Vous aimerez peut-être aussi
- Data Structures in CDocument47 pagesData Structures in CRaghavendiran J M93% (15)
- Writing Device DriversDocument24 pagesWriting Device DriversmohitguptaPas encore d'évaluation
- Instruction Manual: SLM SeriesDocument122 pagesInstruction Manual: SLM Seriesalex lzgPas encore d'évaluation
- 8 Bit Risc Processor PresentationDocument36 pages8 Bit Risc Processor PresentationSantanu KumarPas encore d'évaluation
- W1209Document6 pagesW1209priya100% (2)
- Huawei LTE Wireless Parameter AuditDocument64 pagesHuawei LTE Wireless Parameter AuditMuhammad UsmanPas encore d'évaluation
- Webpower: User GuideDocument82 pagesWebpower: User GuideSérgio CostaPas encore d'évaluation
- XWEB300D/500D/500 EVO: Installation ManualDocument22 pagesXWEB300D/500D/500 EVO: Installation ManualHoàngViệtAnhPas encore d'évaluation
- (GOOD) SPI CommunicationsDocument17 pages(GOOD) SPI CommunicationsDuy Quang Nguyễn100% (1)
- ZTE LTE FDD Carrier Aggregation Feature GuideDocument154 pagesZTE LTE FDD Carrier Aggregation Feature GuideOrlando Medina100% (2)
- XW60K GBDocument6 pagesXW60K GBsdsdPas encore d'évaluation
- DSP Lab Manual 15-11-2016 PDFDocument73 pagesDSP Lab Manual 15-11-2016 PDFsmdeepajpPas encore d'évaluation
- Te2000 TC3 Hmi enDocument2 652 pagesTe2000 TC3 Hmi enJosé Francisco MiguelPas encore d'évaluation
- Easy8051 v6 Development System USB ProgrammerDocument4 pagesEasy8051 v6 Development System USB ProgrammerShobhit SinghPas encore d'évaluation
- RTS Noise Impact in CMOS Image Sensors Readout CircuitDocument5 pagesRTS Noise Impact in CMOS Image Sensors Readout CircuiturpublicPas encore d'évaluation
- HT Webserver en 150720Document21 pagesHT Webserver en 150720Mihai IavorschiPas encore d'évaluation
- Lessons Learnt from Project Report on Verilog Model CheckingDocument3 pagesLessons Learnt from Project Report on Verilog Model CheckingVinit PatelPas encore d'évaluation
- DSP Lab 5 HandoutDocument14 pagesDSP Lab 5 Handoutusama anwerPas encore d'évaluation
- s71500 Pid Control Function Manual en-US en-US PDFDocument618 pagess71500 Pid Control Function Manual en-US en-US PDFThiago WerneckPas encore d'évaluation
- Programming Fundamentals (EE-170L) Lab ManualDocument63 pagesProgramming Fundamentals (EE-170L) Lab ManualAqsa AyeshaPas encore d'évaluation
- Visual Programming Lab ManualDocument229 pagesVisual Programming Lab ManualBetsy Freda50% (4)
- Ex No: Introduction To DSP & DSK (Tms320C6711) DateDocument9 pagesEx No: Introduction To DSP & DSK (Tms320C6711) DateParthaSarathyPas encore d'évaluation
- Lab Manual DSP (2020)Document68 pagesLab Manual DSP (2020)Ch UsamaPas encore d'évaluation
- DSP CasestudyDocument23 pagesDSP CasestudyShayani BatabyalPas encore d'évaluation
- Lab 1 SlidesDocument28 pagesLab 1 SlidesJosé CastilloPas encore d'évaluation
- Introduction To TMS320C6713 DSP Starter Kit DSK)Document18 pagesIntroduction To TMS320C6713 DSP Starter Kit DSK)Anup DharanguttiPas encore d'évaluation
- 6713 User ManualDocument92 pages6713 User Manualsningle100% (1)
- Programming Tms320c6713 Report by PRATEEKDocument14 pagesProgramming Tms320c6713 Report by PRATEEKPrateek Raj Gautam100% (1)
- Xweb Evo V 5 3 0 Opr enDocument112 pagesXweb Evo V 5 3 0 Opr enHoàngViệtAnhPas encore d'évaluation
- Interfacing The PC Serial Port RS232Document40 pagesInterfacing The PC Serial Port RS232Sneetsher Crispy100% (16)
- WIM Controller SPP GuideDocument7 pagesWIM Controller SPP GuideJosé Sánchez BPas encore d'évaluation
- Sensor Linea Type 9195G PDFDocument2 pagesSensor Linea Type 9195G PDFAnonymous lx0DDKPas encore d'évaluation
- Using Using Using Using Using Using Namespace: "Calibri"Document6 pagesUsing Using Using Using Using Using Namespace: "Calibri"Diego Cruz AlvarezPas encore d'évaluation
- TCP Client ServerDocument3 pagesTCP Client ServerKalegzer SisayPas encore d'évaluation
- Programa C# DSPDocument4 pagesPrograma C# DSPOmar CirineoPas encore d'évaluation
- RiceLake 920iUSB ProgrammingmanualDocument108 pagesRiceLake 920iUSB ProgrammingmanualAlianza DiagoPas encore d'évaluation
- How To Use Dev-C++Document7 pagesHow To Use Dev-C++QaiserPas encore d'évaluation
- 720i Rice LakeDocument123 pages720i Rice LakeJose Luis ToledoPas encore d'évaluation
- Manual Irite 1Document10 pagesManual Irite 1Mauricio Alejandro Corvalan Yañez0% (1)
- Ethernet Communication Protocol PDFDocument2 pagesEthernet Communication Protocol PDFDanielaPas encore d'évaluation
- Porttalk Installation StepsDocument2 pagesPorttalk Installation StepsMuhammad Zulkifly SamatPas encore d'évaluation
- Guide Studio5 User KicDocument25 pagesGuide Studio5 User KicJose Moreno100% (1)
- Build an ICSP programmer for small PIC microcontrollersDocument14 pagesBuild an ICSP programmer for small PIC microcontrollersJOYCE100% (1)
- Xilinx ISE VHDL Simulation Tutorial GuideDocument38 pagesXilinx ISE VHDL Simulation Tutorial GuideReesePas encore d'évaluation
- DSP Lab With Ti c6x DSP and c6713 DSK 6.3Document116 pagesDSP Lab With Ti c6x DSP and c6713 DSK 6.3Twinkle RatnaPas encore d'évaluation
- SYS600 Application DesignDocument488 pagesSYS600 Application DesignHai Pham MinhPas encore d'évaluation
- Programming Win32 With Gnu C and CDocument261 pagesProgramming Win32 With Gnu C and Cgreatf000100% (1)
- Tinaware LaunchpadDocument11 pagesTinaware Launchpadryan cooper100% (1)
- GCC Profile Guided OptimizationDocument47 pagesGCC Profile Guided OptimizationTuxology.netPas encore d'évaluation
- Ethernet Module ENC28J60 Arduino PDFDocument5 pagesEthernet Module ENC28J60 Arduino PDFArdian Ramadita SugaraPas encore d'évaluation
- FireDAC-First AppDocument2 pagesFireDAC-First AppSinisa NenkovPas encore d'évaluation
- Computer Laboratory Manual: Fundamental of ICT Lab ManualDocument133 pagesComputer Laboratory Manual: Fundamental of ICT Lab Manualanon_510855877Pas encore d'évaluation
- Microprocessors and Interfacing Lab ExperimentsDocument54 pagesMicroprocessors and Interfacing Lab Experimentssateesh180siri0% (2)
- Void PPC UpdateDocument41 pagesVoid PPC UpdatePian RispianPas encore d'évaluation
- D.S.P/MATLAB Theory & ExperimentsDocument57 pagesD.S.P/MATLAB Theory & ExperimentsNandagopal Sivakumar50% (4)
- DSP LAB INTRO: GENERATING SINE WAVESDocument25 pagesDSP LAB INTRO: GENERATING SINE WAVESNagaraju NeelaPas encore d'évaluation
- Real-Time DSP Laboratory1:: An Introduction To The TMS320C6713 DSKDocument20 pagesReal-Time DSP Laboratory1:: An Introduction To The TMS320C6713 DSKNeha PankiPas encore d'évaluation
- c6713 DSP LabDocument58 pagesc6713 DSP LabdangvuduongPas encore d'évaluation
- Lab 7 DSPBEE13Document17 pagesLab 7 DSPBEE13Ahmed Razi UllahPas encore d'évaluation
- Software Details: For The Designing and Development of The Project We Use Different Types of Software's. They AreDocument15 pagesSoftware Details: For The Designing and Development of The Project We Use Different Types of Software's. They AreratheeshbrPas encore d'évaluation
- Project2 PsocDocument10 pagesProject2 PsocKarthik V KalyaniPas encore d'évaluation
- TMS320C6713 DSP Starter Kit (DSK) : Product InformationDocument2 pagesTMS320C6713 DSP Starter Kit (DSK) : Product InformationrofiPas encore d'évaluation
- Digital Signal Processing and Applications With The TMS320C6713 DSKDocument63 pagesDigital Signal Processing and Applications With The TMS320C6713 DSKliametaPas encore d'évaluation
- Matlab 6713Document15 pagesMatlab 6713ameiyappan5697Pas encore d'évaluation
- 10 1 1 141Document12 pages10 1 1 141Sai SaranyaPas encore d'évaluation
- New Microsoft Office PowerPoint PresentationDocument1 pageNew Microsoft Office PowerPoint PresentationSai SaranyaPas encore d'évaluation
- A Mini Project Report On Bachelor of Technology IN Submitted byDocument16 pagesA Mini Project Report On Bachelor of Technology IN Submitted bySai SaranyaPas encore d'évaluation
- New Microsoft Office PowerPoint PresentationDocument1 pageNew Microsoft Office PowerPoint PresentationSai SaranyaPas encore d'évaluation
- Basic Logic DesignDocument22 pagesBasic Logic DesignDanang Prasetyo UtomoPas encore d'évaluation
- Why Wi-Fi?: Al Prendergast IT Director LV-CCLD August 12,2004Document32 pagesWhy Wi-Fi?: Al Prendergast IT Director LV-CCLD August 12,2004anon-412503Pas encore d'évaluation
- Unit-1 JavaDocument3 pagesUnit-1 JavaSai SaranyaPas encore d'évaluation
- BLUE EYES TECHNOLOGY - AbstractDocument4 pagesBLUE EYES TECHNOLOGY - AbstracttechnoverPas encore d'évaluation
- Inam BEET 4833 CHP1-a-INTRODUCTION AND FINDAMENTALS OF ANTENNADocument25 pagesInam BEET 4833 CHP1-a-INTRODUCTION AND FINDAMENTALS OF ANTENNAKishen KunalanPas encore d'évaluation
- Hornresp ManaualDocument161 pagesHornresp Manaualsakura 835Pas encore d'évaluation
- Mobile NVR Series Users Manual V1 - 0 - 1 PDFDocument184 pagesMobile NVR Series Users Manual V1 - 0 - 1 PDFNguyễn NinhPas encore d'évaluation
- Solar Powered Grass Cutter and Pesticide Spreading RobotDocument4 pagesSolar Powered Grass Cutter and Pesticide Spreading RobotNeha SurwasePas encore d'évaluation
- HPE 3PAR StoreServ 8000 Site Planning PDFDocument68 pagesHPE 3PAR StoreServ 8000 Site Planning PDFBas VolkswagenPas encore d'évaluation
- EMI Suppression Filters Data SheetDocument2 pagesEMI Suppression Filters Data SheetSergio OteizaPas encore d'évaluation
- MC33385 - Atm36bDocument11 pagesMC33385 - Atm36btason07Pas encore d'évaluation
- 1/8 To 25 HP NEMA 1 Current Vector Microdrive: A World of Power in The Palm of Your Hand!Document2 pages1/8 To 25 HP NEMA 1 Current Vector Microdrive: A World of Power in The Palm of Your Hand!Jeimy Rafael Zacarias RodriguezPas encore d'évaluation
- Flexible LED Strip SpecificationsDocument21 pagesFlexible LED Strip SpecificationsOmar BrosPas encore d'évaluation
- Miniaturized aluminum capacitors for general purpose useDocument7 pagesMiniaturized aluminum capacitors for general purpose useJUANnn100Pas encore d'évaluation
- Brosur Arr Be RR-100-TB02Document2 pagesBrosur Arr Be RR-100-TB02sharonfifa22Pas encore d'évaluation
- ES 1 MarkDocument5 pagesES 1 MarkVenkatesan SundaramPas encore d'évaluation
- Dpa Iii Plus and Dpa Ii Plus Quick Start Guide: A. Connecting The DPADocument2 pagesDpa Iii Plus and Dpa Ii Plus Quick Start Guide: A. Connecting The DPAJoffre Lautaro Benavides SeminarioPas encore d'évaluation
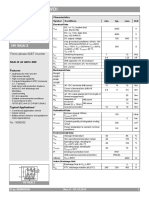
- Skai 45 A2 Gd12-WdiDocument9 pagesSkai 45 A2 Gd12-Wdinishant_dreamviewerPas encore d'évaluation
- ODM POLQA and ODM Digital Audio PDFDocument6 pagesODM POLQA and ODM Digital Audio PDFLê Thế ViệtPas encore d'évaluation
- H31 411 HCNA LTE Exam DumpsDocument13 pagesH31 411 HCNA LTE Exam DumpsAbu DaoudPas encore d'évaluation
- HP 1X Train PackDocument34 pagesHP 1X Train Packdann222Pas encore d'évaluation
- Malvino MCQDocument27 pagesMalvino MCQjedminayPas encore d'évaluation
- Design and Implementation of Sorting Algorithms Based On FPGADocument4 pagesDesign and Implementation of Sorting Algorithms Based On FPGAevitePas encore d'évaluation
- Using The Chipscope Logic Analyzer: 1. OverviewDocument21 pagesUsing The Chipscope Logic Analyzer: 1. OverviewKenny TranPas encore d'évaluation
- GE Current Transformers - P..Document4 pagesGE Current Transformers - P..Adrian M FahriPas encore d'évaluation
- Compact Actuating Room Automation Stations, Bacnet MS/TP, Ac 24 V (Actuating DXR)Document12 pagesCompact Actuating Room Automation Stations, Bacnet MS/TP, Ac 24 V (Actuating DXR)Roudy J. MhawasPas encore d'évaluation
- Considerations and Benefits of Using Five Zones For Distance ProtectionDocument12 pagesConsiderations and Benefits of Using Five Zones For Distance ProtectionSrinivasan SriniPas encore d'évaluation
- (GUIDE) 1st Generation Intel HD Graphics QE:CI - Intel - InsanelyMac ForumDocument44 pages(GUIDE) 1st Generation Intel HD Graphics QE:CI - Intel - InsanelyMac Forumnono heryanaPas encore d'évaluation
- Combined Overcurrent & Earth-Fault Relay: Type SPAJ 140 CDocument8 pagesCombined Overcurrent & Earth-Fault Relay: Type SPAJ 140 CturboedPas encore d'évaluation
- BrightSign Built-In ManualDocument18 pagesBrightSign Built-In ManualecdkPas encore d'évaluation