Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Sony MZ-R55 Service ManualDocument48 pagesSony MZ-R55 Service Manualxlam99100% (1)
- SEIKO - 5J22 Kinetic Auto-Relay Watch ManualDocument16 pagesSEIKO - 5J22 Kinetic Auto-Relay Watch Manualxlam99Pas encore d'évaluation
- Tektronix TDS210 Programmer ManualDocument256 pagesTektronix TDS210 Programmer Manualxlam99Pas encore d'évaluation
- Samsung GT-S5750E S5753E Wave575 Service ManualDocument92 pagesSamsung GT-S5750E S5753E Wave575 Service Manualxlam99100% (1)
- Panasonic KX-TG3612 DECT Phone ManualDocument32 pagesPanasonic KX-TG3612 DECT Phone Manualxlam99Pas encore d'évaluation
- LG LCDTV 32lh20fd Service ManualDocument28 pagesLG LCDTV 32lh20fd Service Manualxlam99Pas encore d'évaluation
- Bosch Gmr1 ManualDocument83 pagesBosch Gmr1 Manualxlam99Pas encore d'évaluation
- Fluke 177 Calibration InfoDocument22 pagesFluke 177 Calibration Infojp79dsfrPas encore d'évaluation
- Fluke 179 Supplement Users ManualDocument4 pagesFluke 179 Supplement Users Manualxlam99Pas encore d'évaluation
- MAX3421E USB Host ControllerDocument32 pagesMAX3421E USB Host Controllerxlam99Pas encore d'évaluation
- Fluke 175 ManualDocument18 pagesFluke 175 ManualZach PraxPas encore d'évaluation
- Pololu Micro Serial Controller Ssc03a - GuideDocument8 pagesPololu Micro Serial Controller Ssc03a - Guidexlam99Pas encore d'évaluation
- N Mosfet Fdv303nDocument4 pagesN Mosfet Fdv303nxlam99Pas encore d'évaluation
- PointGrey Datasheet Flea3 USB3Document2 pagesPointGrey Datasheet Flea3 USB3xlam99Pas encore d'évaluation
- LevelOne Portable Wireless Router WBR-6802 - UM - V1.0Document40 pagesLevelOne Portable Wireless Router WBR-6802 - UM - V1.0xlam99Pas encore d'évaluation
- Beginning Micro Controllers MSP430 - V0.3 - Gustavo LitovskyDocument92 pagesBeginning Micro Controllers MSP430 - V0.3 - Gustavo LitovskyDiego VelascoPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Tsividis - Putting The Lab TogetherDocument24 pagesTsividis - Putting The Lab TogetheryeiaPas encore d'évaluation
- TechRef RectifierDocument30 pagesTechRef RectifierDavid ParraPas encore d'évaluation
- An-6076 On Semi Design and Application Guide of Bootstrap Circuit For High Voltage Gate Drive ICDocument15 pagesAn-6076 On Semi Design and Application Guide of Bootstrap Circuit For High Voltage Gate Drive ICalstafilovPas encore d'évaluation
- Chapter 7 (Halogen Leak Testing)Document9 pagesChapter 7 (Halogen Leak Testing)Samia IbrahimPas encore d'évaluation
- Shadow Effects ON A Series-Parallel Array OF Solar Cells: 2, GoddardDocument25 pagesShadow Effects ON A Series-Parallel Array OF Solar Cells: 2, GoddardHeru SatriaPas encore d'évaluation
- Line Follower ReportDocument23 pagesLine Follower Reportatul mishra88% (8)
- Nixie Clock IN14 Instruction Manual Rev 2 V42Document34 pagesNixie Clock IN14 Instruction Manual Rev 2 V42ioan biscaPas encore d'évaluation
- Led - Ir - Tsal5300Document6 pagesLed - Ir - Tsal5300Ludwig SchmidtPas encore d'évaluation
- JNTUA-B.Tech.2-2 MECH-R15-SYLLABUSDocument19 pagesJNTUA-B.Tech.2-2 MECH-R15-SYLLABUSJayadeep ReddyPas encore d'évaluation
- Solar Cell Parameters Extraction Based On Single and Double-Diode Models: A ReviewDocument17 pagesSolar Cell Parameters Extraction Based On Single and Double-Diode Models: A ReviewSihem MansouriPas encore d'évaluation
- ESC201 UDas Lec14 Diodes - 2Document5 pagesESC201 UDas Lec14 Diodes - 2Pk KumarPas encore d'évaluation
- Chapter 2 Basic Physics of SemiconductorsDocument42 pagesChapter 2 Basic Physics of SemiconductorsKyusang ParkPas encore d'évaluation
- Mur3020 3040 3060 PDFDocument9 pagesMur3020 3040 3060 PDFChristina AngelesPas encore d'évaluation
- BHDDocument88 pagesBHDajesh4141Pas encore d'évaluation
- Bece201l Electronic-Materials-And-Devices TH 1.0 0 Bece201lDocument3 pagesBece201l Electronic-Materials-And-Devices TH 1.0 0 Bece201lkambojnaman2005Pas encore d'évaluation
- General Description Product Summary: 30V N-Channel MOSFETDocument6 pagesGeneral Description Product Summary: 30V N-Channel MOSFETShamim DhaliPas encore d'évaluation
- 19 Modeling PDFDocument12 pages19 Modeling PDFAnonymous PzbYdcEzPas encore d'évaluation
- 68V N-Channel MOSFET: Absolute Maximum RatingsDocument5 pages68V N-Channel MOSFET: Absolute Maximum Ratingsvali dPas encore d'évaluation
- EC T34 Electronic Devices and CircuitsDocument142 pagesEC T34 Electronic Devices and CircuitsRajesh VJPas encore d'évaluation
- Electrical Overstress of Integrated CircuitsDocument8 pagesElectrical Overstress of Integrated CircuitsJarira DanghirunPas encore d'évaluation
- SMD Type Mosfet: Dual P-Channel MOSFET AO4813Document5 pagesSMD Type Mosfet: Dual P-Channel MOSFET AO4813Will AlcântaraPas encore d'évaluation
- Datasheet 03N6055Document14 pagesDatasheet 03N6055Jorge ChapiPas encore d'évaluation
- Troubleshooting and Service Information For Voltmaster GeneratorsDocument15 pagesTroubleshooting and Service Information For Voltmaster GeneratorsMd Rodi Bidin100% (1)
- DMD Scrolling Notice Board DisplayDocument18 pagesDMD Scrolling Notice Board DisplayDebashishParidaPas encore d'évaluation
- Programme: Electronics and Telecommunication Engineering: Government College of Engineering, KaradDocument49 pagesProgramme: Electronics and Telecommunication Engineering: Government College of Engineering, KaradPratik TelangPas encore d'évaluation
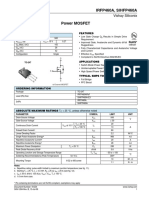
- Vishay IRFP460APBF Datasheet PDFDocument8 pagesVishay IRFP460APBF Datasheet PDFkamel keddarPas encore d'évaluation
- Stps2045 CT CF CGDocument7 pagesStps2045 CT CF CGCah NgaloefPas encore d'évaluation
- Laboratory Manual: Tester Lps04: DC Characteristics of Fiber Optic Leds, Pin Photodiode and PhototransistorDocument17 pagesLaboratory Manual: Tester Lps04: DC Characteristics of Fiber Optic Leds, Pin Photodiode and Phototransistorramakris79Pas encore d'évaluation
- ESC TerminologyDocument7 pagesESC Terminologyapi-26045568Pas encore d'évaluation
- Chapter - 29 Semiconductor Electronics Materials Devices and Simple CircuitsDocument36 pagesChapter - 29 Semiconductor Electronics Materials Devices and Simple CircuitsTilahun ArfichoPas encore d'évaluation