Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- SSC Physics List of Practical and QuestionsDocument2 pagesSSC Physics List of Practical and Questionsafzal0026Pas encore d'évaluation
- HP 450 OptocouplerDocument16 pagesHP 450 Optocoupler1cvbnmPas encore d'évaluation
- Kleinschmidt AN/FGC-25 Teletypewriter SetDocument17 pagesKleinschmidt AN/FGC-25 Teletypewriter SetRandom73100% (1)
- Annual Lesson Plan Sci f3Document5 pagesAnnual Lesson Plan Sci f3Rozlinda RamlanPas encore d'évaluation
- Physics ResistancesDocument4 pagesPhysics ResistancesThea Ü De GuzmanPas encore d'évaluation
- BS Labortary Course PH-193 by Usman - Lab Sheet-2Document24 pagesBS Labortary Course PH-193 by Usman - Lab Sheet-2Muhammad Usman MalikPas encore d'évaluation
- Problems 2Document2 pagesProblems 2ThomasAdiPas encore d'évaluation
- PS Half Mark questionsEM PDFDocument29 pagesPS Half Mark questionsEM PDFNutakki SreeramanaPas encore d'évaluation
- Resonant Inverter OrCADDocument13 pagesResonant Inverter OrCADCh ChristianPas encore d'évaluation
- Design Simulation and Hardware Implementation of Soft Switching Based Induction Heating System PDFDocument7 pagesDesign Simulation and Hardware Implementation of Soft Switching Based Induction Heating System PDFNjabulo XoloPas encore d'évaluation
- Anskey S2022 Booster PhysciDocument10 pagesAnskey S2022 Booster PhysciRavian Mhe BitonPas encore d'évaluation
- Bcs Written SyllabusDocument12 pagesBcs Written SyllabushamimisratPas encore d'évaluation
- Worksheet X PhysicsDocument31 pagesWorksheet X PhysicsGuru PrasannaPas encore d'évaluation
- Electives 2 Part 3Document155 pagesElectives 2 Part 3Johnfer AquinoPas encore d'évaluation
- Tutorial de ElectricidadDocument78 pagesTutorial de ElectricidadfrederypsPas encore d'évaluation
- Class e Resonant InverterDocument6 pagesClass e Resonant InverterHitesh MehtaPas encore d'évaluation
- Emergency Solar Power For $950... by Jeff YagoDocument5 pagesEmergency Solar Power For $950... by Jeff YagoEduardo J Villalobos GPas encore d'évaluation
- Basic-Engineering - Electrical EngineeringDocument227 pagesBasic-Engineering - Electrical EngineeringE-m FunaPas encore d'évaluation
- Internal Attachment Technical Report 2021-1Document22 pagesInternal Attachment Technical Report 2021-1Josline Muriiki100% (1)
- Series and Parallel CircuitsDocument5 pagesSeries and Parallel CircuitsPeaceman Shal0% (1)
- E 2Document224 pagesE 2Fayaz WaganPas encore d'évaluation
- Pass 5Document6 pagesPass 5Joel JusayPas encore d'évaluation
- Power Relay FTR-J2 Series: Ultra Small High Voltage DC RelayDocument10 pagesPower Relay FTR-J2 Series: Ultra Small High Voltage DC RelayHitesh PanigrahiPas encore d'évaluation
- Electrical DataDocument43 pagesElectrical DataSidra QasimPas encore d'évaluation
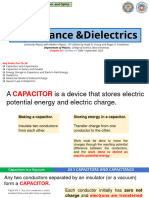
- Physics 133 - CH 24 - Capacitance and Dielectrics - by HRJDocument31 pagesPhysics 133 - CH 24 - Capacitance and Dielectrics - by HRJJP AmarantoPas encore d'évaluation
- Ohm's Law & Kirchhoff's LawsDocument22 pagesOhm's Law & Kirchhoff's LawsDr-Gurpreet KumarPas encore d'évaluation
- Report On Comparison of Series and Shunt CompensationDocument31 pagesReport On Comparison of Series and Shunt CompensationRam Uday Mandal67% (3)
- GSM Commander ManualDocument45 pagesGSM Commander Manualimtiaz1113Pas encore d'évaluation
- 1992 ST-375-92-EDD Chevrolet CK Wiring ManualDocument298 pages1992 ST-375-92-EDD Chevrolet CK Wiring ManualNestor Amezcua100% (1)