Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Attachment - Line SizingDocument25 pagesAttachment - Line Sizingfebriyan.saputraPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Flow Analyses Inside Jet Pumps Used For Oil WellsDocument11 pagesFlow Analyses Inside Jet Pumps Used For Oil WellsAamir SultanPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- SettlingDocument5 pagesSettlingAduchelab AdamsonuniversityPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Chapter 2 - FrankWhiteDocument27 pagesChapter 2 - FrankWhiteFreddy Moya SaavedraPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Convection SummaryDocument10 pagesConvection SummarycacafaruqPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Openprop: An Open-Source Parametric Design and Analysis Tool For PropellersDocument8 pagesOpenprop: An Open-Source Parametric Design and Analysis Tool For PropellersAbhishek AroraPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Pipe Sizing and Pressure Drop CalculationsDocument14 pagesPipe Sizing and Pressure Drop Calculationsreach_arindomPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Fm-II Quiz 1 19-20 - Section1 - Set1Document2 pagesFm-II Quiz 1 19-20 - Section1 - Set1nivedithashetty0123Pas encore d'évaluation
- Supercritical Airfoils With FluentDocument10 pagesSupercritical Airfoils With FluentErnesto Padilla MarquezPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Department of Civil Engineering and Applied Mechanics Mcgill University Cive327 Fluid Mechanics and Hydraulics Assignment No. 5Document7 pagesDepartment of Civil Engineering and Applied Mechanics Mcgill University Cive327 Fluid Mechanics and Hydraulics Assignment No. 5Hajar BaarabePas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Wind Tunnel - T128Document2 pagesWind Tunnel - T128zoranmiskovicPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- MEC 353 Fluid Mechanics: Lecture NotesDocument470 pagesMEC 353 Fluid Mechanics: Lecture NotesbaderPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Input Output: Form 3 - Function TestDocument52 pagesInput Output: Form 3 - Function TestIsaalexPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Course Content NAME 213 FMDocument3 pagesCourse Content NAME 213 FMA'raf Bin Islam SwapnilPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Designing and Testing of TurboexpanderDocument44 pagesDesigning and Testing of Turboexpanderankur2061Pas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- TF06 Convection 03Document2 pagesTF06 Convection 03thekrumpPas encore d'évaluation
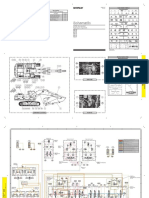
- 325D Excavator Hydraulic System: Fluid Power SymbolsDocument2 pages325D Excavator Hydraulic System: Fluid Power SymbolsDennis Olaya100% (3)
- Perhitungan Mass Velocity Dan UcDocument7 pagesPerhitungan Mass Velocity Dan UcElan Patria NusadiPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- 3/2 AH-WRT™ - Horizontal Pump: InstallationDocument3 pages3/2 AH-WRT™ - Horizontal Pump: InstallationGuiver Santisteban IbañezPas encore d'évaluation
- HMT Module4 FlowGovEqns PDFDocument40 pagesHMT Module4 FlowGovEqns PDFRichi KothariPas encore d'évaluation
- Reynolds Analogy Pandtl and Chilton Coulbourn AnalogyDocument5 pagesReynolds Analogy Pandtl and Chilton Coulbourn Analogykartik521Pas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Questions Fluid MechanicsDocument1 pageQuestions Fluid MechanicsHeart-HackerPas encore d'évaluation
- Applied Thermal Engineering: Chaitanya Vashistha, Anil Kumar Patil, Manoj KumarDocument13 pagesApplied Thermal Engineering: Chaitanya Vashistha, Anil Kumar Patil, Manoj KumarTejal BanmarePas encore d'évaluation
- Heat Exchanger RatingDocument20 pagesHeat Exchanger RatingFareeha HasanPas encore d'évaluation
- l90ls Spare PartsDocument36 pagesl90ls Spare Partsbrunosamaeian100% (2)
- Fundamentals of Final Control ElementsDocument57 pagesFundamentals of Final Control ElementshazemPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Flow Across Tube BanksDocument11 pagesFlow Across Tube BanksAliAlMaestroPas encore d'évaluation
- Chapter 8 PDFDocument51 pagesChapter 8 PDFSalmanPas encore d'évaluation
- CheGuide Beggs & Brill MethodDocument6 pagesCheGuide Beggs & Brill MethodchenguofuPas encore d'évaluation
- Aerodynamic Evaluation On Formula SAE VehiclesDocument9 pagesAerodynamic Evaluation On Formula SAE Vehiclesmikael bezerra cotias dos santosPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)