Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5782)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Determination of The Electron Specific MassDocument2 pagesDetermination of The Electron Specific MassAdina BlazePas encore d'évaluation
- CE-429149 Protection Cubicle F71 RevBDocument74 pagesCE-429149 Protection Cubicle F71 RevBMuhammad NasirPas encore d'évaluation
- Three Phase Induction Motor PDFDocument75 pagesThree Phase Induction Motor PDFAmitava BiswasPas encore d'évaluation
- Btee701 PPT-4Document15 pagesBtee701 PPT-4hbsjdbwPas encore d'évaluation
- V1 T4 Metering Products Ca08100002eDocument142 pagesV1 T4 Metering Products Ca08100002eomarlgonzPas encore d'évaluation
- CsirkekeltetőDocument2 pagesCsirkekeltetőklauszpeterPas encore d'évaluation
- Extremely Inverse Time Overcurrent CDG14 PDFDocument6 pagesExtremely Inverse Time Overcurrent CDG14 PDFkarqu86Pas encore d'évaluation
- NEMA MG-1 (Part 12-18)Document119 pagesNEMA MG-1 (Part 12-18)Majho Canilang0% (1)
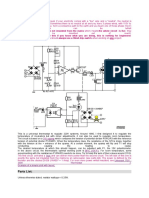
- Long-Range FM Transmitter With Variable Power OutputDocument2 pagesLong-Range FM Transmitter With Variable Power OutputHaspreet SinghPas encore d'évaluation
- Device Numbers and Their NomenclatureDocument1 pageDevice Numbers and Their Nomenclaturemani0723Pas encore d'évaluation
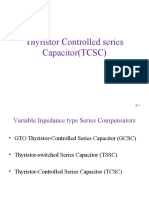
- TCSCDocument21 pagesTCSCAniruddha RayPas encore d'évaluation
- Exp 08 Analog DiscoveryOrM2kDocument24 pagesExp 08 Analog DiscoveryOrM2kMuhammed UmarPas encore d'évaluation
- HS-510 Vibration Trip Module: Key FeaturesDocument1 pageHS-510 Vibration Trip Module: Key Featuresjjtrivedi8717Pas encore d'évaluation
- Crane Control Panel DiagramsDocument24 pagesCrane Control Panel DiagramskabirmkjgfjPas encore d'évaluation
- 3512B PDFDocument2 pages3512B PDFSolomonPas encore d'évaluation
- Mil HDBK 217FDocument80 pagesMil HDBK 217FSivapriya SamyPas encore d'évaluation
- 300 Series 400 Amp Service Entrance Sub PackageDocument67 pages300 Series 400 Amp Service Entrance Sub Packagenitroxx7Pas encore d'évaluation
- Power System Switchgear and Protection (EET-301) : Reference Books AuthorsDocument20 pagesPower System Switchgear and Protection (EET-301) : Reference Books AuthorsAnuja TiparePas encore d'évaluation
- EE 4043 Electrical Machines and Drives IV: EctureDocument34 pagesEE 4043 Electrical Machines and Drives IV: EctureLasantha AbeykoonPas encore d'évaluation
- Semikron Manual de Aplicaciones PDFDocument464 pagesSemikron Manual de Aplicaciones PDFhsrairPas encore d'évaluation
- Clipsal RCD Tester 486D PDFDocument4 pagesClipsal RCD Tester 486D PDF322399mk7086Pas encore d'évaluation
- Makes ListDocument2 pagesMakes ListNagi ReddyPas encore d'évaluation
- 7400 eGPU MKII Illustrated Parts ListDocument13 pages7400 eGPU MKII Illustrated Parts ListJulio BaldoyPas encore d'évaluation
- Indra: Cabinet NameDocument1 pageIndra: Cabinet NameBoualem AisPas encore d'évaluation
- Quick Installation Guide For eNodeB Cabinets (V100R005C00 - 02) (PDF) - EN PDFDocument13 pagesQuick Installation Guide For eNodeB Cabinets (V100R005C00 - 02) (PDF) - EN PDFK OuertaniPas encore d'évaluation
- Symmetra PX UPS: Electrical Installation ManualDocument30 pagesSymmetra PX UPS: Electrical Installation ManualestorbakPas encore d'évaluation
- System Pro M Compact: and Other Modular Devices For Low Voltage InstallationDocument513 pagesSystem Pro M Compact: and Other Modular Devices For Low Voltage Installationmercury7k29750Pas encore d'évaluation
- Bus Bar ProtectionDocument8 pagesBus Bar ProtectionSiva Koti ReddyPas encore d'évaluation
- 4 Prong Universal Heat InstallationDocument1 page4 Prong Universal Heat InstallationdrsurferPas encore d'évaluation
- Sace LN Pag 42Document122 pagesSace LN Pag 42nelsonqPas encore d'évaluation