Vous aimerez peut-être aussi
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- B-Trees and B+-Trees: Jay Yim CS 157B Dr. LeeDocument34 pagesB-Trees and B+-Trees: Jay Yim CS 157B Dr. LeemaskplyPas encore d'évaluation
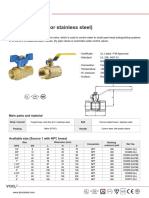
- VC02 Brass Ball Valve Full Port Full BoreDocument2 pagesVC02 Brass Ball Valve Full Port Full Boremahadeva1Pas encore d'évaluation
- Boeing 757 Normal Checklist: Power Up & Preliminary PreflightDocument4 pagesBoeing 757 Normal Checklist: Power Up & Preliminary PreflightАлексей ЯрлыковPas encore d'évaluation
- Corea 2016 Cost HandbookDocument70 pagesCorea 2016 Cost HandbookEdutamPas encore d'évaluation
- CC 1352 PDocument61 pagesCC 1352 PGiampaolo CiardielloPas encore d'évaluation
- Tenma 72-410a Digital MultimeterDocument22 pagesTenma 72-410a Digital MultimeterRiadh Ben SmidaPas encore d'évaluation
- MultimediaDocument4 pagesMultimediaMonica IsipPas encore d'évaluation
- QP Cluster Manager PDFDocument31 pagesQP Cluster Manager PDFkanisha2014Pas encore d'évaluation
- Spiral Welded Tubes BrochuresDocument4 pagesSpiral Welded Tubes BrochuresSoumitra GuptaPas encore d'évaluation
- Neurophone Ebook EnglDocument19 pagesNeurophone Ebook EnglViolin_teacher100% (3)
- 4 Power TransmissionDocument27 pages4 Power TransmissionMehmetPas encore d'évaluation
- Bank of AmericaDocument3 pagesBank of AmericamortensenkPas encore d'évaluation
- Ieeeee13caf2 935f 20150515073915Document9 pagesIeeeee13caf2 935f 20150515073915Jennifer YoungPas encore d'évaluation
- Anthropometric MeasurementsDocument7 pagesAnthropometric MeasurementsMurti Putri UtamiPas encore d'évaluation
- Auto Chassis NotesDocument90 pagesAuto Chassis Notesanishsukumar000gmailcomPas encore d'évaluation
- 49 CFR 195Document3 pages49 CFR 195danigna77Pas encore d'évaluation
- CV Europass 20160805 Kolla EN PDFDocument2 pagesCV Europass 20160805 Kolla EN PDFKeshav KollaPas encore d'évaluation
- Phase IIIDocument11 pagesPhase IIIAjun FranklinPas encore d'évaluation
- GS-1930 GS-1530 Service Manual: Technical PublicationsDocument137 pagesGS-1930 GS-1530 Service Manual: Technical PublicationshabibullaPas encore d'évaluation
- Performance Considerations Before Upgrading To Oracle 19c DatabaseDocument48 pagesPerformance Considerations Before Upgrading To Oracle 19c DatabaseJFLPas encore d'évaluation
- Sloba Dragovic - ResumeDocument3 pagesSloba Dragovic - ResumeSloba DragovicPas encore d'évaluation
- Project 1 - Nimisha AgrawalDocument13 pagesProject 1 - Nimisha AgrawalNimisha AgrawalPas encore d'évaluation
- Laporan Beton 1Document80 pagesLaporan Beton 1Seulgi BearPas encore d'évaluation
- VM 6083 - 60B1 Data SheetDocument3 pagesVM 6083 - 60B1 Data SheetMinh HoàngPas encore d'évaluation
- Training Report at TATA MotorsDocument28 pagesTraining Report at TATA MotorsAkarsh60% (5)
- O I - LT3 - HP3 - User - 02Document14 pagesO I - LT3 - HP3 - User - 02Francisco AvilaPas encore d'évaluation
- Papa Jew SkiDocument33 pagesPapa Jew Skiazimr157Pas encore d'évaluation
- Pinhole Camera InformationDocument4 pagesPinhole Camera InformationD'ferti AnggraeniPas encore d'évaluation
- Volvo Ec35D: Parts CatalogDocument461 pagesVolvo Ec35D: Parts Cataloggiselle100% (1)
- ANCAP Corporate Design GuidelinesDocument20 pagesANCAP Corporate Design GuidelineshazopmanPas encore d'évaluation