Vous aimerez peut-être aussi
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Lista Distribuidor: PBX: 255 4210 / 290 8202 FAX: 2540 746Document4 pagesLista Distribuidor: PBX: 255 4210 / 290 8202 FAX: 2540 746rolandocochaPas encore d'évaluation
- Department of IT:: VRSEC Report On Naipunya VikasamDocument2 pagesDepartment of IT:: VRSEC Report On Naipunya VikasamJaya VakapalliPas encore d'évaluation
- Coa Unit 4 NotesDocument45 pagesCoa Unit 4 Notessidharthsharma463100% (1)
- System Call and Its TypeDocument4 pagesSystem Call and Its Typesanya gargPas encore d'évaluation
- Lenovo Ideapad L340 15IWL SpecDocument1 pageLenovo Ideapad L340 15IWL SpecTimuçinPas encore d'évaluation
- Evolution of Cloud ComputingDocument20 pagesEvolution of Cloud ComputingPonHarshavardhananPas encore d'évaluation
- Wincor Nixdorf ConfigProgManual - EnglishDocument7 pagesWincor Nixdorf ConfigProgManual - Englishalfi56kPas encore d'évaluation
- Lenovo ThinkPad T430 DatasheetDocument4 pagesLenovo ThinkPad T430 DatasheetKathleen AquinoPas encore d'évaluation
- Os 12Document25 pagesOs 12Mihir KumarPas encore d'évaluation
- HP Product Warranty Results Victus by HP 16.1 Inch Gaming Laptop PC 16-E0000 (2V8Z6AV) - HP® Customer SupportDocument3 pagesHP Product Warranty Results Victus by HP 16.1 Inch Gaming Laptop PC 16-E0000 (2V8Z6AV) - HP® Customer Supportkyubi xxxPas encore d'évaluation
- P75247ea F5U502 F5U503Document112 pagesP75247ea F5U502 F5U503Fabian PerezPas encore d'évaluation
- Lesson Plan in Tle Computer Hardware and Servicing Grade 8 PDF FreeDocument8 pagesLesson Plan in Tle Computer Hardware and Servicing Grade 8 PDF FreeArnel Bulalhog DingalPas encore d'évaluation
- Peripheral Devices in ComputerDocument17 pagesPeripheral Devices in ComputerRp Singh0% (1)
- Proposal EquipmentDocument4 pagesProposal EquipmentFe BalajadiaPas encore d'évaluation
- Smart Board TutorialDocument16 pagesSmart Board TutorialRodion CiupercaPas encore d'évaluation
- GameDocument622 pagesGameAndo Bayu C. HutapeaPas encore d'évaluation
- Inventory RegistrarDocument3 pagesInventory Registrarrap leePas encore d'évaluation
- Acer Travelmate 5310 5710 5710g Extensa 5210 5610 Wistron Dellen Rev Sa SCHDocument43 pagesAcer Travelmate 5310 5710 5710g Extensa 5210 5610 Wistron Dellen Rev Sa SCHЕвгений АвазачемPas encore d'évaluation
- Pic 18Document78 pagesPic 18anses1000Pas encore d'évaluation
- Using The Catalina Loader On An ImacDocument14 pagesUsing The Catalina Loader On An Imacman_ariefPas encore d'évaluation
- Intel Core I7 PDFDocument73 pagesIntel Core I7 PDFReal MastercraFTPas encore d'évaluation
- Activity No 2 RegistersDocument9 pagesActivity No 2 RegistersMark Daniel RuizPas encore d'évaluation
- Fanuc DNC OperationDocument9 pagesFanuc DNC OperationJoao HerreraPas encore d'évaluation
- Register Transfer Language IntroductionDocument12 pagesRegister Transfer Language IntroductionDaniel RizviPas encore d'évaluation
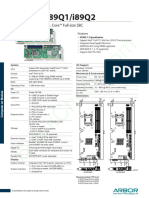
- Arbor Hicore I89q1 I89q2Document2 pagesArbor Hicore I89q1 I89q2Waleed MareePas encore d'évaluation
- Basic Computer Hausa EditionDocument43 pagesBasic Computer Hausa EditionAlbadar PoultryPas encore d'évaluation
- JN51xx Flash Programmer - Userguide PDFDocument35 pagesJN51xx Flash Programmer - Userguide PDFPri478Pas encore d'évaluation
- LESSON 6 - Parts and Function (Hard Disk Drive)Document58 pagesLESSON 6 - Parts and Function (Hard Disk Drive)Gerry Jr. GohilPas encore d'évaluation
- How To Connect To A Wireless Display in Windows 10Document4 pagesHow To Connect To A Wireless Display in Windows 10juanPas encore d'évaluation