Académique Documents
Professionnel Documents
Culture Documents
Artigomotor E-Torq
Transféré par
João Carlos AraujoTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Artigomotor E-Torq
Transféré par
João Carlos AraujoDroits d'auteur :
Formats disponibles
Programa de Ps-graduao em Engenharia Eltrica Universidade Federal de Minas Gerais
Eduardo de Melo Rezende e Sampaio Xavier
Engenheiro Eletricista - UFMG
INSTRUMENTAO, MEDIO E MODELAGEM DE PARMENTROS DINMICOS DE UM SISTEMA CONTROLE MOTOR
Orientador: Prof. Dr. Luis Aguirre
Belo Horizonte, Maro de 2011.
Dedicatria
iii
Agradecimentos
Resumo
vii
Abstract
ix
Sumrio
Lista de Figuras Lista de Tabelas 1 Introduo 1.1 1.2 2 Motivao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xiv xv 1 1 3 5 5 6 10 13 16 17 19 23 23 24 25 27
Reviso Bibliogrca 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 Uma breve histria do motor ciclo otto . . . . . . . . . . . . . Sistema de gerenciamento do motor, EMS . . . . . . . . . . . Modelo Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . Ecincia Volumtrica . . . . . . . . . . . . . . . . . . . . . . Razo Ar-Combustvel, A/F . . . . . . . . . . . . . . . . . . . Torque Efetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . Temperatura do Catalisador . . . . . . . . . . . . . . . . . . . Redes neurais de funes de base radial regularizada . . . . 2.8.1 2.8.2 2.8.3 2.9 Introduo . . . . . . . . . . . . . . . . . . . . . . . . . Denio do modelo . . . . . . . . . . . . . . . . . . . Estimao dos parmetros . . . . . . . . . . . . . . . .
Representaes No-Lineares . . . . . . . . . . . . . . . . . . xi
xii 2.9.1 2.9.2 2.9.3 2.9.4 3 Introduo . . . . . . . . . . . . . . . . . . . . . . . . . Modelos de Hammerstein . . . . . . . . . . . . . . . . Modelos NARMAX usando funes radiais de base . Regresso por mnimo quadrados estendidos . . . . . 27 28 30 33 37 37 38 40 41 43 46 47 53 53 57 67
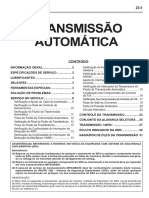
Experimento 3.1 Motor E.torq . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1.1 3.2 Sistema de gerenciamento do motor . . . . . . . . . .
Dinammetro para ensaio de motores . . . . . . . . . . . . . 3.2.1 3.2.2 3.2.3 Medidor de combustvel . . . . . . . . . . . . . . . . . Medidor de uxo de ar . . . . . . . . . . . . . . . . . . Analisador de A / F . . . . . . . . . . . . . . . . . . . .
3.3 3.4
Experimento Esttico . . . . . . . . . . . . . . . . . . . . . . . Experimento Dinmico . . . . . . . . . . . . . . . . . . . . . . 3.4.1 3.4.2 ISAC, Inertia Simulation And Control . . . . . . . . . . Denio do experimento . . . . . . . . . . . . . . . .
Referncias Bibliogrcas . . . . . . . . . . . . . . . . . . . . . . .
Lista de Figuras
1.1 1.2 1.3 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 2.10 2.11 2.12 2.13 2.14 2.15 3.1 3.2 3.3 3.4 3.5
Reduo dos limites de emisso de poluentes de acordo com as fases do Proconve (Cetesb, 2011). . . . . . . . . . . . . . . Esquema de um motor de combusto interna com VVT . . . Esquema processo de calibrao . . . . . . . . . . . . . . . . Nikolaus Otto . . . . . . . . . . . . . . . . . . . . . . . . . . . Adoo do sistema controle motor pela industria (Givens, 1976) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Sistema analgico Bosch LE-Jetronic . . . . . . . . . . . . . . Diagrama do sistema controle motor (Sunz et al., 2005) . . . Diagrama de blocos de um modelo motor (Sunz et al., 2005) Ilustrao de um modelo black box . . . . . . . . . . . . . . . Sistema de aspirao de um motor (Qadeer and Aamer, 2010) Esquema clula de carga . . . . . . . . . . . . . . . . . . . . . Esquema de um catalisador trivalente . . . . . . . . . . . . . Ecincia de converso do CO e HC versus temperatura do catalisador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Mecanismos de desativao . . . . . . . . . . . . . . . . . . . Exemplo de um RBFNN padro . . . . . . . . . . . . . . . . . Exemplo de um RBFNN regularizada . . . . . . . . . . . . . Modelo geral Hammerstein . . . . . . . . . . . . . . . . . . . Expanso RBF . . . . . . . . . . . . . . . . . . . . . . . . . . . E.torQ 1.6 16V . . . . . . . . . . . . . . . . . . . . . . . . Ilustrao do software INCA da empresa ETAS . . . . . Ilustrao tpica de uma dinammetro . . . . . . . . . . Sees padro de medio . . . . . . . . . . . . . . . . . Analisador de A / F - MEXA 700 da empresa Horiba xiii . . . . . . . . . .
2 3 4 5 7 8 9 11 12 13 19 20 21 22 27 28 29 32
. 37 . 40 . 42 . 44 . 46
xiv 3.6 3.7 3.8 3.9 3.10 3.11 3.12 3.13 3.14 3.15 3.16 3.17 Experimento esttico 1 . . . . . . . . . . . . . . . . . . . . . Experimento esttico 2 . . . . . . . . . . . . . . . . . . . . . Experimento esttico 3 . . . . . . . . . . . . . . . . . . . . . Correo da atenuao de medida do uxo de ar . . . . . . Medies das vazo de ar . . . . . . . . . . . . . . . . . . . Carga rodoviria em uma estrada plena . . . . . . . . . . . Gradiente de resistncia . . . . . . . . . . . . . . . . . . . . Componentes com momentos de inrcia . . . . . . . . . . . Denio de troca de marcha . . . . . . . . . . . . . . . . . Ciclo FPT 75 . . . . . . . . . . . . . . . . . . . . . . . . . . . Ciclo FPT 72 Hot . . . . . . . . . . . . . . . . . . . . . . . . Funo de autocovarincia da velocidade e da rotao do motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.18 Dados para identicao dos parmetros e para validao 3.19 Funes de autocovarincia linear e no linear dos sinais de sada para amostragem de 1Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 50 50 52 53 54 55 55 56 57 58
. 59 . 60 . 62
Lista de Tabelas
2.1 3.1 3.2 3.3 3.4 3.5 3.6 3.7
Valores razo ar-combustvel estequiomtrica por tipo de combustvel . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ficha tcnica E.torQ 1.6 16V . . . . . . . . . . . . . . . . . . . Lista de sensores utilizados do E.torQ 1.6 16V . . . . . . . . . Especicao do sensor Bosch de presso absoluta (Cirilo et al., 2009) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Dados tcnicos da balana AVL 733S . . . . . . . . . . . . . . Especicao tcnica . . . . . . . . . . . . . . . . . . . . . . . Especicao tcnica do analisador de A/F (horiba, 2011) . . Lista de variveis medidas. . . . . . . . . . . . . . . . . . . .
17 38 39 39 43 44 47 51
xv
Lista de Abreviaes
CONAMA DBW EMS UCE EGR FPT MAP MCI MBC MBT RBF RBFNN NARX NARMAX MLP A/F PROCONVE SAE
Conselho Nacional de meio Ambiente; Drive By Wire (Sistema eletrnico de acionamento da borboleta de acelerao); Engine Management Systems (Sistema de gerenciamento do motor); Unidade de Controle Eletrnico; Recirculao do Gas de Exausto; Fiat Powertrain Technologies; Manifold Absolute Pressure (Presso absoluta no coletor de admisso); Motor de Combusto Interna; Model based Controller (Controle baseado em modelo); Mean Best Torque (Mdia do mximo torque); Radial Basis Function (Funo de Base Radial); Radial Basis Function Neural Networks (Redes Neurais de Funo de Base Radial ); Modelo Mo-Linear Auto-Regressivo com Entradas Exgenas Modelo No-Linear Auto-Regressivo de Mdia Mvel com entradas exgenas Multi Layer Perceptron (multi-camada perceptrons); Razo Ar/Combustvel ; Programa de Controle da Poluio do ar por Veculos Automotores; Society of Automotive Engineers (Sociedade de engenharia automotiva); xvii
xviii TWC ECU VCT ISAC FPT Three-way catalysis (Catalisador de trs estgios); Engine Control Unit (Unidade de Controle Motor); Variable Camshaft Timing (Comando de vlvulas varivel); Inertia Simulation And Control (Simulao e Controle Inercial); Federal Test Procedure (Procedimento de teste federal);
Captulo 1
Introduo
1.1
Motivao
Durante a ltima dcada, rigorosas regulamentaes governamentais, que restringem o consumo de combustvel e as emisses de gases de escape, tm exigido uma forte mudana no sistema eletrnico controle motor (Rask and Sellnau, 2004). No Brasil, o controle governamental das emisses de gases nocivos veiculares iniciou-se com a criao do Conselho Nacional do Meio Ambiente - Conama, em 1986. Foi estabelecido um cronograma de reduo gradual da emisso de poluentes para veculos leves (automveis) e para veculos pesados (nibus e caminhes) pelo Programa de Controle da Poluio do Ar para Veculos Automotores - Proconve. A primeira fase implantada para os veculos leves (L-1), em 1988, foi caracterizada pela eliminao dos modelos mais poluentes e aprimoramento da produo. Na segunda fase (L-2), em 1992, foram necessrios o desenvolvimento e a introduo de novas tecnologias, em especial a injeo eletrnica de combustvel e os conversores catalticos. Nesta fase, foi intensicado o desao tecnolgico, principalmente para permitir a adequao de catalisadores e sistemas de injeo eletrnica para uso com mistura de ethanol, em proporo nica no mundo. Na terceira fase (L-3), que teve incio em 1997, a indstria adicionou aos tens da segunda fase o sensor de oxignio. Em 2003 e em 2008, tiveram incio a quarta (L-4) e quinta fases (L-5), respectivamente. A proxima fase iniciar em 2014. A Figura 1 ilustra a reduo dos limites de emisses com a evoluo das fases do Proconve (Cetesb, 2011). As normas legislativas, a crescente exigncia dos cliente e a eterna busca por motores mais ecientes impulsionam a indstria automobilstica a bus-
1 Introduo
Figura 1.1: Reduo dos limites de emisso de poluentes de acordo com as fases do Proconve (Cetesb, 2011).
carem novas tecnologias (Qadeer and Aamer, 2010). Como por exemplo: catalisadores com alta ecincia na converso dos gazes txicos, otimizao da geometria da cmara de combusto, bicos multi-furos, o aumento da presso, Variable Valve timing (VVT) e Variable Valve Actuation (VVA). Estas tecnologias representam o aumento do grau de liberdade do sistema controle motor, tornando-o cada vez mais complexo. Figura 1.2. Por outro lado, o alto ndice de competitividade no ramo automobilstico estimulam as empresas a promoverem um aumento do portfolio de produtos e uma agressiva reduo do time to market, isto , desenvolver uma grande variedade de produtos com qualidade em perodos cada vez menores (Nascimento and Segre, 2006). Contudo, o aumento da complexidade dos sistemas e a necessidade de desenvolver produtos em perodos cada vez mais curtos, pressionam as montadoras a aumentarem o uso de ferramentas virtuais para o desenvolvimento dos projetos (De Nicolao et al., 1996). Simulaes, modelos e otimizaes so palavras cada vez mais comum no mundo automobilstico.
1.2 Objetivo
Figura 1.2: Esquema de um motor de combusto interna com VVT .
1.2
Objetivo
O objetivo do presente trabalho realizar a instrumentao e estimao de variveis dinmicas importante para o controle do motor de combusto. So elas: a ecincia volumtrica, torque efetivo e a temperatura de catalisador. Os conceitos de cada parmetro sero descritos nos captulos seguintes. Para a instrumentao, sero realizados dois experimentos: um esttico e outro dinmico, ambos em um ambiente controlado: dinammetro motor ativo. No experimento esttico, os paramentos sero estimados usando tc-
1 Introduo
nicas de aproximao por funes base radial regularizadas (Neve et al., 2009). No experimento dinmico, o modelo ser aproximado por representaes no lineares (Aguirre, 2000). Posteriormente, o modelo motor validado ser til para calibrao de algoritmos da unidade de controle motor, ECU. Antecipando e reduzindo as fases de desenvolvimento da calibrao sistema controle motor por meio de um ambiente virtual.
Figura 1.3: Esquema processo de calibrao .
Captulo 2
Reviso Bibliogrca
2.1
Uma breve histria do motor ciclo otto
Figura 2.1: Nikolaus Otto [14 Jun 1832 - 26 Jan 1891] . O motor de combusto interna, MCI, comeou a ser concebido quando em 1862, o fsico francs Alphonse Beau de Rochas props as condies necessrias para que um motor de combusto interna, a quatro tempos, funcionasse com um mximo de economia. Rochas chegou a descrever tambm, a sequncia de eventos, por meio do qual a economia e a ecincia poderiam ser conseguidas. Essa sequncia, que totalizava 4 tempos , em sntese, o que hoje ocorre basicamente em todo motor de combusto interna. Porm, Rochas no chegou a construir motor algum, tendo apenas formulado as condies de funcionamento econmico que ele havia imaginado. O motor apenas construdo experimentalmente em 1872, s
2 Reviso Bibliogrca
foi realizado praticamente em 1876 por Nikolaus Otto, gura 2.1, que foi, inclusive, quem determinou o ciclo terico sob o qual trabalha o motor. Quando a rma alem Otto und Langen passou a fabricar os motores 4 tempos, de pistes mveis, ligados a um virabrequim, este tipo de motor passou a se chamar popularmente de motor Otto (Passarini, 1993).
2.2
Sistema de gerenciamento do motor, EMS
O desenvolvimento dos primeiros sistemas mecnicos de injeo de combustvel para motores de ciclo Otto comearam a partir de 1950. Conforme (Givens, 1976), em 1954, a Mercedes-Benz lanou seu modelo esportivo, o 300SL, com um sistema de injeo direta da Bosch, o qual injetava diretamente na cmara de combusto, semelhante aos motores Diesel. Em 1957 a injeo direta foi convertida para a indireta. De acordo com (Givens, 1976), a Cadillac, em 1973, iniciou um programa para a implementao de sistemas de injeo eletrnica em seus veculos. O sistema, que passou a ser instalado como equipamento de srie nos modelos Seville e como opcional em outros modelos, era da Bendix desenvolvido em parceria com a Bosch. Esse sistema era uma verso mais sosticada daquele apresentado em 1957. Nesta verso, o sinal para ativar as vlvulas injetoras, era enviado diretamente pela Unidade de Controle Eletrnico. A ECU, que era um computador analgico pr programado, recebia os sinais dos sensores gerando um pulso com durao adequada para ativar os bicos injetores. No mesmo ano, a Bosch introduziu o KJetronic, um sistema com controle mecnico-hidrulico, com medio do volume de ar e que injetava o combustvel continuamente nas vlvulas de admisso. O L-Jetronic, da mesma poca, era um sistema com controle eletrnico e injeo de combustvel intermitente. Em 1988, o controle eletrnico foi empregado nos veculos de srie no Brasil pela Volkswagen, equipando um de seus modelos esportivos com um sistema analgico (Bosch LE-Jetronic, gura 2.3). No ano seguinte, a GM tambm passou a equipar um de seus modelos com a injeo eletrnica. No ano de 1991 todas as montadoras nacionais estavam empregando tal tecnologia. O avano no emprego da injeo eletrnica no Brasil, ocorreu em um momento de crescimento da produo de modelos a gasolina. Entretanto, os motores a etanol exigiam sistemas especiais de injeo, no
2.2 Sistema de gerenciamento do motor, EMS
Figura 2.2: Adoo do sistema controle motor pela industria (Givens, 1976) .
disponveis no mercado internacional. No Brasil, a partir deste momento, houve um grande crescimento na aplicao da tecnologia de gerenciamento de motores a combusto interna. E em 1997, todos os carros produzidos no pais j possuam injeo eletrnica (Bartolomais, 1989). Com fortalecimento da tecnologia de gerenciamento de motores da industria automobilstica brasileira, em 2003, foram desenvolvidos veculos que funcionam com exibilidade no tipo de combustvel, que so conhecidos popularmente como "ex"no Brasil. O motor do veculo ex funciona com qualquer proporo na mistura de gasolina e lcool (etanol), armazenados no mesmo tanque. A injeo ajustada segundo a mistura, no caso da tecnologia brasileira, tal ajuste feito com software automotivo desenvolvido no pas, que no precisa de sensores adicionais que encarea o custo do veculo (Daniel, 2006).
2 Reviso Bibliogrca
Figura 2.3: Sistema analgico Bosch LE-Jetronic .
Atualmente, o moderno EMS envolvem muitas funes e utilizam vrios sensores e atuadores (Sunz et al., 2005). As duas principais funes so: 1) sistema de injeo de combustvel e 2) sistema de controle de ignio. O primeiro responsvel por controlar a quantidade ideal de combustvel para cada condio de operao do motor. O segundo responsvel pela aplicao do avano de ignio timo, isto , avano de mximo torque, MBT. Os demais subsistemas (gesto de torque, recirculao de gases e entre outros) atuam de maneira integrada, gerenciando seus funcionamentos, de modo que, operem de forma otimizada. Minimizando o consumo de combustvel, minimizando a emisso de poluentes (cumprindo a legislao), maximizando a performance, dirigibilidade e vida til (Bo-Chiuan et al., 2010). A gura 2.4 ilustra os principais elementos de um EMS tpico, incluindo sensores e atuadores. Os sensor incluem posio do virabrequim, posio das vlvulas de admisso, massa de ar de admisso, presso absoluta do coletor, sensores de oxignio dos gases de escape (tanto pr quanto pscatalisador) e temperatura de arrefecimento. Os atuadores convencionais incluem controle do acelerador, recirculao dos gases, controle de ignio e injeo de combustvel. Motores de tecnologia avanada pode incorporar controle das vlvulas (vlvulas de admisso, vlvulas de escape ou ambos), turbocompressor, controle de presso de combustvel, controle de desativao de cilindros e controle de turbulncia. Avanada tecnologia de
2.2 Sistema de gerenciamento do motor, EMS
Figura 2.4: Diagrama do sistema controle motor (Sunz et al., 2005) .
sensoriamento incluem a medies da presso no cilindro ou a ionizao para otimizar a combusto.
As funes de uma ECU so entregar ao motorista o torque exigido, monitorar o sistemas de controle de emisso a bordo, aquecer e resfriar o catalisador, purgar o vapor do combustvel no tanque, entre outras. A adoo de novos sensores e atuadores, devido as regulamentaes mais agressiva, elevam drasticamente a complexidade das funes de controle do motor. Para motores convencionais , trs tarefas de controle afetam diretamente as emisses, o desempenho e a economia de combustvel (Sunz et al., 2005):
10 Controle da relao Ar / Combustvel
2 Reviso Bibliogrca Fornecer a proporo correta de ar e combustvel para uma eciente combusto. Controle da centelha da vela de ignio, gerando torque mximo. Recirculao dos gases de escape, converso dos gases txicos e gesto da temperatura.
Controle de ignio
Dinmica dos gases de escape
Essas trs funes de controle tm aumentada signicativamente, tanto em termos de desempenho e complexidade, quanto na introduo de novos atuadores.
2.3
Modelo Motor
Em Sunz et al. (2005), modelos de motores referem-se representaes linear e no-linear de baixa freqncia fenomenolgica que capturam a dinmica do sistema. So necessrios para desenvolvimento do controle motor. O comportamento esttico, como por exemplo emisses e a ecincia volumtrica, podem ser obtido experimentalmente a partir de mapeamento em estado estacionrio em um dinammetro. A caracterizao de motores teve inicio nos primeiros anos da dcada de 70 por Hazell e Flower (Hazell and Flower, 1971b) e (Hazell and Flower, 1971a). Estes artigos mostram o pionerismo de Hazell e Flower em desenvolver modelo motor discreto com amostragem sincronizada ao evento do ngulo de manivela. Tal modelo tinha o objetivo de desenvolver aproximaes da quantidade de combustvel dependendo do torque em plena e parcial condio, comparar da performace de designer dos componentes e analisar a estabilidade do sistema (Cook and Powell, 1988). Um modelo motor linear, com uma aproximao do comportamento de emisses, foi desenvolvido por Cassidy (Cassidy et al., 1980) e foi utilizado para o projeto de controle linear quadrtico. Posteriormente, o controle quadrtico linear foi aplicado por Kamei (Kamei et al., 1987) para um modelo linear de 23a ordens. Resultados de testes em um dinammetro esttico e dinmico foram utilizados para estimar parmetros do modelo
2.3 Modelo Motor
11
usando o mtodo de identicao estatstica (Cook and Powell, 1988). Modelos de motores no-lineares foram desenvolvidos a partir nal do ano 1970, como relatado em muitos trabalhos, tais como, (Powell and Cook, 1987) e (Moskwa and Hedrick, 1992). O ciclo de quatro tempos, naturalmente divide o processo fsico em quatro eventos: admisso, compresso, gerao de energia e exausto. Modelos explorando a esta natureza intrinsecamente discreta so descritos, por exemplo, em (Cook and Powell, 1987), (Powell et al., 1987) e (Yurkovich and Simpson, 1997).
Figura 2.5: Diagrama de blocos de um modelo motor (Sunz et al., 2005) .
A gura 2.5 mostra o diagrama de bloco de um modelo motor fenomenolgico. A representao matemtica de um motor aspirado convencional inclui os seguintes elementos: 1- o corpo de borboleta, 2- coletor de admisso, 3gerao de torque, 4- dinmica rotacional do motor. O modelo tambm pode incluir o sistema recirculao do gas de exausto, EGR, temperatura de exausto de gases e dinmica, presso e emisses. Segundo De Nicolao et al. (1996), formulaes fsicas tm sido utilizadas na literatura para determinar os modelos adequados de efeitos quasi-estticos, ver, por exemplos Boam et al. (1989) e Matthews et al. (1991). Uma descrio completa, incluindo os fenmenos dinmicos, pode ser obtida pelo misto fsico e modelos caixa-preta, tambm chamado de modelos caixa-cinza, (Siviero et al., 1995). No entanto, tanto modelos fsicos quanto caixa-cinza exigem o conhecimento de alguns valores que no
12
2 Reviso Bibliogrca
esto geralmente disponveis em condies normais de funcionamento. Assim, um abordagem puramente caixa-preta freqentemente usada. Ver exemplos (Hendricks and Sorenson, 1990) e (Siviero et al., 1995).
Figura 2.6: Ilustrao de um modelo black box .
A modelagem caixa preta geralmente realizada por meio de uma abordagem paramtrica: uma dependncia paramtrica (por exemplo, do tipo polinomial) sob variveis de entrada assumida a priori e os coecientes desconhecidos so estimados utilizando mnimos quadrados ou tcnicas de mxima verossimilhana, (Beck and Arnold, 1977) e (Soderstrom and Stoica, 1989). No entanto, este mtodo envolve algumas escolhas crticas, como por exemplo, a seleo das variveis de entrada e da estrutura de dependncia funcional. A experincia tem mostrado que a determinao do melhor modelo de estrutura e ordem pode tornar-se muito demorado. Ento, importante considerar tambm tcnicas no paramtricas de estimao, como modelos aditivos (Hastie and Tibshirani, 1990), o que pode dar dicas adequada "no que depende do que", e dar orientaes para a seleo de parmetros e da estrutura do modelo. Alm disso, funo de base radiais (RBF) e multi-camada perceptrons (MLP) tambm podem ser usados para resolver problemas de identicao caixa-preta (De Nicolao et al., 1996).
2.4 Ecincia Volumtrica
13
2.4
Ecincia Volumtrica
Figura 2.7: Sistema de aspirao de um motor (Qadeer and Aamer, 2010) .
O sistema de admisso (tomada de ar, o ltro de ar, dutos de aspirao, resonadores, a vlvula de admisso) limita a quantidade de ar que um motor pode admitir. A ecincia volumtrica, v , utilizada como uma medida global da eccia de um motor de quatro tempos e seus sistemas de admisso e de escape. A ecincia volumtrica usado somente com motores de quatro tempos. denido como o uxo de ar que entra no sistema de admisso dividido pelo uxo de ar ideal gerado pelo pisto deslocado (Heywood, 1988). map mideal
v =
(2.1)
Onde map representa a massa de ar que ue para o cilindro e mideal representada como:
mideal = 0. 5. atm . Vd . N
(2.2)
Onde atm a densidade atmosfrica, Vd o volume deslocado pelo
14 pisto e N a velocidade do motor. Combinando a equao 2.1 com a equao 2.2. map 0,5. atm . Vd . N
2 Reviso Bibliogrca
v =
(2.3)
Ento, implementado o fator de correo descrito em Heywood (1988). map Ts 1 . ( )2 0,5. atm . Vd . N Tm
v =
(2.4)
Sendo Ts , a temperatura padro do coletor de admisso e Tm , a temperatura medida do coletor de admisso. Um modelo simples, mas bastante realista do uxo de ar no coletor de admisso o chamado modelo preenchimento e esvaziamento (De Nicolao et al., 1996). O uxo de ar que entra no coletor atravs do bombeado, acelerador para fora do coletor para dentro dos cilindros. A equao de conservao de massa aplicada ao coletor de admisso a seguinte:
ma = mat map
(2.5)
Sendo mat , a massa de ar que atravessa a borboleta e ma , a taxa de variao da massa de ar entre a borboleta de admisso e as portas de entrada do cilindro. Assumindo a presso do coletor uniforme, a temperatura no coletor de admisso constante e a lei do gs ideal, o termo ma pode ser escrito como (De Nicolao et al., 1996): pmam . V R. Tmam
ma =
(2.6)
Onde pmam a variao da presso no coletor de admisso, V o volume compreendido entre a corpo de borboleta e as vlvulas de admisso, R a constante dos gases perfeitos e Tmam a temperatura do coletor de admisso. Portanto:
2.4 Ecincia Volumtrica
15
map = mat
pmam . V R. Tmam
(2.7)
Combinando a equao 2.4 com a equao 2.7
pmam .V R.Tmam
v =
Ts 1 )2 0,5. atm . Vd . N Tm .(
mat
(2.8)
Segundo Heywood (1988), v afetada pelo combustvel, design, motor e pelas variveis de operao do motor: 1Tipo de combustvel, relao A / F, taxa de vaporizao do combustvel. Temperatura da mistura como inuenciado pela transferncia de calor. Razo entre presso de escape e da presso de admisso. Razo de compresso. Velocidade do motor. Designe do coletor de escape e do coletor de admisso. Geometria das vlvulas de admisso e escape, tamanho, perl, e tempo de abertura.
2-
34567-
Os efeitos dos pontos citado acima so essencialmente de natureza quase esttica. No entanto, muitas dessas variveis sofrem efeitos que dependem do uxo dinmico e onda de presso que acompanham a variao dos processos de trocas gasosas. Segundo Qadeer and Aamer (2010), v um dos processos mais importantes que rege o desempenho do motor. Ao receber a quantidade ideal de ar dentro do cilindro durante cada ciclo, calcula-se a quantidade de combustvel, e pelo processo de centelhamento da vela de ignio, h a
16
2 Reviso Bibliogrca
converso em potncia de sada. Na literatura, h diversas tentativas de modelar a v do motor. Um grande nmero de autores consideram a v constante, como por exemplo Butt and Bhatti (2008), ignorando assim a dinmica induzida por v ao manipular o ngulo de borboleta. Recentemente, Muller (Martin, 2009) tentou explicar v com uma funo das presso do coletor de admisso e de escape. O autor Jongeneel em Jongeneel et al. (2009), calcula a ecincia volumtrica ao medir a quantidade de abertura da vlvula. Moskwa (Moskwa and J.K., 1987) sugeriu uma equao matemtica de v para condies dinmicas e estveis dependendo da velocidade do motor, ar admitido e vrios outros parmetros do motor. Alguns pesquisadores, por exemplo De Nicolao et al. (1996), utilizaram paramtricas e no paramtricas tcnicas, black box , para medir a v atravs dos dados de sensores.
2.5
Razo Ar-Combustvel, A/F
Em testes sob motores de combusto interna, tanto a vazo mssica do ar, mar , quanto a vazo mssica do combustvel, m f , normalmente so medidos. A rao dessas taxas de uxo til na denio de condies de funcionamento do motor (Heywood, 1988). mar mf
A/F =
(2.9)
A faixa normal de operao para um motor de ignio comandada convencional, usando gasolina sem adio de lcool de 12 <= A/F <= 18, usando gasolina com 25% de lcool de 11 <= A/F <= 16 , usando somente lcool de 7,4 <= A/F <= 11 e com combustvel diesel, de 18 <= A/F <= 70 (Heywood, 1988). Um outro parmetro motor muito utilizado o . Representa uma forma normalizada do A/F por tipo de combustvel (De Nicolao et al., 1996): A/F s
(2.10)
2.6 Torque Efetivo
17
Onde s a razo ar-combustvel estequiomtrica para cada tipo de combustvel. Tabela 2.1: Valores razo ar-combustvel estequiomtrica por tipo de combustvel Tipo de Combustvel Gasolina sem adio de lcool Gasolina com 25% de lcool Etanol Gs natural Propano Metanol Hidrognio Diesel s 14,7 13,2 9 17,2 15,5 6,4 34 14,6
igual 1.0, signica que o A/F estequiomtrico. Mistura rica quando menor do que 1.0, e pobre quando maior que 1.0.
2.6
Torque Efetivo
A potncia indicada, Pi , por cilindro est relacionado com o trabalho indicado por ciclo (Heywood, 1988). Wc,i . N nR
Pi =
(2.11)
Onde Wc,i o trabalho entregue ao pisto durante os cursos de compresso e expanso, nR o nmero de revolues do pisto para cada ciclo de combusto (para motores de 4 tempos nR igual a 2) e N a velocidade de rotao do eixo virabrequim. A potncia efetiva a potncia indicada menos as perdas.
Pi = Pe + Pl
(2.12)
A potncia P efetiva o produto de torque efetivo com a velocidade
18 angular.
2 Reviso Bibliogrca
Pe = 2. . N. Te Portanto, Pe 2. . N
(2.13)
Te =
(2.14)
Em Cook and Powell (1988), o torque efetivo gerado a partir do processo de combusto. dependente da ignio, quantidade de ar que entra nos cilindros, combustvel injetado e residual gs nos cilindros, bem como outras variveis e parmetros que inuenciam a ecincia da combusto, tais como, a geometria da cabea do pisto. Tambm segundo Cook and Powell (1988), denir o torque do motor em termos mensurveis por meio de variveis independentes, resulta em uma relao quase-esttica em que a dinmica reete efeitos do atrito e os atrasos de respirao. A equao do torque fornece uma base para ns experimentais na determinao das variveis de entrada. Uma estimativa para a caracterizao do torque do motor obtida atravs do emprego tcnicas analticas de ajuste de curvas realizadas em um dinammetro motor, obtida dos dados experimentais como por exemplo, em Mencik and Blumberg (1978). Segundo Neve et al. (2009), o torque , em geral, uma funo das variveis controladas: avano de ignio , razo ar / combustvel relativa (), velocidade da rotao do motor (N) e presso no coletor de admisso (). Na literatura, o torque mdio indicado modelado como o produto de um torque ideal com o rendimento de avano e o rendimento de lambda, ver exemplo Hentz et al. (2001). Assim, o torque uma funo de quatro variveis, um produto das funes de e e uma funo de e N. T = f (,N). (). ()
(2.15)
O torque do motor normalmente medido por um dinammetro, ver gura 2.8. O motor preso em um banco de teste e conectado ao rotor. O rotor acoplado eletromagneticamente um estator, que apoiado em
2.7 Temperatura do Catalisador
19
rolamentos de baixo atrito. O torque exercido sobre o estator, com rotor girando medido por uma celular de carga (Heywood, 1988).
Figura 2.8: Esquema clula de carga .
2.7
Temperatura do Catalisador
Os catalisadores trivalente utilizados em motores combusto interna consistem em um material cataltico ativo em um invlucro de metal especialmente desenhada para dirigir o uxo de gs de escape atravs do leito do catalisador. O material ativo, empregado para a oxidao de CO e HC ou reduo do NO, deve ser distribudo sobre uma grande superfcie, para que a transferncia de massa entre o gas e a superfcie do catalisador ativo seja suciente para permitir a converso de cerca de 100 por cento, com alta atividade cataltica. O material cataltico ativo est impregnado em uma estrutura altamente poroso sobre 20m de espessura que aplicada nas paredes. A tpica monolita tem quadrados de seo transversal com dimenses dentro de aproximadamente um milmetro, separados por nas paredes porosas (0,15 a 0,3 milmetros). O nmero de dutos por centmetro quadrado varia entre 30 e 60 (Heywood, 1988). Devido sua elevada atividade intrnseca, os metais nobres so os mais adequados para os materiais catalticos. Uma mistura de platina (Pt) e paldio (Pd) mais comumente usado. Para a oxidao de CO, a atividade especca de Pd maior que a do PT. Para a oxidao de compostos aromticos, Pt e Pd tm atividade simular. Para a oxidao de hidrocarbonetos (com tamanho molecular maior), Pt mais ativo do que Pd (Heywood, 1988).
20
2 Reviso Bibliogrca
Figura 2.9: Esquema de um catalisador trivalente .
A ecincia de converso de um catalisador a relao entre a taxa de remoo em massa no catalisador: mGasO ut mGasI n
catal = 1
(2.16)
A variao de ecincia de converso de um catalisador com a temperatura mostrado na gura 2.10. Em altas temperaturas a ecincia de converso em estado estacionrio de um catalisador de oxidao novos so tipicamente 98-99 por cento das emisses de CO e 95 por cento ou mais para o HC. Contudo, o catalisador inecaz at a sua temperatura atingir valores superiores 250 ou 300o C. O termo temperatura de "light o" freqentemente usado para descrever a temperatura na qual o catalisador supera 50 por cento de ecincia (Heywood, 1988). Com o intuito de reduzir o tempo em atingir a temperatura de "light o"do catalisador, a pea instalada prximo ao motor. Assim, os gases de escape chegam ao catalisador em altas temperaturas agilizando o seu aquecimento. Com o conversor pr-instalado prximo ao motor, a temperatura no interior do conversor elevada, devido maior temperatura dos gases de escape. Assim, materiais catalticos podem atingir valores de temperaturas
2.7 Temperatura do Catalisador
21
Figura 2.10: Ecincia de converso do CO e HC versus temperatura do catalisador .
superiores a 1000 C (Becker and Watson, 1998). A desativao trmica de um catalisador trivalente inicia-se com temperatura de trabalho de 800 900 C, ou at mesmo em temperaturas mais baixas, dependendo dos materiais utilizados. Trs processos fsicos levam a desativao do catalisador em temperaturas elevadas. O primeiro processo devido perda de rea de superfcie cataltica por crescimento de cristais nas camadas do catalisador. O segundo devido a perda de rea esponjosa devido a um colapso da estrutura de poros. O terceiro processo devido as transformaes qumicas. Os dois primeiros processos so geralmente referidos como sinterizao, e o terceiro, como a transio de fase slido-slido em altas temperaturas (Bartholomew, 2001). Na gura 2.11, ilustrado os mecanismos de desativao de um catalisador trivalente. A gura 2.11A demonstre a formao de coque, resduos carbonosos cobrem as partes ativas de superfcie e diminuem a rea supercial ativa. A gura 2.11B o envenenamento de um catalisador trivalente, como resultado do acmulo de impurezas sobre as partes ativas tipicamente um fenmeno lento e irreversvel. A sinterizao, como ilustrado nas guras 2.11C e 2.11D, a perda de superfcie ativa do catalisador
22
2 Reviso Bibliogrca
devido ao crescimento de cristais de qualquer material.
Figura 2.11: Mecanismos de desativao: A) a formao de coque, B) contaminao, C) acumulo das partculas do metal ativo, D) sinterizao e transies de fase slido-slido do material cataltico e encapsulamento de partculas de metal ativo . Segundo Brandt et al. (2000), a m de adequao do modelo de ecincia de converso de um catalisador em um ciclo de conduo arbitrria, a temperatura do catalisador deve ser levado em conta. Especialmente durante a fase fria, quando temperatura do catalisador desempenha um
2.8 Redes neurais de funes de base radial regularizada
23
papel chave em determinar o tempo de "light-o". Antes do "light-o", mudanas de temperatura do catalisador so devidos a trmica absoro de energia a partir do gs de escape. Depois do "light-o", as mudanas de temperatura so principalmente devido a uma combinao de mtodos trmicos e processos qumicos. Brandt et al. (2000) prope um modelo da temperatura de catalisador para depois do "light o": 1 Tcatal = [Tlighto f f + fhot (,Tescape )
(2.17)
Onde a constante de tempo de primeira ordem, Tlighto f f a temperatura de "light o", a razo ar / combustvel relativa e Tescape a temperatura dos gases de escape. A temperatura dos gases de escape geralmente medida por um termopar tipo k. Tal temperatura afetada por (Heywood, 1988): 1234Velocidade do motor. Carga do motor Avano de ignio Lambda
2.8
2.8.1
Redes neurais de funes de base radial regularizada
Introduo
Atualmente, a tendncia de reduo do erro de estimao estimula a procura por modelos com uma rica classe funcional, por exemplo, um rede neural de funo de base com um grande nmero de neurnios. Considerando "overtting", evita-se o uso de regresso por mnimos quadrados para estimao de parmetros Poggio and Girosi (1990) e MacKay (1992). O modelo proposto atinge o objetivo de extrapolao, combinando suas
24
2 Reviso Bibliogrca
propriedades de suavidade, garantida pelo uso de regularizao, com uma explcita manipulao das condies de contorno. Na verdade, a estrutura do modelo tal, que condies de contorno zero pode ser aplicada facilmente em um ou dois eixos (Neve et al., 2009).
2.8.2
Denio do modelo
Segundo Neve et al. (2009), as redes neurais de funes de base regularizada so denidas por :
f (x1 ,x2 ,) = 0 + fx1 (x1 ,x1 ,x1 ) + fx2 (x2 ,x2 ,x2 ) + fx1 ,x2 (x1 ,x2 ,x1 x2 ) (2.18) 0 0 Onde:
x fx (x,x ,x ) 0
x x 0
+
0
RBF(,x )d
(2.19)
Sendo x = [x1
x2 ]
x1 0 0 x2
fx1 ,x2 (x1 ,x2 ,
x1 x2
)=
RBF(,,x1 x2 )dd
(2.20)
Nx
RBF(x,x ) =
i=1
x h( x xi ) i
(2.21)
Sendo x = [x1
x2 ]
Nx1 x2
RBF(x1 ,x2 , Onde:
x1 .x2
)=
i=1
x1 x2 h( [x1 i
x2 ]T [xi1
xi2 ]T )
(2.22)
h() = e 2c2
(2.23)
2.8 Redes neurais de funes de base radial regularizada
25
Nas expresses anteriores, RBF denota-se uma rede neural de funo de base radial, RBFNN, com funo de base gaussiana. Os centros so representados por xi da rede RBF(x,x ) de uma dimenso e [xi1 xi2 ] da x1 x2 rede RBF(x1 ,x2 , ) de duas dimenses. Tais centros so localizados regularmente espaados abrangendo a regio de operao, assim, escolhendo redes de uma dimenso com 21 x 1 centros e redes de duas dimenses com 21 x 21 centros, ento, Nx1 igual a Nx2 igual a 21 e Nx1 .x2 igual a 441. Para um valor xo de c, que controla a largura da gaussiana, o modelo global linear no vetor de 486 parmetros ento: = [0 Onde: 0 x1 0 x2 0 x1 x2 x1 x2
1
x1 0
x2 0
x1
x2
x1 x2 ]T
(2.24)
; ; ; ; ; ;
1 1
Nx1 Nx2
Nx1 x2
Portanto, q , onde q = 3 + Nx1 + Nx2 + Nx1 x2 . O uso de RBFs integradas um meio de reduzir o erro de polaridade. De fato, a RBFNN padro tende a zero fora do range de dados, isto diculta as propriedades de extrapolao do modelo, sobretudo, quando o superfcie no-estacionria, em funo das entradas x1 e x2 .
2.8.3
Estimao dos parmetros
Os dados de treinamento so escritos pela matriz:
D = [y Onde: y = [y1 , . . . ,yN ]T
x1
x2 ]
(2.25)
x1 = [x1 , . . . ,xN ]T 1 1
x2 = [x1 , . . . ,xN ]T 2 2
(2.26)
26
2 Reviso Bibliogrca
Os vetores x1 e x2 so os dados de entrada e o vetor y o dado medido a ser estimado. Dado o nmero de parmetros (q = 486) normalmente muito maior que o nmero de dados do experimento medido (tipicamente, N 100). Portanto, a utilizao da regresso por mnimos quadrados para a identicao dos paramento claramente inadequado. Pelo contrrio, a estimao do vetor de parmetros realizado por:
= argmin
J ()
(2.27)
J () = SSR() +
(2.28)
Onde = [x1 x2 x1 x2 ]T , SSR a soma do quadrado do resduo e o parmetro de regularizao. Observe que o clculo de se reduz em uma soluo de um sistema de equaes lineares (Poggio and Girosi, 1990). Se um valor "pequeno", a superfcie tendem ser rugosa e, no limite em que 0 (ver exemplo na gura 2.12), a interpolao dos dados ser obtida. Por outro lado, maior produz superfcies mais suavizadas (ver gura 2.13), no limite superior, a superfcie ser um plano, porque os coecientes 0 , x1 e x2 da parte linear do modelo no so penalizados 0 0 pela funo de custo J (). Com o objetivo de encontrar o melhor compromisso para a denio de , o seu valor denido pela minimizao do critrio de validao generalizada. SSR (N q())2
GCV() = N
(2.29)
Onde q() chamado de graus de liberdade equivalente, um nmero que neste caso varia de 3 (os graus de liberdade de um plano) para o nmero N e varia de zero . O grau de liberdade q() denido como a soma dos elementos da diagonal da matriz H, onde H chamado de "matriz chapu"(MacKay, 1992). Sendo zk = f (xk ,xk ,) a sada da rede de entrada 1 2 (xk ,xk ), a matriz H tal que [z1 . . . z ]T = H[z1 . . . zN ]T . A minimizao GCV N 1 2
2.9 Representaes No-Lineares
27
Figura 2.12: Exemplo de um RBFNN padro (Neve et al., 2009) . usada para otimizar conjuntamente e c (a largura da funo de base gaussiana). A estabilidade do estimado em funo do nmero de dados foi recentemente investigada por M. and G. (2007) para mapa do uxo de ar de admisso do motor.
2.9
2.9.1
Representaes No-Lineares
Introduo
Na prtica sistemas dinmicos so no lineares, mas, em alguns casos, uma representao linear explica bem a aplicao prtica. A escolha de modelos no-lineares pode trazer um aumento na complexidade dos algoritmos. Para escolher qual modelo utilizar, devemos analisar no somente a exatido do modelo, mas tambm o regime dinmico. Modelos no lineares produzem regimes dinmicos que o modelo linear no consegue representar (Aguirre, 2000).
28
2 Reviso Bibliogrca
Figura 2.13: Exemplo de um RBFNN regularizada (Neve et al., 2009) .
H uma grande variedade de representaes no-lineares. Ser discutido dois tipos de representao, que sero utilizadas neste trabalho, so elas modelo de Hammerstein e modelos no-linear auto-regressivo de mdia mvel com entradas exgenas, NARMAX, usando funes radiais de base.
2.9.2
Modelos de Hammerstein
O modelo Hammerstein consiste em um modelo esttico no-linear em srie com um modelo dinmico linear (ver gura 2.14). Se os blocos lineares e no lineares so transpostos, obtm-se o modelo de Wiener. Os parmetros do modelo so determinadas usando os dados de entradasada do processo real (Fruzzetti and McDonald, 1997). Desde o inicio da identicao no-linear, os modelos de blocos orientados foram classicados como casos particulares do modelo geral NARX e podem ser descrito como (Aguirre et al., 2005):
2.9 Representaes No-Lineares
29
Figura 2.14: Modelo geral Hammerstein (Fruzzetti and McDonald, 1997) .
y(k) = Fl [y(k 1), . . . ,y(k n y ),u(k d), . . . ,u(k nu ),e(k)]
(2.30)
Onde u(k), y(k) so, respectivamente, sinais de entrada e sada e e(k) contempla as incertezas, rudo e dinmica no modelados. Neste trabalho Fl um polinmio com grau de no-linearidade l Z+ . Os modelos Hammerstein originam-se dos modelos no-linear autoregressivo com entradas exgenas, NARX. Em particular, demonstrado em que condies um modelo polinomial NARX pode ser representado como um Hammerstein. Se a no-linearidade f(o ) atuar somente na entradas do modelo ARX, o resultado um modelo Hammerstein. Omitindo os termos de rudo para uma questo de clareza, tem-se (Aguirre et al., 2005):
y(k) = a1 y(k 1) + . . . + any y(k n y ) + f [u(k d), . . . ,u(k nu )]
(2.31)
Uma vez que a funo esttica f(o ) conhecida, a identicao dos modelos de Hammerstein simples. Da funo esttica, o sinal interno pode ser facilmente produzidos, assim v(k) = f (u(k)). Posteriormente, um modelo autoregressivo com entradas exgenas, ARX, relacionam a sada y(k) e o sinal interno v(k), seus coecientes podem ser obtidos atravs de tcnicas lineares.
30
2 Reviso Bibliogrca
v(k i) = f l (u(k i)),
i = 1,2, . . . ,nu
(2.32)
Sendo f l , o modelo esttico no linear. Na forma padro do modelo ARX.
ny nv
y(k) =
j=1
j y(k j) +
i=1
i v(k i)
(2.33)
Substituindo 2.32 no 2.33:
ny nv
y(k) =
j=1
j y(k j) +
i=1
i f l (u(k i))
(2.34)
A funo esttica f( ), entre o sinal interno e a sada, uma relao esttica entre a entrada e a sada, mas por um fator constante, que o ganho de o modelo ARX. Se o ganho DC de um tal modelo assumido unitrio, ento em estado estacionrio u(k) = v(k) e f(o ) de fato a funo esttica entre a entrada e a sada. Esta funo usado para produzir um grco de y u = v e as tcnicas de regresso linear podem ser aplicadas para obter uma funo v = g( y).
2.9.3
Modelos NARMAX usando funes radiais de base
O desenvolvimento de identicao para sistemas discretos no tempo largamente baseada nos modelos lineares (Chen et al., 1990).
ny nu ne
y(k) =
i=1
biy y(k i) +
i=1
biu u(k i) +
i=1
bie e(k i) + e(k)
(2.35)
Onde y(k), u(k) e e(k) so sada do sistema, entrada e ruido respectivamente. n y , nu e ne so o mximo atraso para a sada, entrada e ruido respectivamente. E e(k) assumido ser um rudo branco. A equao 2.35 conhecida como modelo ARMAX.
2.9 Representaes No-Lineares
31
Estendendo a abordagem linear de grande sucesso para o caso nolinear (Chen et al., 1990):
ny nu ne
y(k) = f [
i=1
biy y(k
i) +
i=1
biu u(k
i) +
i=1
bie e(k i)] + e(k)
(2.36)
onde f[.] uma funo no-linear. O modelo 2.36 muitas vezes referido como o modelo NARMAX por causa de sua semelhana com 2.35. Ao mesmo no caso em que uma fonte de rudo branco entra no sistema como uma varivel de entrada, o modelo do sistema pode ser simplicada como:
ny nu
y(k) = f [
i=1
biy y(k
i) +
i=1
biu u(k i)] + e(k)
(2.37)
A equao 2.37 , obviamente, muito geral. A forma funcional f[o ]para um sistema real pode ser muito complicado e raramente conhecida a priori. O modelo deve ser construdo com base em algumas funes conhecidas simplicadas. O presente estudo emprega uma expanso RBF ao modelo. Como j foi visto, as funes radiais de base so mapeadas do tipo:
Nc
f ( y) = 0 +
i
i ( y ci )
(2.38)
Sendo que y Rde e o a norma euclidiana, i R so pesos, Nc o numero de centros ci Rde e (o ) : R+ R a funo de base gaussiana denida por:
c yi 2 2 i
( y ci ) = e
(2.39)
Onde i a largura da gaussiana e constante e y ci 2 = ( y ci )T ( y ci ). Em (Chen et al., 1990), a equao 2.39 pode ser implementada na estrutura da rede de duas camadas representadas na gura 2.15. Dado centros xos, a primeira camada executa uma transformao no-linear
32
2 Reviso Bibliogrca
Figura 2.15: Expanso RBF (Chen et al., 1990) .
que mapeia o espao de entrada para um novo espao e a camada de sada implementa um combinao linear sobre este novo espao. Portanto:
Nc
y(k) = 0 +
i
i ( (k 1) ci )
(2.40)
Sendo (k 1) = [y(k 1) . . . y(k n y ) u(k 1) . . . u(k nu )]T . No contexto de identicao de sistemas, comum acrescentar termos auto-regressivos lineares, bem como termos de entrada a funo 2.40 (Aguirre, 2000).
2.9 Representaes No-Lineares
33
Nc
ny
nu
y(k) = 0 +
i
i ( (k 1) ci ) +
i=1
biy y(k
i) +
i=1
biu u(k i) + e(k) (2.41)
O vetor de parmetros = [0 1 . . . Nc a1 . . . any b1 . . . bny ]. No caso do sistema possuir atraso puro de tempo, d , os termos lineares de entrada comeariam com u(k d ). Em 2.41, Rq , sendo que a dimenso do vetor de parmetros q = 1 + Nc + n y + nu . As funes radiais de base so casos particulares de redes neurais, mas, ao contrrio destas, so lineares nos parmetros , conforme equao 2.41. Se a funo : R+ R e os centros ci so conhecidos, os parmetros podem ser estimados utilizando regresso por mnimos quadrados (Aguirre, 2000).
2.9.4
Regresso por mnimo quadrados estendidos
y = f (x,) (2.42)
Sendo conhecidos os conjuntos y1 , . . . ,yN e x1 , . . . ,xN , possvel determinar f e . Para tal a funo 2.42 devem respeitar trs condies: Considerao 1 A funo f e o vetor no variam de uma restrio a outra. A funo pode ser reescrita como y = XT , isto , linear nos parmetros .
Considerao 2
O numero de dados observado, N, deve ser maior ou igual ao tamanho do vetor . Considerando valores estimados do vetor de parmetros , comete-se um erro ao tentar explicar os valores observados y: Y = X + Sendo RN .
Considerao 3
(2.43)
34 Denindo o somatrio do quadrado dos erros:
N
2 Reviso Bibliogrca
JMQ =
i=1
(i)2 =
(2.44)
JMQ = (Y X)T (Y X) = YT Y YT X XT T y + XT T X
(2.45)
Minimizando a funo custo JMQ em funo de , necessrio resolver: JMQ =0 Ento: JMQ = XT Y XT y + 2XT X Portanto:
(2.46)
(2.47)
= [XT X]1 XT Y Reescrevendo:
(2.48)
= [T ]1 T Y Onde denominado como matriz de regressores. No caso do modelo ARMAX, exemplicado como:
(2.49)
y(k) = ay(k 1) + bu(k 1) + c(k 1) + (k)
(2.50)
Sendo que (k) rudo branco e e(k) = c(k 1) + (k) um processo mdia mvel (MA do ingls "moving average"). Assim:
2.9 Representaes No-Lineares
35
(k 1) = [y(k 1)
u(k 1)
(k 1)]
(2.51)
Captulo 3
Experimento
3.1
Motor E.torq
Figura 3.1: E.torQ 1.6 16V . O motor E.torq foi baseado no antigo motor Tritec produzidos por uma parceria entre a BMW e a Chrysler. A fbrica era localizada em Campo Largo, Pr. e produzia motores 1.4 e 1.6 apenas para exportao. Foi criada nos anos 90, mas a situao cou conturbada quando aes da Chrysler foi comprada pela Mercedes-Benz, rival da BMW. Os motores, que eram feitos l, equipavam modelos da BMW, da MINI, o Chrysler PT Cruiser, etc. O problema que os motores Tritec s funcionavam com gasolina sem adio de lcool. E ainda os motores feitos l, at ento, eram apenas dois
38
3 Experimento
modelos: 1.4 de 16 vlvulas com 75 cavalos e 1.6 de 16 vlvulas com 115 cavalos. Foi produzido tambm um modelo 1.6 com supercharger de 163 cavalos, mas foi descartado. Em 2008 Fiat Powertrain Technologies, FPT, assinou um acordo com a Chrysler L.L. C para a aquisio integral da fbrica da Tritec Motors. O investimento inicial foi de R$ 250 milhes. Aps esta aquisio, a FPT desenvolveu uma srie de novos contedos, para somar qualidades slida e tecnolgica base oferecida pelos motores da Tritec. Ao todo, 70% do motor novo, o que inclui componentes como bloco, virabrequim, bielas, pistes, coletor de aspirao, trem de vlvulas, sistema de injeo eletrnica, volante do motor, bomba dgua e direo hidrulica, tampa de vlvulas, junta do cabeote e bicos injetores, entre outros. Na tabela 3.1 segue a cha tcnica. Tabela 3.1: Ficha tcnica E.torQ 1.6 16V E.torQ 1.6 16v 1.6 FLEX - Etanol/Gasolina 117cv @ 5500rpm (etanol) 115cv @ 5500rpm (gasol.) Torque mximo 16,8kgfm @ 4500rpm (etanol) 16,2kgfm @ 4500rpm (gasol.) Dimetro x Curso 77,0mm X 85,8mm Taxa de compresso 10,5 : 1 Emisses Proconve F-V Injeo Eletrnica Magnetti Marelli - IAW 7GF Ficha tcnica Cilindrada Combustvel Potncia mxima
3.1.1
Sistema de gerenciamento do motor
Nos motores E.torQ 1.6 16V, o sistema de gerenciamento constitudo de 10 sensores e 11 atuadores eltricos, conectados a central eletrnica da Magneti Marelli, IAW 7GF (Cirilo et al., 2009). Para a construo das aproximaes propostas sero utilizados os sinais do sensor de giro, da presso absoluta do coletor, do avano de ignio e
3.1 Motor E.torq
39
dos parmetros ambientais (temperaturas e presso). A tabela 3.2 lista os sensores utilizados. Tabela 3.2: Lista de sensores utilizados do E.torQ 1.6 16V Sensores Descrio Sensor de velocidade Sensor Efeito Hall - JCI Sensor de rotao Sensor Efeito Hall - Continental Sensor de presso absoluta do coletor Sensor de presso - Bosch Sensor de temperatura do coletor Sensor Termo-Resistivo - Bosch Sensor de temperatura da gua Sensor Termo-Resistivo - Hi-stat
O sensor de rotao instalado rente a roda fnica com 60 dentes cravados, ento, por efeito hall os dentes da roda so detectados, enviando para a central eletrnica um trem de pulsos. O tratamento do sinal realizado dentro da ECU, calculando a velocidade do motor em rotaes por minuto. Da mesma forma, calculada a velocidade do veculo, mas em vez da roda fnica, o sensor instalado rente a engrenagem do cambio. O sensor de presso absoluta do coletor a grandezas mais importante para o calculo da ecincia volumtrica, sua especicao segue na tabela 3.5. Tabela 3.3: Especicao do sensor Bosch de presso absoluta (Cirilo et al., 2009) Especicao Range de Presso 10 115 kPa 5V 0,25 Fonte de Alimentao Capacitncia de entrada 12nF Tempo de Resposta 1,0 ms
O sensor de temperatura da gua termo-resistivo com a resistncia eltrica de 10K ohm e o sensor de temperatura do coletor tambm termoresistivo com resistncia eltrica de 2.5K ohm. Para realizar a medio das variveis da ECU, foi utilizado o software INCA da empresa ETAS. Este software fornece a medio completa e o
40
3 Experimento
gerenciamento de calibrao conectando memria ash da ECU de desenvolvimento. Um banco de dados integrado permite a reutilizao rpida e fcil das conguraes de compilao em testes de motores. Usando as interfaces abertas, o INCA pode ser automatizado e integrado com a bancada de teste, com o hardware-in-the-loop ou com outras ferramentas. Tambm suporta a ECU para a medio e calibrao do sistema, as interfaces de banco de ensaio, o intercmbio de dados de medio e protocolos de comunicao. A gura 3.2 ilustra o layout deste software.
Figura 3.2: Ilustrao do software INCA da empresa ETAS .
3.2
Dinammetro para ensaio de motores
O principal equipamento do laboratrio de ensaio de motores o dinammetro. Os motores so submetidos a testes para quanticar o de-
3.2 Dinammetro para ensaio de motores
41
sempenho, gerar dados para a realizao da calibrao de base da ECM e validao das caractersticas construtivas. Um tpico dinammetro dinmico ilustrado na gura 3.3 e composto pelos seguintes componentes (AVL, 2004): 1 2 3 4 5 6 7 8 9 10 Dinammetro altamente dinmico; Motores a combusto; Eixo Cardan; Disco de Embreagem; Medidor de combustvel; Painel de controle Placa de conexo de sinais analgicos e termopares KIWI Board, no qual usado para conectar o dinammetro no PUMA OPEN PC; Multi-Link board PUMA Open PC
O dinammetro capaz de medir a potncia, trabalho executado na unidade de tempo, de um motor em suas diversas condies de funcionamento. Neste presente trabalho, o controle do dinammetro feito pelo Pum Open Pc e pelo painel de controle, ambos so ilustrados na gura 3.3. Os sinais adicionais necessrios so medidos atravs da placa de conexo de sinais analgicos e termopares. Foi instrumentado a temperatura do centro do catalisador e do gs de escape. Os termopares utilizados foram do tipo K, com faixa de utilizao de -270 C a 1200 C. O consumo de combustvel foi medido pelo mdulo da AVL ilustrado pelo item 5 da gura 3.3, o uxo de ar foi medido por um anemmetro de lme quente da ABB e o relao A/F foi medido pelo analisador A/F Horiba.
3.2.1
Medidor de combustvel
Em todo o mundo, us-se uma combinao de balana combustvel e controle de temperatura para medio da vazo do combustvel. A balana AVL 733S usado, principalmente onde necessria alta preciso de medio. A medio baseada no princpio gravimtrico, a quantidade de consumo de combustvel determinado diretamente pelo peso do com-
42
3 Experimento
Figura 3.3: Ilustrao tpica de uma dinammetro .
3.2 Dinammetro para ensaio de motores
43
bustvel que consumido, medido por um sensor capacitivo. A tabela 3.4 descreve os dados tcnicos da balana usada. Tabela 3.4: Dados tcnicos da balana AVL 733S Range de Medio 0 150 kg/h 2g Preciso Temperatura ambiente 5 50 C -10 70 C Temperatura do combustvel Interfaces AVL 753C RS232 0 ... 10 V Sada Analgica Alimentao 220 V, 60 Hz 770 x 1350 x 345 mm (W x H x D) Dimenses Peso (seco) 135 kg
A preciso de medio da vazo depender do peso medido, se o peso for baixo (a preciso da balana especicada de 2g), o erro de medida relevante. Portanto, para obter erros menores que 1%, necessrio garantir que o peso do combustvel consumido seja superior a 200g.
3.2.2
Medidor de uxo de ar
Para a medio do uxo de ar de admisso foi usado o medidor Thermal Mass Flowmeter FMT700-P DN80, Sensyow P, da empresa ABB. Este opera de acordo com o princpio de um anemmetro de lme quente. Assim, o uxo de massa do gs pode ser determinada diretamente, sem a necessidade de compensao de temperatura e presso (ABB, 2011). O FMT700-P DN80 (Sensyow P) compreende em um transdutor (tubo de medio), uma unidade de alimentao/avaliao e uma seo de medio. O transdutor projetado como um tubo de medio e acomoda o sensor e um circuito transmissor eletrnico. A taxa de medio ajustvel de acordo com velocidade do gs medido, em casos de alta velocidade de medio, o tempo de resposta pode ser reduzido a 1ms. A tabela 3.5 descreve os dados tcnicos do medidor. Para amenizar a ressonncia e a atenuao na medio, o fabricante sugere um esquema para a montagem do transdutor. A gura 3.4 ilustra tal esquema.
44
3 Experimento
Tabela 3.5: Especicao tcnica (ABB, 2011) Especicao Range de Medio 0 720kg/h < 1% do valor medido Preciso Tempo de resposta 12ms -25 +80 C Temperatura ambiente para o transdutor Tenso de alimentao 230 V AC ou 110 V AC
Figura 3.4: Sees padro de medio (ABB, 2011) .
3.2 Dinammetro para ensaio de motores Atenuao e Correo
45
Em medidas turbulentas usando um anemmetro de lme quente, geralmente supem-se que a resposta em freqncia do sistema semelhante a um ltro passa-baixa, assim, possui resposta constante em baixas freqncias e uma gradual atenuao, perto da freqncia de corte. O sistema de o-quente pode ser calibrado usando um mtodo de calibrao esttico (calibrar o sistema em vrias velocidades mdias) ou um mtodo de calibrao dinmica (Li, 2007). Em Li (2006), implcito assumir que o sistema de o-quente comportase como um ltro passa-baixa com o freqncia de corte, 1 1
fc =
(3.1)
sendo 1 , o momento em que resposta a uma entrada step decai em -3 dB. Segundo Li (2007) o ltro passa baixa pode ser construdo como, HB ( f ) 1 E( f ) 1 + (0. 5 f / fc )
H( f ) =
f < fc
(3.2)
H( f ) =
1 1 + (0. 5 f / fc )
f fc
(3.3)
onde constante para ajuste da resposta em freqncia do ltro, E( f ) a densidade espectral de energia e HB funo de transferncia de um ltro Butterworth Considerando o tempo de resposta de 12ms (ver tabela 3.5) e a equao 3.1, a frequncia de corte 83,3Hz. A frequncia de amostragem ser denida posteriormente, mas certamente ser inferior 10Hz. Portanto, por trabalhar em baixas freqncias, aproxim-se a expresso HB ( f )/E( f ) uma constante dependendo da 1 condio do motor e a expresso 1+(0.5 f / fc ) igual 1. Assim, H( f ) = K(n,pmam ) (3.4)
46
3 Experimento
onde n a rotao do motor e pmam a presso do coletor de admisso. Para calculo de K(n,pmam ) ser usando um mtodo de calibrao esttico, tal mtodo utilizar um experimento esttico e comparar a medida do anemmetro de lme quente uma medida indireta uxo de ar. A medida indireta consiste em medir a massa de combustvel consumida e a relao ar/combustvel da queima, calculando assim, a massa de ar admitida pelo motor (Heywood, 1988). A marindireta = mcomb (Kg/h) F
(3.5)
Onde mcomb representa a massa de combustvel em Kg injetada por hora. Portanto,
K(n,pmam ) = marindireta map onde map representa a uxo de ar medido pelo anemmetro.
(3.6)
3.2.3
Analisador de A / F
Figura 3.5: Analisador de A / F - MEXA 700 da empresa Horiba .
3.3 Experimento Esttico
47
Para medio da razo ar-combustvel foi usado o analisador de A/F, MEXA 700 da empresa Horiba. A medio calculada utilizando um sensor de oxignio localizado no coletor de escape, o sensor compara a concentrao de oxignio dos gases de escape com os ambientais. A tabela 3.6 descreve os dados tcnicos do analisador. Tabela 3.6: Especicao tcnica do analisador de A/F Unidade de Controle Faixa de exibio Preciso
Tempo de resposta Fonte de alimentao Sensor de Oxignio Temperatura do gs Aquecedor de controle de temperatura
3,99 500,0 de 9,5 ao A/F estequiomtrico: 0,3 no A/F estequiomtrico: 0,1 do A/F estequiomtrico 20,0: 0,3 Tpico 80ms 30/10 V DC, 50 W -7 900o C PID
Se a concentrao no escape for menor que os valores ambientais signica mistura rica, o maior que 1. Se a concentrao for maior, o menor que 1.
3.3
Experimento Esttico
O experimento esttico, como prprio nome diz, um ensaio em condies estabilizadas. As entradas so devidamente impostadas no dinammetro (por exemplo: rotao, carga e temperaturas de trabalho) e tambm impostadas na ECU (por exemplo: avano de ignio, quantidade de combustvel e ngulo da borboleta). Quando todas as variveis estiverem em regime permanente, a aquisio inicializada por um tempo determinado, que no caso deste experimento, depender do consumo de combustvel como foi discutido em seo anterior. As medidas nais so as mdias de todos os pontos medidos durante esse intervalo de tempo. Para a determinao das entradas utilizamos a teoria discutida no capitulo 2. Na seo ecincia volumtrica, foi descrito que a rotao do
48
3 Experimento
motor, presso do coletor de admisso e condies ambientais inuenciam a ecincia volumtrica. Tambm foi visto que o torque , em geral, uma funo das variveis: avano de ignio, razo A/F relativa (), rotao do motor e presso no coletor de admisso. E para calculo estimativa da temperatura de catalisador utilizaremos as mesmas variveis de dependncia que as do torque efetivo. Em resumo, foram escolhidas os sinais de entrada: avano de ignio, razo A/F relativa, velocidade da rotao do motor e presso no coletor de admisso. As condies ambientais foram medidas e controladas. Durante a prova a presso atmosfrica foi de 906 mbar, a temperatura da gua foi impostada em 92o C e temperatura do ar no coletor impostada em 40o C. Por meio do software Puma Open foram impostados a rotao do motor e o pedal do acelerador. E por uma ECU de desenvolvimento (7GF) e o software INCA impostamos a presso do coletor, avano de ignio e a razo A/F relativa. Para calculo do rendimento volumtrico foi medido o uxo de ar de admisso, tambm foram aquisitados o torque efetivo e a temperatura de catalisador. Tais sinais foram gravadas pelo software Puma Open conectado ao dinammetro e a uma placa de conexo de sinais analgicos e termopares. O sincronismo dos dados entre o INCA e o Puma Open foi realizado em ambiente MatLab. A escolha dos pontos de medio foi denido utilizando o conhecimento prvio sobre o sistema, abrangendo todo o range de trabalho do motor. Entretanto, devido a limitaes de hardware, alguns pontos no podem ser medidos. Como em baixas rotaes, pois ao estabilizar a rotao abaixo de 1200 rpm, pode ocorre uma elevada vibrao, causando a ruptura do acoplamento entre o dinammetro e o motor. Outra limitao, a variao da razo A/F relativa em altas rotaes e altas cargas, ao elevar o valor da razo A/F relativa, eleva-se muito a temperatura de catalisador, podendo danicar a pea. Ento, limita-se o valor desta razo para temperatura mxima de catalisador de 970o C. Por uma questo de organizao, dividimos os dados em trs experimentos. No primeiro experimento, a rotao e a ecincia volumtrica foram as variveis de entrada. Os pontos de trabalho de rotao foram de 1400, 1600, 1800, 2000, 2300, 2500, 3000, 3500, 3800, 4100, 4500, 4900, 5250, 5800 e 6200 rpm. Para a ecincia volumtrica escolhemos 0,23; 0,3; 0,35; 0,45; 0,5; 0,55; 0,65; 0,75 e "maior valor". Se o maior valor for prximo
3.3 Experimento Esttico
49
Figura 3.6: Experimento esttico 1 .
0.75, evita-se de repetir a medio. Ao todo foram 135 pontos aquisitados. Ver gura 3.6. No segundo experimento, foram escolhidos os pontos de medio, variando o avano de ignio em alguns valores de rotao e ecincia volumtrica. Os pontos de trabalho escolhidos de rotao foram 2000, 3000, 4100, 4900 e 6200 rpm, para a ecincia volumtrica escolhemos 0,23; 0,35; 0,5; 0,65; 0,75 e "maior valor". No caso do avano de ignio foram escolhidos 6 pontos distintos, espaados de 2 em 2 graus at o avano de mximo torque. Foram ao todo 200 pontos medidos. Ver gura 3.7. No terceiro experimento, as entradas foram denidas por rotao, ecincia volumtrica e a razo A/F relativa. Abrangendo o mximo o range da razo A/F relativa. Para tal, os valores escolhidos de rotao foram 2500, 3000, 3500, 3800, 4500, 5250, 5800 e 6200. e os da ecincia volumtrica foram 0,6; 0,75 "maior valor". Os pontos aquisitados da razo A/F relativa foram 0,75; 0,8; 0,85; 0,9; 0,95; 0,975 e 1. Ao todo foram 148 pontos. Ver gura 3.8. Alm das variveis de entrada e as de sadas foram medidos os sinais
50
3 Experimento
Figura 3.7: Experimento esttico 2
. Figura 3.8: Experimento esttico 3 .
3.3 Experimento Esttico
51
das condies ambientais e sinais de controle da ECU. A tabela 3.7 listam as variveis medidas. Tabela 3.7: Lista de variveis medidas. Variveis Range Descrio RPM 0 6000 rpm Rotao do motor PERAPDL 0 100% Pedal do acelerador 0 300 kg/h Fluxo de ar ARCONS PREM 0 1000 mbar Presso do coletor ANGFARLW 0 82o ngulo de borboleta 4 20 Razo A/F A/F 0,4 3 Razo A/F relativa LAMBDA COMBCONS 1 30 Kg/h Consumo de Combustvel ADVOBJ -15 60o Avano de ignio o TCATAL 40 950 C Temperatura do catalisador o 40 950 C Temperatura dos gases de escape TEX 0 100 o C Temperatura da gua do motor TH2OC o TAIRC 0 60 C Temperatura do ar de admisso 500 1200mbar Presso Atmosfrica PREATM
A varivel ARCONS a medida sem compensao do uxo de ar. Para aplicar tal correo, necessrio calcul-la utilizando as equaes 3.5 e 3.6, assim:
K(RPM,PREM) = COMBCONS. A/F ARCONS
(3.7)
Com o intuito de utilizar tal correo inclusive para os experimentos dinmicos, foi utilizado uma rede neural de funes de base radial regularizada, discutida no capitulo anterior, onde obteve-se uma equao para correo, ver 3.8. Para tal, o "primeiro experimento", descrito anteriormente, foi escolhido para estimarmos os parmetros da rede. Foi impostado o nmero de centros, NC , igual a 21, o sigma igual a 0,1 e o parmetro de regularizao igual 0,1. O grco 3.10 ilustra a sada da rede.
fcorr (RPM,PREM,) K(RPM,PREM)
(3.8)
52
3 Experimento
Figura 3.9: Correo da atenuao de medida do uxo de ar .
Aplicando a correo ao sinal de uxo medido obtm-se:
ARCONSCOR = fcorr (RPM,PREM,) + ARCONS
(3.9)
A gura 3.10 ilustra a sada corregida e o sinal da medio indireta. Para o calculo da ecincia volumtrica foi usado a equao 2.8, entretanto, como o experimento esttico, a variao da presso no coletor de admisso, pmam , tende a 0. Portanto, reescreve-se a equao como ARCONSCOR 0,5 Vd . atm . 4 60. RPM
v =
(3.10)
onde Vd igual a 399E6 m3 para o motor escolhido e atm a densidade do ar ( 40o C ao nvel do mar) igual a 1,126 kg/m3 . Ento, ARCONSCOR . 0,5. 399E6 . 1,126. 4. 60. RPM
v =
(3.11)
3.4 Experimento Dinmico
53
Figura 3.10: Medies das vazo de ar .
3.4
Experimento Dinmico
No experimento dinmico, simulamos um veculo, um condutor e um ciclo. Para tal, foi usado o pacote de software ISAC, Inertia Simulation And Control, que capaz justamente de simular o veculo, o motorista e o percurso. Este pacote est incluso ao Puma Open Pc.
3.4.1
ISAC, Inertia Simulation And Control
Durante a simulao do veculo, todas as foras que atuam sobre um veculo na estrada em condies reais pode ser simulado no pacote ISAC atravs da aplicao de modelos matemticos. As foras a seguir devem ser simuladas:
54
3 Experimento
Carga rodoviria Inclinao da estrada Momentos de inrcia dos componentes que no esto sicamente presentes dinammetro (transmisso, rodas, etc.). A carga rodoviria a soma de todas as resistncias que um veculo deve suportar em uma estrada plana . Ver gura 3.11.
Figura 3.11: Carga rodoviria em uma estrada plena .
O gradiente de resistncia a fora que um veculo tem de superar em subidas. obtido atravs da simulao da inclinao da estrada. A seguinte frmula aplicada para determinar o gradiente de resistncia.
FSlope = m. g. sen()
(3.12)
Tambm necessrio considerar os momentos de inrcia de cada componentes do veculo para obteno de resultados mais realsticas durante simulao. Os componentes so simulados por modelos matemticos dentro do ISAC. Os momentos de inrcia dos componentes descrito abaixo so relevantes para a simulao de veculos com ISAC:
3.4 Experimento Dinmico
55
Figura 3.12: Gradiente de resistncia .
123456-
Motor (real) Transmisso Eixo Cardan Rodas, diferencial e eixos Veculo (simulado) Momentos de inrcia dos componentes do veculo no apresentar, reduzida a um valor
Figura 3.13: Componentes com momentos de inrcia . Para calculo da carga rodoviria e dos momentos de inercias, foram
56
3 Experimento
utilizados dados de projeto do veculo Punto Essense 1.6 16V Flex. Na simulao do condutor, simulamos um comportamento realisto pelo sistema ISAC, onde consideramos: o acoplamento da embreagem, o uso do pedal do acelerador e as troca de marchas. A implementao grca e muito simples. Ver gura 3.14. Todos os parmetros do condutor utilizado neste presente trabalho eram pr-existente como exemplo no ISAC. Futuramente, pode-se aproximar tais parmetros por uma aquisio de um condutor real em um trajeto pr estabelecido.
Figura 3.14: Denio de troca de marcha .
J denidas a parametrizao do veculo e a do condutor, falta descrever o percurso. Para sua denio, o sistema ISAC permite varias combinaes de entrada. Para o presente trabalho ser utilizada apenas a combinao velocidade/inclinao da rodovia.
3.4 Experimento Dinmico
57
3.4.2
Denio do experimento
Denio do ciclo O percurso dinmico escolhido origina-se do ciclo FTP 75 (Federal Test Procedure) descrito na norma NBR 6601 (ABNT., 2004). Esta norma adota a rotina americana FTP-75 como o padro para os testes de emisses no Brasil. A rotina denida como um grco que relaciona velocidade e tempo, ver gura 3.15.
Figura 3.15: Ciclo FPT 75 (ABNT., 2004) . O ciclo composto de trs fases. A primeira com 505 segundos representam a fase transitria aps a partida a frio e cobrem uma distncia de 5,78 km a uma velocidade mdia de 41,2 km/h. A segunda fase do ciclo representa a fase estabilizada, com durao de 867 s, distncia de 6,32 km e velocidade mdia de 22,55 km/h. Aps um intervalo de 10 minutos, inicializa-se a terceira fase denominada fase transitria a quente, onde repete a primeira fase. O teste completo totaliza 17,88 km em 41,28 minutos, conforme foi ilustrado na gura 3.15. Por uma questo de simplicao, iniciaremos a teste com o motor quente 92o C. Portanto, a primeira fase e a terceira fase seriam idnticas.
58
3 Experimento
Ento, foi denido como experimento dinmico as duas primeiras fases do ciclo FTP-75, mas com o motor inicializando a temperatura regimada de 92o C. Este novo ciclo pode ser chamado de FTP-72 Hot. Ver gura 3.16.
Figura 3.16: Ciclo FPT 72 Hot .
Ser avaliado se o ciclo persistentemente excitante. Para tal consideramos um sinal u(k) persistentemente excitante de ordem n, se os limites (Aguirre, 2000)
1 u = lim N N
u(k)
k=1
(3.13)
1 ruu (k) = lim N N existirem e se a matriz
(u(i) u)(u(i) u)
i=1
(3.14)
3.4 Experimento Dinmico
59
Rn = [ruu (i j)]i j uu
i = 1, . . . ,n; j = 1, . . . ,n;
(3.15)
for no singular. Consideramos u(k) como sendo a velocidade no ciclo. Entretanto, a velocidade uma consequncia da rotao do motor, ento tambm consideraremos um outro u(k) como sendo a rotao do motor. A gura 3.17 ilustra a autocovarincia, ruu , da velocidade e da rotao do motor amostradas a 1Hz. A autocovarincia da rotao mais excitada que da velocidade devido a absoro de energia da transmisso (cambio e embreagem) simulada pelo ISAC.
Figura 3.17: Funo de autocovarincia da velocidade e da rotao do motor .
Utilizando a curva de autocovarincia da rotao, a matriz Rn faciluu mente calculada e no singular. Ento, podemos concluir que o ciclo persistentemente excitante. Para identicao do parmetros escolheremos 70% dos dados e os demais 30% sero utilizados para validao, ver gura 3.18.
60
3 Experimento
Figura 3.18: Dados para identicao dos parmetros e para validao .
Canais Medidos Foram medidos os mesmos canais do experimento esttico listadas na tabela 3.7. Para o calculo da correo da medio do uxo de ar foi utilizada a mesma rede neural de funes de base radial regularizada, fcorr (RPM,PREM,), descrita na equao 3.9. Calculando assim, o canal ARCONSCOR. Para calculo da ecincia volumtrica, toma-se como base a equao 2.8
pmam .V R.Tm
v =
Ts 2 1 ) 0,5. atm . Vd . 4 60. RPM Tm .(
mat
(3.16)
onde V igual a 4E3 m3 , R constante dos gases perfeitos e igual a 8,314472 m2 . kg. s2 . K1 . mol1, Vd igual a 399E6 m3 para o motor escolhido, atm a densidade do ar ( 40o C ao nvel do mar) e igual a 1,126 kg/m3 e Ts igual a 313K (40o C).
3.4 Experimento Dinmico A variao da presso do coletor, pmam , foi aproximada como Precoletor t
61
pmam
(3.17)
onde Precoletor a variao da presso em bar do coletor e t o tempo de amostragem. Portanto,
Precoletor .4E3 t
v =
ARCONSCOR
8,314472.Tm
0,5. 1,126. 399E6 . 4
313 1 )2 60. RPM Tm .(
(3.18)
onde ARCONSCOR a medida corrigida do uxo de ar, Tm a temperatura do ar de admisso e RPM a rotao do motor por minuto. A escolha do tempo de amostragem O tempo de amostragem deve ser sucientemente curto para conter caractersticas fundamental do sinal, entretanto, se o intervalo de amostragem for muito curto, a estimao de parmetros poder se tornar mal condicionada. Inicialmente os dados foram superamostrados em uma frequncia de 100Hz. Para a correta escolha da taxa de decimao, , calcula-se as funes de autocovarincia linear e no linear (Aguirre, 2000)
r y () = E[( y(k) y)( y(k ) y)]
(3.19)
r y2 () = E[( y2 (k) y2 )( y2 (k ) y2 )]
(3.20)
sendo que E[.] a esperana matemtica. Considerando o sinal y(k) ergdico, substitui-se a esperana matemtica pela media temporal. Foi usado r y2 (), alm de r y (), para poder detectar correlaes no lineares que porventura estejam nos dados. Aps o calculo das funes, detect-se os mnimos de cada funo, o
62
3 Experimento
menor desses mnimos passar a ser o valor de trabalho, = min[r y ,r y2 ]. m Ento, deve-se escolher de forma que satisfaa: 10 m 20
(3.21)
Para respeitar a equao 3.21, a taxa de decimao, , foi denida em 100, portanto, a frequncia de amostragem foi de 1Hz. A gura 3.19 ilustra as funes de autocovarincia dos sinais de sada aps a decimao.
Figura 3.19: Funes de autocovarincia linear e no linear dos sinais de sada para amostragem de 1Hz . Nota-se que m , para a ecincia volumtrica e para o torque efetivo, em torno de 17, respeitando a condio 3.21. Entretanto, para temperatura do catalisado m r acima de 50. Aceitaremos este no comprimento da condio 3.21 para a temperatura de catalisador com o intuito de trabalharmos com somente uma frequncia de amostragem.
Referncias Bibliogrcas
(2004). PUMA Open V1.3. AVL, Graz - Austria, avl edition. ABB (2011). Thermal mass owmeter fmt700p, sensyow p. DataSheet. ABNT., A. B. D. N. T. ., editor (2004). Norma NBR 6601 Veculos Rodovirios Automotores Leves, Determinao de Hidrocarbonetos, Monxido de Carbono, xidos de Nitrognio, Dixido de Carbono e Material Particulado no Gs de Escapamento. Aguirre, L., Coelho, M., and Corra, M. (2005). On the interpretation and practice of dynamical dierences between hammerstein and wiener models. EE Proc. Control Theory Appl., 152(4). Aguirre, L. A. (2000). Introduo Identicao de sistemas. Editora da UFMG. Bartholomew, C. (2001). Mechanisms of catalyst deactivation. Applied Catalysis A: General, (212):1760. Bartolomais, J. L. (1989). Adeus carburador. Quatro Rodas. Beck, J. and Arnold, K. (1977). Parameter Estimation in Engineering and Science. John Wiley and Sons, New York. Becker, E. and Watson, R. (1998). Future trends in automotive emission control. SAE Technical Paper Series, 980413:1117. Bo-Chiuan, C., Yuh-Yih, W., and Feng-Chi, H. (2010). Estimation of engine rotational dynamics using kalman lter based on a kinematic model. Ieee Transactions On Vehicular Technology, 59(8).
64
REFERNCIAS BIBLIOGRFICAS
Boam, D., Finlay, I., and Martins, J. (1989). A model for predicting engine torque response during rapid throttle transients in port-injected spark ignition engines. SAE, (890565). Brandt, E. P. M. I., Wang, Y., and Grizzle, J. W. m. I. (2000). Dynamic modeling of a three-way catalyst for si engine exhaust emission control. Ieee Transactions On Control Systems Technology, 8(5). Butt, Q. and Bhatti, A. (2008). Estimation of gasoline-engine parameters using higher order sliding mode. IEEE Trans. Ind. Elec, 55(11 3891-3898). Cassidy, J. F., Athans, M., and Lee, W.-H. (1980). Engine controls using linear quadratic control theory. IEEE Truns. Auto, AC-25(5). Cetesb (2011). www.cetesb.sp.gov.br/ar/emissoes/proconve.asp. website. Chen, S., Billings, S. A., Cowan, C. F. N., and Grant, P. M. (1990). Practical identication of narmax models using radial basis functions. International Journal of Control. Cirilo, D., Gontijo, G., and Zoia, R. (2009). Fpt tritec 1.6-1.8 l 16v engines - electrical components specication. Technical report, Fiat Powertrain Tecnologies. Cook, J. and Powell, B. (1987). Discrete simplied external linearization and analytical comparison of ic engine families. Proceedings of the American Control Conference Minneapolis. Cook, J. A. and Powell, B. K. (1988). Modeling of an internal combustion engine for control analysis. IEE Control Systems Magazine. Daniel, H. T. (2006). A consagrao do carro ex. Revista Exame. De Nicolao, G., Scattolini, R., and Siviero, C. (1996). Modelling the volumetric eciency of ic engines: Parametric, non-parametric and neural techniques. Pergamon, 4(10):14051415. Fruzzetti, K.P. end Palazoglu, A. and McDonald, K. (1997). Nonlinear model predictive control using hammerstein models. J. Proc. Cont., 7(1). Givens, L. (1976). Cadillacs electronic fuel injection. Automotive Engineering, 84(2):1823.
REFERNCIAS BIBLIOGRFICAS
65
Hastie, T. and Tibshirani, R. (1990). Generalized Additive Models. Chapman and Hall, London. Hazell, P. A. and Flower, J. O. (1971a). Modeling of spark ignition engines for control purposes. Int. J. Contr., 13(4). Hazell, P. A. and Flower, J. O. (1971b). Sampled data theory applied to the modeling and control analysis of compression ignition engines-part i. Int. J. Contr., 13(3):549562. Hendricks, E. and Sorenson, S. (1990). Mean value modelling of spark ignition engines. SAE, (900616). Hentz, N., Mews, M., Stier, G., Beaumont, A. J., and Noble, A. D. (2001). An approach to torque-based engine management system. SAE Warrendale PA, 2001-01-026. Heywood, J. (1988). Internal Combustion Engine Fundamentals. McGraw-Hill Book Company. horiba (2011). http://www.horiba.com. website. Jongeneel, J., Nijmeijer, H., Manzie, C., and Nesic, D. (2009). Input redundant internal combustion engine with linear quadratic gaussian control and dynamic control allocation. Internal Report. Kamei, E., Namba, H., Osaka, K., and Ohba, M. (1987). Application of reduced order model to automotive engine control system. ASME J. Dyn. Syst. Meas. Contr., 109:232237. Li, J.-D. (2006). Dynamic response of constant temperature hot-wire systems under various perturbations. Institute Of Physics Publishing Measurement Science And Technology, 17. Li, J.-D. (2007). Hot-wire attenuation and its correction in turbulence measurements. Australasian Fluid Mechanics Conference. M., N. and G., D. N. (2007). Active learning strategies for the neural estimation of engine maps. Ed. New York: Nova Publishers. MacKay, D. (1992). Bayesian interpolation. Neural Computation, 4.
66
REFERNCIAS BIBLIOGRFICAS
Martin, M. (2009). Volumetric eciency and pumping torque estimation and compressor recirculation control of turbocharged engines. SAE World Congress e Exhibition - Detroit, (2009-01-0587). Matthews, R., Dongre, S., and Beaman, J. (1991). Intake and ecm submodel improvements for dynamic si engine models: Examination of tip-in/tipout. SAE, (910074). Mencik, Z. and Blumberg, P. N. (1978). Representation of engine data by multi-variate least-squares regression. SAE Paper, (780288). Moskwa, J. and Hedrick, J. (1992). Modeling and validation of automotive engines for control algorithm development. ASME Journal of Dynamic Systems, Measurement, and Control, 114:278285. Moskwa, J. and J.K., H. (1987). Automotive engine modeling for real time control application. Proceedings of the 1987 American Control Conference. Nascimento, R. P. and Segre, L. M. (2006). Competitividade no setor automobilstico: Um modelo de anlise da exibilidade no brasil. Revista Gesto Industrial. Neve, M., De Nicolao, G., Prodi, G., and Siviero, C. (2009). Estimation of engine maps: A regularized basis-function networks approach. Ieee Transactions On Control Systems Technology, 17. Passarini, L. C. (1993). Projeto E Anlise De Vlvulas Eletromagnticas Injetoras De Combustvel: Uma Nova Proposta. Tese doutorado, USP So Carlos, So Carlos. Poggio, T. and Girosi, F. (1990). Networks for approximation and learning. IEEE, 78(9). Powell, B., Cook, J., and Grizzle, J. (1987). Modelling and analysis of an inherently multi-rate sampling fuel injected engine idle speed control loop. J. of Dyn. Syst., 109:405410. Powell, B. and Cook, J. A. (1987). Nonlinear low frequency phenomenological engine modeling and analysis. roceedings of the American Control Conference Minneapolis.
REFERNCIAS BIBLIOGRFICAS
67
Qadeer, A. and Aamer, I. B. (2010). Second order sliding mode observer for estimation of si engine. International Workshop On Variable Structure Systems. Rask, E. and Sellnau, M. (2004). Simulation bases engine calibration: Tools, techniques and applications. SAE World Congress. Siviero, C., Scattolini, R., Gelmetti, A., Poggio, L., and Serra, G. (1995). Analysis e validation of mean value models for si ic-engines. Proc. of First IFAC-Workshop on Advances in Automotive Control. Soderstrom, T. and Stoica, P. (1989). System identication. Prentice Hall, Cambridge. Sunz, J., Kolmanovsky, I., Cook, J. A., and Buckland, J. H. (2005). Modeling and control of automotive powertrain systems: A tutorial. American Control Conference. Yurkovich, S. and Simpson, M. (1997). Crank-angle domain modeling and control for idle speed. SAE Paper, (970027).
Vous aimerez peut-être aussi
- Bloqueios Carros & CaminhõesDocument31 pagesBloqueios Carros & CaminhõesIVÃPas encore d'évaluation
- Top 21 Hiperesportivos: Os carros mais belos e velozes do mundoD'EverandTop 21 Hiperesportivos: Os carros mais belos e velozes do mundoPas encore d'évaluation
- FIAARGOMP02 - Argo 1 - 8 (Parte 1) - Procedimentos de Reparo MotorDocument22 pagesFIAARGOMP02 - Argo 1 - 8 (Parte 1) - Procedimentos de Reparo MotorCleimar José Kehl100% (3)
- 05 - Motor EA888 3 GeraçãoDocument62 pages05 - Motor EA888 3 GeraçãoPatrick Dos Santos Rodrigues Miranda100% (1)
- Manual de Proprietários, Motoristas e Chofer: THE POETRY OF THE END OF THE WORLD, מסכת מכות, Chaves de Tetuan, by Mois BenarrochD'EverandManual de Proprietários, Motoristas e Chofer: THE POETRY OF THE END OF THE WORLD, מסכת מכות, Chaves de Tetuan, by Mois BenarrochPas encore d'évaluation
- CVT Service Manual GWM PDF Free - En.pt PDFDocument95 pagesCVT Service Manual GWM PDF Free - En.pt PDFRenanPas encore d'évaluation
- HondaFit MotorDocument18 pagesHondaFit MotormarlonmsilvaPas encore d'évaluation
- Montagem e desmontagem do motor Zetec 1.6Document156 pagesMontagem e desmontagem do motor Zetec 1.6Rodrigo HirschmannPas encore d'évaluation
- Catalogo Juntas GenuiniDocument48 pagesCatalogo Juntas GenuiniChacalDcPas encore d'évaluation
- Motor 2.0L Zetec Focus Manual de ReparaçãoDocument154 pagesMotor 2.0L Zetec Focus Manual de ReparaçãoJean Tiepo100% (2)
- Fiat GM Power Train 1.8L - 8VDocument2 pagesFiat GM Power Train 1.8L - 8Vronyounico100% (2)
- Aplicação de injetores para veículosDocument8 pagesAplicação de injetores para veículosEverton FuzaroPas encore d'évaluation
- Interruptor de vidros FIT 2004-2008Document17 pagesInterruptor de vidros FIT 2004-2008Jayme JuniorPas encore d'évaluation
- Garantia e Controle de QualidadeDocument14 pagesGarantia e Controle de QualidadeRomulo CeleriPas encore d'évaluation
- Eixo traseiro Ranger 98Document75 pagesEixo traseiro Ranger 98Ogre Da SelvaPas encore d'évaluation
- Manual técnico de correias dentadas ContinentalDocument56 pagesManual técnico de correias dentadas ContinentalJoselino França de Melo100% (2)
- AEA - 30 anos: a Associação Brasileira de Engenharia Automotiva e sua históriaD'EverandAEA - 30 anos: a Associação Brasileira de Engenharia Automotiva e sua históriaPas encore d'évaluation
- Transmissão AutomáticaDocument32 pagesTransmissão Automáticaadilson antonio severgniniPas encore d'évaluation
- Motor 1.2 FireDocument4 pagesMotor 1.2 Firewesley candidoPas encore d'évaluation
- Manutenção Do H34 - Passo A PassoDocument45 pagesManutenção Do H34 - Passo A PassoFelipeAndréiaPas encore d'évaluation
- Catálogo de produtos TuperDocument354 pagesCatálogo de produtos TuperJosé ViníciusPas encore d'évaluation
- VermiculitaDocument4 pagesVermiculitaJoão DantasPas encore d'évaluation
- ABR Catalogo VWDocument46 pagesABR Catalogo VWArtur ValPas encore d'évaluation
- Catálogos Ac DelcoDocument199 pagesCatálogos Ac DelcoDaniel Junior100% (2)
- Identificar Opala Caravan ChassiDocument5 pagesIdentificar Opala Caravan ChassiricardoleopoldinoPas encore d'évaluation
- Audi A3 Tfsi Dados TécnicosDocument7 pagesAudi A3 Tfsi Dados TécnicosEderson AmaroPas encore d'évaluation
- Tabela ModulosDocument24 pagesTabela ModulosWagner YoshidaPas encore d'évaluation
- Mot or AP 1.6/1.8/2. 0 8 Vá LV Ul AsDocument3 pagesMot or AP 1.6/1.8/2. 0 8 Vá LV Ul AsMárcioPas encore d'évaluation
- Suspensão dianteira ferramentasDocument709 pagesSuspensão dianteira ferramentasgiraiadoinferno100% (1)
- Catalogo PlanatacDocument78 pagesCatalogo PlanatacJaumsselPas encore d'évaluation
- Projetos Com Esp32 Programado Em Arduino - Parte ViiiD'EverandProjetos Com Esp32 Programado Em Arduino - Parte ViiiPas encore d'évaluation
- Desmontagem Do Motor EconoFlexDocument12 pagesDesmontagem Do Motor EconoFlexpassarimPas encore d'évaluation
- Engines Pentastar - Reparos e ManutençãoDocument3 pagesEngines Pentastar - Reparos e Manutençãolyndor100% (2)
- Aj - Troca de Óleo - Tabela de LitrosDocument3 pagesAj - Troca de Óleo - Tabela de LitrosDanilo SouzaPas encore d'évaluation
- Comando cobertura montagem visão geralDocument5 pagesComando cobertura montagem visão geralcrisprusch1gmailcomPas encore d'évaluation
- Corolla Ate 2001Document6 pagesCorolla Ate 2001AndersonPas encore d'évaluation
- Power Engine Catalogo Aneis de Pistoes em PDFDocument52 pagesPower Engine Catalogo Aneis de Pistoes em PDFLEODECIO BELO DE OLIVEIRA0% (1)
- Detecção de descontinuidades em soldas e processos de fabricaçãoDocument3 pagesDetecção de descontinuidades em soldas e processos de fabricaçãoWilker Frazao100% (1)
- Portfólio de serviços de engenharia e consultoriaDocument16 pagesPortfólio de serviços de engenharia e consultoriaMárcio MontenegroPas encore d'évaluation
- Catálogo de eixos de comando de válvulas IndecoDocument1 pageCatálogo de eixos de comando de válvulas IndecoCAIOELEUTERIOCEOPas encore d'évaluation
- Explorer 4.0 Esq. EletDocument1 pageExplorer 4.0 Esq. EletwaggcasPas encore d'évaluation
- L200 Triton Outdoor GLS Ficha TecnicaDocument2 pagesL200 Triton Outdoor GLS Ficha TecnicaAriel GomesPas encore d'évaluation
- Transm - ren.JH3 TampaDocument10 pagesTransm - ren.JH3 TampaMelsi MaranPas encore d'évaluation
- Afinação de Weber IDFDocument9 pagesAfinação de Weber IDFClaudio MendesPas encore d'évaluation
- Turismo Nacional Regulamento TecnicoDocument43 pagesTurismo Nacional Regulamento TecnicoHudson Bruno100% (1)
- Manual - 1988Document102 pagesManual - 1988arriegua1100% (1)
- Ficha Tecnica Kombi 1.4Document2 pagesFicha Tecnica Kombi 1.4Glaucon PiresPas encore d'évaluation
- NR 14 - Análise Dos Riscos e Medidas de Segurança em Fornos de AtmosferaDocument17 pagesNR 14 - Análise Dos Riscos e Medidas de Segurança em Fornos de AtmosferaCPSSTPas encore d'évaluation
- Abr 2015 PDFDocument217 pagesAbr 2015 PDFscrollock0428100% (1)
- 14 Torque de Aperto Motores EW10J4Document4 pages14 Torque de Aperto Motores EW10J4Joao JJPas encore d'évaluation
- ESCORT ZETEC 213CVDocument3 pagesESCORT ZETEC 213CVandre d.Pas encore d'évaluation
- Diagrama Elétrico SpeeduinoDocument2 pagesDiagrama Elétrico SpeeduinoBinotto PerformancePas encore d'évaluation
- Contemporary Translation Theories: 2nd Revised Edition, by Edwin Gentzler. Clevedon: Multilingual Matters, 2001.Document4 pagesContemporary Translation Theories: 2nd Revised Edition, by Edwin Gentzler. Clevedon: Multilingual Matters, 2001.Vigvald NTPas encore d'évaluation
- Catalogo Sampel PDFDocument227 pagesCatalogo Sampel PDFFERNANDO DI LAUROPas encore d'évaluation
- Toyota PDFDocument5 pagesToyota PDFyago18Pas encore d'évaluation
- Gerada em 22/11/2022 11:04:54: GRRF - Guia de Recolhimento Rescisório Do FGTSDocument1 pageGerada em 22/11/2022 11:04:54: GRRF - Guia de Recolhimento Rescisório Do FGTSProfessora Andreia Marqueto100% (1)
- Cat Bicos InjetoresDocument12 pagesCat Bicos InjetoresrodrigomelorqmPas encore d'évaluation
- Chevette: especificações técnicas de motoresDocument3 pagesChevette: especificações técnicas de motoresCelsoPas encore d'évaluation
- Tabelas de torque para motor Fiat Fire 1.0Document1 pageTabelas de torque para motor Fiat Fire 1.0DaniloPas encore d'évaluation
- Diagnóstico de PistõesDocument7 pagesDiagnóstico de PistõesFabio GabinoPas encore d'évaluation
- Chevrolet Space Van Catalogo Pecas PDFDocument218 pagesChevrolet Space Van Catalogo Pecas PDFEverton FuzaroPas encore d'évaluation
- Instalação universal de alarme de veículoDocument4 pagesInstalação universal de alarme de veículoGilmar SantosPas encore d'évaluation
- Hastings - Anel PistaoDocument40 pagesHastings - Anel Pistaorivoltaleandro100% (3)
- Catálogo Nakata - Tabela de Presão para Bomba de ÓleoDocument3 pagesCatálogo Nakata - Tabela de Presão para Bomba de ÓleoGustavo KajiyaPas encore d'évaluation
- Testar Motor de ArranqueDocument4 pagesTestar Motor de ArranquejairdailhaPas encore d'évaluation
- Motor Marea Turbo completo com acessóriosDocument2 pagesMotor Marea Turbo completo com acessórioswencellcPas encore d'évaluation
- Cuidados para prolongar a vida útil do seu ar-condicionadoDocument3 pagesCuidados para prolongar a vida útil do seu ar-condicionadoEwerton Rodrigues Alves0% (1)
- Controlador FE50RP: manual de operação otimizado paraDocument8 pagesControlador FE50RP: manual de operação otimizado paraFernando CarvalhoPas encore d'évaluation
- Recibo de pagamentoDocument1 pageRecibo de pagamentoWalter CostaPas encore d'évaluation
- Apostila AutoCAD 2008Document99 pagesApostila AutoCAD 2008Augusto Carlos CostaPas encore d'évaluation
- Fiat Marea Weekend orçamentoDocument1 pageFiat Marea Weekend orçamentoTruckPartsPas encore d'évaluation
- Curso Operador Produção Sistemas Flare VentDocument24 pagesCurso Operador Produção Sistemas Flare Ventrodrigo cezarPas encore d'évaluation
- Manual do Leiaute do PGDAS-D e DASDocument25 pagesManual do Leiaute do PGDAS-D e DASEsteves LimaPas encore d'évaluation
- Grupo 5T-Trabalho Ciclo CombinadoDocument15 pagesGrupo 5T-Trabalho Ciclo Combinadohugod1982Pas encore d'évaluation
- COBRA NC 400 B (Sistema de Refrig Com Válvula Termost) - PTDocument34 pagesCOBRA NC 400 B (Sistema de Refrig Com Válvula Termost) - PTDannillo ParreiraPas encore d'évaluation
- Guia inspeção sistemas ar condicionadoDocument8 pagesGuia inspeção sistemas ar condicionadoWilliam SantosPas encore d'évaluation
- Introdução A IHCDocument26 pagesIntrodução A IHCSidney MoreiraPas encore d'évaluation
- EDITAL - Especificação Técnica SICOOB Versão6 - 20-03-2014 PDFDocument23 pagesEDITAL - Especificação Técnica SICOOB Versão6 - 20-03-2014 PDFRichard Albert SilvaPas encore d'évaluation
- TV 2Document24 pagesTV 2Dionei CardozoPas encore d'évaluation
- Catálogo implantes e componentes odontológicosDocument8 pagesCatálogo implantes e componentes odontológicosClaudio Britto0% (2)
- Formulário de segurança contra incêndio para baixo riscoDocument1 pageFormulário de segurança contra incêndio para baixo riscodiegomoitaPas encore d'évaluation
- Perfis metálicos para estrutura de telhadoDocument1 pagePerfis metálicos para estrutura de telhadoLeonardo MendonçaPas encore d'évaluation
- Calculando Medidas-PneusDocument3 pagesCalculando Medidas-PneusPHRFragosoPas encore d'évaluation
- SMASH THE CAKE - OrçamentoDocument9 pagesSMASH THE CAKE - OrçamentoRafael Leandro de SouzaPas encore d'évaluation
- Mecanismo de Ruptura de Pavimentos FlexíveisDocument54 pagesMecanismo de Ruptura de Pavimentos Flexíveissparcusart-1100% (1)
- Filtros ativos PBDocument10 pagesFiltros ativos PBNátali SchmidtPas encore d'évaluation
- Data Schit RELÉ MKB - 3 L RoHS.Document3 pagesData Schit RELÉ MKB - 3 L RoHS.Otavio CastroPas encore d'évaluation