse N°2 2007 2008 (Moknine Monastir)Omar MakhPas encore d'évaluation
- TP OptiqueDocument21 pagesTP OptiqueHassna OuissoumourPas encore d'évaluation
- Correction TD2 IMT2!21!22Document14 pagesCorrection TD2 IMT2!21!22WISSAL JANAPas encore d'évaluation
- CPAV-Rep-Ex1 Emb-Frein PDFDocument3 pagesCPAV-Rep-Ex1 Emb-Frein PDFoumaima ghzPas encore d'évaluation
- Sec Minesponts 2005 Chicp PSIDocument4 pagesSec Minesponts 2005 Chicp PSInouredine1989Pas encore d'évaluation
- Ds 1 MP 2022Document3 pagesDs 1 MP 2022mehdi benmassoudPas encore d'évaluation
- 08 Fiche Suites Series FctsDocument5 pages08 Fiche Suites Series Fctsayoub elPas encore d'évaluation
- Integrales GénéraliséesDocument2 pagesIntegrales GénéraliséeskhayyamPas encore d'évaluation
- 15 Formule D Euler Mac LaurinDocument5 pages15 Formule D Euler Mac LaurinSAM MANPas encore d'évaluation
- Devoir de Synthèse N°2 - Math - Bac Sciences Exp (2011-2012) MR Maatallah - pdf1Document2 pagesDevoir de Synthèse N°2 - Math - Bac Sciences Exp (2011-2012) MR Maatallah - pdf1Mohamed SaidiPas encore d'évaluation
- Prob 21402Document8 pagesProb 21402Ayoüb Sou UadPas encore d'évaluation
- ProblèmesDocument45 pagesProblèmesYassine ErrakkasPas encore d'évaluation
- Proba Exo7Document4 pagesProba Exo7Ayou HamPas encore d'évaluation
- Devoir 3 Modele 2 Si 2 Bac SM B Semestre 2Document7 pagesDevoir 3 Modele 2 Si 2 Bac SM B Semestre 2lemsouguerPas encore d'évaluation
- FormulesDocument5 pagesFormuleshajarPas encore d'évaluation
- CNC 2011 CorrigéDocument23 pagesCNC 2011 CorrigéImad NAKHI100% (1)
- 117 Serie Mecanique Du Point SMPC Smia s1 Cinematique Changement ReferentielDocument9 pages117 Serie Mecanique Du Point SMPC Smia s1 Cinematique Changement ReferentielMohamed MezianiPas encore d'évaluation
- ComparaisonDocument9 pagesComparaisonMaria Jose de las mercedes Costa AzulPas encore d'évaluation
- Mécanisme Fin 5Document78 pagesMécanisme Fin 5akarne YounessPas encore d'évaluation
- TD28 CorrectionDocument8 pagesTD28 CorrectionWasfi ZakariaPas encore d'évaluation
- Devoir de Contrôle N°1 - Math - Bac Technique (2020-2021) MR KHLIFIDocument2 pagesDevoir de Contrôle N°1 - Math - Bac Technique (2020-2021) MR KHLIFIDhia CherniPas encore d'évaluation
- 5-Fonction Digamma CorrectionDocument10 pages5-Fonction Digamma Correctionfrançois dupontPas encore d'évaluation
- Integrale GaussDocument2 pagesIntegrale GaussSergePas encore d'évaluation
- Polynômes de Chebyshev Et Théorème de WeiertrassDocument6 pagesPolynômes de Chebyshev Et Théorème de WeiertrassAly OUEDRAOGOPas encore d'évaluation
- DL 1 Spe MP Rs Oct.22Document8 pagesDL 1 Spe MP Rs Oct.22Ibrahim OmraniPas encore d'évaluation
- 04 Sigma CorrigeDocument6 pages04 Sigma CorrigeAbdellah MazighiPas encore d'évaluation
- CNC 2014 Physique-1 TSI CorrectionDocument7 pagesCNC 2014 Physique-1 TSI CorrectionAhmed AblPas encore d'évaluation
- 1-Mouvement D - Un Point Sur Un Rail Circulaire CorrectionDocument3 pages1-Mouvement D - Un Point Sur Un Rail Circulaire CorrectionOmar OuPas encore d'évaluation
- Correction Centrale RéductionDocument8 pagesCorrection Centrale RéductionAlessandro AmalricPas encore d'évaluation
- Examens National 2bac Sci Genieur SMB 2012 R PDFDocument27 pagesExamens National 2bac Sci Genieur SMB 2012 R PDFHanane TounsiPas encore d'évaluation
- 12.2 - Decrement LogarithmiqueDocument2 pages12.2 - Decrement LogarithmiqueMohamed El GlafiPas encore d'évaluation
- TD Dynamique Du Point MatérielDocument4 pagesTD Dynamique Du Point Matérielyahya El MfPas encore d'évaluation
- Dérivation Et Etude Des FonctionsDocument5 pagesDérivation Et Etude Des FonctionsGueye OusmanePas encore d'évaluation
- Devoir n5 Rattrapage 2018Document2 pagesDevoir n5 Rattrapage 2018Lambert Kadjo100% (1)
- CI02 TD05 Corrigé - Imposer Une VitesseDocument6 pagesCI02 TD05 Corrigé - Imposer Une VitesseKhaled JberiPas encore d'évaluation
- Serie Phy2 2021Document4 pagesSerie Phy2 2021Farid BelalPas encore d'évaluation
- Controle Jan 2014Document2 pagesControle Jan 2014HossamEddinPas encore d'évaluation
- Acetates5 (Integrales Complexes)Document7 pagesAcetates5 (Integrales Complexes)Eng. NKURUNZIZA ApollinairePas encore d'évaluation
- EC3 RLC SerieDocument10 pagesEC3 RLC SeriejihenePas encore d'évaluation
- CCP 2014 MP m1 CorrigeDocument7 pagesCCP 2014 MP m1 CorrigeSalim ErrabiiPas encore d'évaluation
- Examen Statique Des Solides 2013Document7 pagesExamen Statique Des Solides 2013vinc giniPas encore d'évaluation
- Exercices en Meca Rar PDFDocument2 pagesExercices en Meca Rar PDFMohammed Bouchelarm100% (1)
- 06.3 - Pont de WienDocument3 pages06.3 - Pont de WienAchraf MoutaharPas encore d'évaluation
- Transformée de Fourier: Exercice 1Document2 pagesTransformée de Fourier: Exercice 1Salma NPas encore d'évaluation
- 038 - Etude D'une Equation Fonctionnelle 2Document2 pages038 - Etude D'une Equation Fonctionnelle 2David KonanPas encore d'évaluation
- La théorie des jeux: Thrillers judiciaires de Katerina Carter, #2D'EverandLa théorie des jeux: Thrillers judiciaires de Katerina Carter, #2Pas encore d'évaluation
- TD N°13 1CPI Modélisation Des AM de Frottement - Lois de CoulombDocument1 pageTD N°13 1CPI Modélisation Des AM de Frottement - Lois de Coulombayoubizwika.75Pas encore d'évaluation
- Exampg 1Document4 pagesExampg 1نجم المعلوماتPas encore d'évaluation
- Chap 4Document9 pagesChap 4MartinPas encore d'évaluation
- TDN 5Document4 pagesTDN 5Mohamed AbaakilPas encore d'évaluation
- TD 28 - PFS Résolution GraphiqueDocument8 pagesTD 28 - PFS Résolution GraphiqueMohamed AbaakilPas encore d'évaluation
- TD20 CorrectionDocument8 pagesTD20 CorrectionMohamed AbaakilPas encore d'évaluation
- TD20Document10 pagesTD20Mohamed AbaakilPas encore d'évaluation
- TD 27 - Modélisation Des AM de Contact PonctuelDocument6 pagesTD 27 - Modélisation Des AM de Contact PonctuelMohamed AbaakilPas encore d'évaluation
- TD 29 Corrigé - Arc-BoutementDocument8 pagesTD 29 Corrigé - Arc-BoutementMohamed AbaakilPas encore d'évaluation
- TD 35 - Systèmes Séquentiels - GRAFCET - Structure Particulière - Grafcet Partiel - CompteurDocument6 pagesTD 35 - Systèmes Séquentiels - GRAFCET - Structure Particulière - Grafcet Partiel - CompteurMohamed AbaakilPas encore d'évaluation
- TD1 4Document4 pagesTD1 4Mohamed AbaakilPas encore d'évaluation
- TD 29 - Arc-BoutementDocument7 pagesTD 29 - Arc-BoutementMohamed AbaakilPas encore d'évaluation
- TD 28 Corrigé - PFS Résolution GraphiqueDocument14 pagesTD 28 Corrigé - PFS Résolution GraphiqueMohamed AbaakilPas encore d'évaluation
- TD 27 Corrigé - Modélisation Des AM de Contact PonctuelDocument8 pagesTD 27 Corrigé - Modélisation Des AM de Contact PonctuelMohamed AbaakilPas encore d'évaluation
- TD 05 Corrigé - Comportement Temporel Des SLCI Proportionnel, Dérivateur, Intégrateur Et Du 1er OrdreDocument6 pagesTD 05 Corrigé - Comportement Temporel Des SLCI Proportionnel, Dérivateur, Intégrateur Et Du 1er OrdreMohamed AbaakilPas encore d'évaluation
- TD 13 - Cinématique Graphique - Toutes Les Méthodes en Même TempsDocument3 pagesTD 13 - Cinématique Graphique - Toutes Les Méthodes en Même TempsMohamed AbaakilPas encore d'évaluation
- TD 06 - Comportement Temporel Des SLCI Du 2ème OrdreDocument8 pagesTD 06 - Comportement Temporel Des SLCI Du 2ème OrdreMohamed AbaakilPas encore d'évaluation
- TD 05 - Comportement Temporel Des SLCI Proportionnel, Dérivateur, Intégrateur Et Du 1er OrdreDocument4 pagesTD 05 - Comportement Temporel Des SLCI Proportionnel, Dérivateur, Intégrateur Et Du 1er OrdreMohamed AbaakilPas encore d'évaluation
- TD 04 - Représentation Des SLCI (FT + Schémas Blocs) - SLCI AsservisDocument4 pagesTD 04 - Représentation Des SLCI (FT + Schémas Blocs) - SLCI AsservisMohamed AbaakilPas encore d'évaluation
- TD 02 Corrigé - Organisation Structurelle Des SystèmesDocument6 pagesTD 02 Corrigé - Organisation Structurelle Des SystèmesMohamed AbaakilPas encore d'évaluation
- Grue ToursDocument13 pagesGrue Tourskale08100% (1)
- IMIPENEMEDocument26 pagesIMIPENEMELinaMimosaPas encore d'évaluation
- PCT Blanc Borgou BAC CDocument4 pagesPCT Blanc Borgou BAC CEmmanuel WAGNONPas encore d'évaluation
- Signal Électrique Et ÉlectroniqueDocument13 pagesSignal Électrique Et ÉlectroniqueLittl LotusPas encore d'évaluation
- 4 LES TECHNIQUES DEMPREINTE EN PPA. DR KASSOURI L.FDocument51 pages4 LES TECHNIQUES DEMPREINTE EN PPA. DR KASSOURI L.FImoona iiPas encore d'évaluation
- OK Les Equilibres Naturels ActivitesDocument8 pagesOK Les Equilibres Naturels ActivitesANIME SHOWPas encore d'évaluation
- Rapport de StageDocument59 pagesRapport de StageFarid Abdul Ogbe50% (2)
- Théorème de ThalèsDocument9 pagesThéorème de ThalèsSebastien mutudiemuPas encore d'évaluation
- VSM Ev91Document21 pagesVSM Ev91zouaoua slimanePas encore d'évaluation
- Stampe Bucuresti PDFDocument42 pagesStampe Bucuresti PDFSebastian Stan100% (2)
- Chapitre 3 Politique PrixDocument3 pagesChapitre 3 Politique PrixIhssane MouliPas encore d'évaluation
- Mémoire Fin D'etude de Master II en Supply Chain ManagementDocument78 pagesMémoire Fin D'etude de Master II en Supply Chain ManagementRedwan ADEN ALI100% (1)
- AnalyseMultivarieeDonneesGeographiques PDFDocument144 pagesAnalyseMultivarieeDonneesGeographiques PDFDouaa ImpératricePas encore d'évaluation
- Cite Radieuse Diane Sarah Moussaoui Rayane Laissani Randa Grp7Document26 pagesCite Radieuse Diane Sarah Moussaoui Rayane Laissani Randa Grp7Diane Sarah100% (1)
- Charte Tourisme DurableDocument4 pagesCharte Tourisme DurableMed SaksikPas encore d'évaluation
- CM2 Fiches OutilsDocument236 pagesCM2 Fiches Outilstemimi raoudha100% (1)
- 03 Generalites Sur Les FonctionsDocument18 pages03 Generalites Sur Les FonctionsJunior Le Pyromane100% (1)
- Analyse Par CPGSM Des Essences Automobiles Et de Condensat Issus Du Pétrole Brut Algérien.Document120 pagesAnalyse Par CPGSM Des Essences Automobiles Et de Condensat Issus Du Pétrole Brut Algérien.ALIPas encore d'évaluation
- Découverte Mbot Doc Réponse v2Document2 pagesDécouverte Mbot Doc Réponse v2clemence.nzkPas encore d'évaluation
- Compte Rendu Stage 3e4Document22 pagesCompte Rendu Stage 3e4RANIA AGOUZALPas encore d'évaluation
- L'historique Des Banques Marocaines Et Du Secteur BancaireDocument6 pagesL'historique Des Banques Marocaines Et Du Secteur BancaireKarim El100% (1)
- Revision BacDocument9 pagesRevision BacAnis Dahnen0% (1)
- Documentation Excel Formation LogistiqueDocument52 pagesDocumentation Excel Formation Logistiquepeter wilderson josephPas encore d'évaluation
- La DensitéDocument5 pagesLa Densité213020 213020Pas encore d'évaluation
- 10 Espaces ConfinésDocument28 pages10 Espaces ConfinésNATAMAPas encore d'évaluation
- 02 - Physiologie BactérienneDocument44 pages02 - Physiologie Bactériennebouchakour meryem100% (1)
- Add ExamenDocument5 pagesAdd ExamenOuakrim YounesPas encore d'évaluation