Vous aimerez peut-être aussi
- IE MagnetfeldsensorenDocument5 pagesIE Magnetfeldsensorenapi-3708508Pas encore d'évaluation
- IE FuzzyDocument5 pagesIE Fuzzyapi-3708508Pas encore d'évaluation
- IE IEC BusDocument7 pagesIE IEC Busapi-3708508Pas encore d'évaluation
- IE MessgleichrichterDocument7 pagesIE Messgleichrichterapi-3708508100% (1)
- IE-KFZ SensorenDocument11 pagesIE-KFZ Sensorenapi-3708508100% (1)
- IE TemperaturmessungDocument16 pagesIE Temperaturmessungapi-3708508Pas encore d'évaluation
- IE DigitalspeicherscopeDocument13 pagesIE Digitalspeicherscopeapi-3708508Pas encore d'évaluation
- Messung Von L Und CDocument6 pagesMessung Von L Und Capi-3708508Pas encore d'évaluation
- IE DualSlopeVerfahrenDocument5 pagesIE DualSlopeVerfahrenapi-3708508Pas encore d'évaluation
- IE PC MesstechnikDocument12 pagesIE PC Messtechnikapi-3708508100% (1)
- IE PC MesstechnikDocument4 pagesIE PC Messtechnikapi-3708508Pas encore d'évaluation
- RisikomanagementDocument8 pagesRisikomanagementapi-3708508Pas encore d'évaluation
- Thyristor, Diac Und TriacDocument9 pagesThyristor, Diac Und Triacapi-3708508100% (4)
- IE-Fast Fourier TransformationDocument16 pagesIE-Fast Fourier Transformationapi-3708508100% (1)
- RCL Nach IDocument2 pagesRCL Nach Iapi-3708508Pas encore d'évaluation
- IE-Digitale FrequenzmessungDocument9 pagesIE-Digitale Frequenzmessungapi-3708508100% (1)
- IE ElektrosicherheitDocument20 pagesIE Elektrosicherheitapi-3708508100% (1)
- Projektwoche-Dokumentaion V0Document31 pagesProjektwoche-Dokumentaion V0api-3708508Pas encore d'évaluation
- GBP-Perserkriege U. Alexander DDocument4 pagesGBP-Perserkriege U. Alexander Dapi-3708508Pas encore d'évaluation
- GPB AbsolutismusDocument4 pagesGPB Absolutismusapi-3708508Pas encore d'évaluation
- Fourier QuantisierungsfehlerDocument2 pagesFourier Quantisierungsfehlerapi-3708508Pas encore d'évaluation
- EDT FormelzettelDocument2 pagesEDT Formelzettelapi-3708508Pas encore d'évaluation
- Controller SchaltungsbeschreibungDocument8 pagesController Schaltungsbeschreibungapi-3708508Pas encore d'évaluation
- IE DehnungsmessstreifenDocument9 pagesIE Dehnungsmessstreifenapi-3708508100% (6)
- Geschichte Mitschrift (20.03Document26 pagesGeschichte Mitschrift (20.03api-3708508Pas encore d'évaluation
- TINF Theorie BaumgartnerDocument204 pagesTINF Theorie Baumgartnerapi-3708508100% (1)
- U F WandlerDocument9 pagesU F Wandlerapi-3708508Pas encore d'évaluation
- EDT Schwerpunktfach ThemenDocument1 pageEDT Schwerpunktfach Themenapi-3708508Pas encore d'évaluation
- GPB MaturathemenDocument1 pageGPB Maturathemenapi-3708508Pas encore d'évaluation
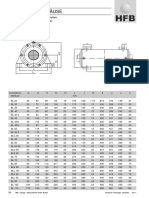
- HFB BLDocument4 pagesHFB BLKarl ThomasPas encore d'évaluation
- Skript Kapitel 10 Bis 11-1Document31 pagesSkript Kapitel 10 Bis 11-1nqpro200266Pas encore d'évaluation
- Easygen 3000 - VDE AR N - 4105Document11 pagesEasygen 3000 - VDE AR N - 4105Duy KhaPas encore d'évaluation
- Handbuch KesselspeisungDocument64 pagesHandbuch KesselspeisungShabaaz Mohammed AbdulPas encore d'évaluation
- Küttner Kolbenmaschinen, Wolfgang EiflerDocument15 pagesKüttner Kolbenmaschinen, Wolfgang EiflerFerNando25% (4)
- V09 Darstellung Verbindungselemente PDFDocument56 pagesV09 Darstellung Verbindungselemente PDFSaidi FirasPas encore d'évaluation
- A. Wipf - Thermodynamik Und Statistische PhysikDocument287 pagesA. Wipf - Thermodynamik Und Statistische Physiknom nom100% (1)
- Eberspacher Heater Hydronic D3WZ VW T4 Installation ManualDocument12 pagesEberspacher Heater Hydronic D3WZ VW T4 Installation Manualnemethlac65Pas encore d'évaluation
- HD 14-5787Document511 pagesHD 14-5787NIEMAIA CONSTRUÇÕESPas encore d'évaluation
- Federal Mogul Glycodur Cat De-EnDocument60 pagesFederal Mogul Glycodur Cat De-EnLuka BornaPas encore d'évaluation
- ET - 3001 - AE310242D - de - It - Es DUMPERDocument118 pagesET - 3001 - AE310242D - de - It - Es DUMPERAlbertoPas encore d'évaluation
- DIN EN ISO 8676 Vijak Fini Ceo NavojDocument16 pagesDIN EN ISO 8676 Vijak Fini Ceo NavojDjordje PetrovicPas encore d'évaluation
- Handleiding STM 500 SV-2 - LappmachineDocument40 pagesHandleiding STM 500 SV-2 - Lappmachineouwe80Pas encore d'évaluation
- GutachtenDocument5 pagesGutachtenJürgen BräutigamPas encore d'évaluation
- Metalcor 1.4301 Aisi 304Document1 pageMetalcor 1.4301 Aisi 304Hans GoethePas encore d'évaluation