Vous aimerez peut-être aussi
- Das Heiligste Der Welt - EDocument8 pagesDas Heiligste Der Welt - EPatrick MühlhausenPas encore d'évaluation
- Isfahan From The Far East Suite Duke Ellington and Billy Strayhorn Trans David Berger 27P Score and PartsDocument27 pagesIsfahan From The Far East Suite Duke Ellington and Billy Strayhorn Trans David Berger 27P Score and Partsclasijazz100% (1)
- Nephron Map PDFDocument1 pageNephron Map PDFDan TadeoPas encore d'évaluation
- RENR 8392 (AGC1302 - Up)Document2 pagesRENR 8392 (AGC1302 - Up)graemefPas encore d'évaluation
- Photograph 4 BDocument14 pagesPhotograph 4 BSchwabePas encore d'évaluation
- Carry On PDFDocument5 pagesCarry On PDFMMPas encore d'évaluation
- Jane Maryam (Nazanine Maryam) : Allegretto Grazioso (Document5 pagesJane Maryam (Nazanine Maryam) : Allegretto Grazioso (rezaPas encore d'évaluation
- Crimson Tide Score A4Document15 pagesCrimson Tide Score A4David CaruanaPas encore d'évaluation
- Enfermera - Gran OrquestaDocument10 pagesEnfermera - Gran Orquestacarlos santanderPas encore d'évaluation
- Gecko - Unison Full ScoreDocument3 pagesGecko - Unison Full ScoreAnaPas encore d'évaluation
- Fernvale Vines PDFDocument39 pagesFernvale Vines PDFShirleyPas encore d'évaluation
- From This Moment - Voz+pianoDocument3 pagesFrom This Moment - Voz+pianoSaraCruzPas encore d'évaluation
- Plan Situatie Extindere RA Baluseni PS2000Document4 pagesPlan Situatie Extindere RA Baluseni PS2000Bogdan FocsaneanuPas encore d'évaluation
- Nicholas Politi: Blooming SeasonDocument8 pagesNicholas Politi: Blooming SeasonNick PolitiPas encore d'évaluation
- Kupdfnet - Antognini I This Song PDFDocument12 pagesKupdfnet - Antognini I This Song PDFTri SamosirPas encore d'évaluation
- Valse: For Mixed Speaking Chorus and Optional Percussion (2 Players)Document25 pagesValse: For Mixed Speaking Chorus and Optional Percussion (2 Players)fluieras36_854251339Pas encore d'évaluation
- RenalDocument1 pageRenalYezin Shamoon100% (1)
- Mapa en PDFDocument1 pageMapa en PDFKacper MikulskiPas encore d'évaluation
- Eet (Transponoitu)Document3 pagesEet (Transponoitu)Riitta PiirainenPas encore d'évaluation
- Coup de CoeurDocument4 pagesCoup de CoeurTanPas encore d'évaluation
- O CRUX - SorsDocument3 pagesO CRUX - SorsManuel García NegretePas encore d'évaluation
- Kyrie Piano CoroDocument3 pagesKyrie Piano CoroMiriam Jiménez100% (1)
- 471 Let Us Break Bread Together Brass Quartet SCOREDocument1 page471 Let Us Break Bread Together Brass Quartet SCOREIan RobbinsPas encore d'évaluation
- Cries of London Full ScoreDocument15 pagesCries of London Full ScoreDaniel YasarPas encore d'évaluation
- The Great Divide-CompletoDocument13 pagesThe Great Divide-CompletoDaniel FaliosaPas encore d'évaluation
- Hino Do Estado de Pernambuco PDFDocument28 pagesHino Do Estado de Pernambuco PDFJosias AdolfoPas encore d'évaluation
- Mas Vale TrocarDocument5 pagesMas Vale TrocarGenaro CarranzaPas encore d'évaluation
- Scribble (Work in Progress)Document7 pagesScribble (Work in Progress)José MartínezPas encore d'évaluation
- The House of The Rising Sun PDFDocument6 pagesThe House of The Rising Sun PDFGabriel Petri OpitzPas encore d'évaluation
- Name Os IDocument1 pageName Os IWilliam E. FieldsPas encore d'évaluation
- 05 PerdendoDocument1 page05 Perdendoapi-3824232Pas encore d'évaluation
- Грабовський Concerto misteriosoDocument38 pagesГрабовський Concerto misteriosoElena LisovenkoPas encore d'évaluation
- Agnus Missa Tertia (Haller)Document4 pagesAgnus Missa Tertia (Haller)Coral Jesus DespojadoPas encore d'évaluation
- Child is Born: Analysis of Jude Nwankwo's Christmas Carol SettingDocument9 pagesChild is Born: Analysis of Jude Nwankwo's Christmas Carol SettingSixtus0% (1)
- Livada (Mellow)Document13 pagesLivada (Mellow)Ilija Atanasov100% (1)
- March From The Nutcracker: Tempo Di Marcia VivaDocument12 pagesMarch From The Nutcracker: Tempo Di Marcia Vivaจิรกิตติ์ อาษากิจPas encore d'évaluation
- PM NB Gut Brain Axis STRY0042104 WebDocument3 pagesPM NB Gut Brain Axis STRY0042104 WebechidnePas encore d'évaluation
- Out of NowherDocument5 pagesOut of NowherNorman ZubisPas encore d'évaluation
- Space Only Show Feature Shell Scheme Walk-on PackageDocument1 pageSpace Only Show Feature Shell Scheme Walk-on PackageNataliaPas encore d'évaluation
- Violin Accordion Caprice No. 24 in A Minor Niccol PaganiniDocument9 pagesViolin Accordion Caprice No. 24 in A Minor Niccol PaganiniROBINPas encore d'évaluation
- Prelude Te Deum: Marc Antoine Charpentier 1643-1707Document41 pagesPrelude Te Deum: Marc Antoine Charpentier 1643-1707giovyPas encore d'évaluation
- Aerodrome Obstacle Chart - Icao Type BDocument2 pagesAerodrome Obstacle Chart - Icao Type BLoïc GIROUDPas encore d'évaluation
- Seor Ten Piedad Francisco Palazn Alrededor de Tu MesaDocument1 pageSeor Ten Piedad Francisco Palazn Alrededor de Tu Mesass10099Pas encore d'évaluation
- Traffic Rail T80HT (00000002)Document3 pagesTraffic Rail T80HT (00000002)tianjinshin100% (1)
- Jazz Masters Play GershwinDocument6 pagesJazz Masters Play GershwinEdgar Arruda0% (1)
- Clearing and Grubbing 052622Document1 pageClearing and Grubbing 052622CCDC PTP MabalacatPas encore d'évaluation
- Brighton - Citywide - Map2017Document1 pageBrighton - Citywide - Map2017LucPas encore d'évaluation
- SpacerDocument1 pageSpacerkillewPas encore d'évaluation
- Californication - RHCPDocument4 pagesCalifornication - RHCPJeremySanchezParraPas encore d'évaluation
- Strauss Alphorn Tune Dedicated FatherDocument8 pagesStrauss Alphorn Tune Dedicated FatherMillerPas encore d'évaluation
- Blooming Season (2017)Document8 pagesBlooming Season (2017)Nick PolitiPas encore d'évaluation
- For The Sake of The GospelDocument8 pagesFor The Sake of The GospelshielabcincoPas encore d'évaluation
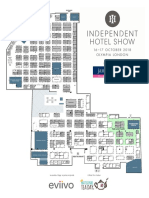
- Independent Hotel Show 2018 - Floor Plan 13.03.2018 PDFDocument1 pageIndependent Hotel Show 2018 - Floor Plan 13.03.2018 PDFDiana MihaelaPas encore d'évaluation
- Buoi 0Document2 pagesBuoi 0Đạt Lê Quý QuốcPas encore d'évaluation
- Batman2 Scenario SuicideSquad enDocument7 pagesBatman2 Scenario SuicideSquad enJohn OldfieldPas encore d'évaluation
- Gotta Be Patient: Saxofón ContraltoDocument1 pageGotta Be Patient: Saxofón ContraltomabekPas encore d'évaluation
- Digimap Roam-7Document1 pageDigimap Roam-7Selin T GuzelogluPas encore d'évaluation
- Pdu-2019-Plano AprovadoDocument1 pagePdu-2019-Plano AprovadodavidPas encore d'évaluation
- Angels We Have Heard on High Sheet MusicDocument7 pagesAngels We Have Heard on High Sheet MusicVanessa KaiserPas encore d'évaluation
- It's So Easy Going Green: An Interactive, Scientific Look at Protecting Our EnvironmentD'EverandIt's So Easy Going Green: An Interactive, Scientific Look at Protecting Our EnvironmentPas encore d'évaluation
- V6 Human MouseDocument44 pagesV6 Human Mouseapi-3779164Pas encore d'évaluation
- Section OneDocument25 pagesSection Oneapi-3779164Pas encore d'évaluation
- Sequence Comparison Method of Dna PredictionDocument18 pagesSequence Comparison Method of Dna PredictionbwwcomPas encore d'évaluation
- Perl IntroDocument21 pagesPerl Introapi-3779164Pas encore d'évaluation
- 1998 TrendsguideDocument4 pages1998 Trendsguideapi-3779164Pas encore d'évaluation
- V8 Protein PhylogenyDocument31 pagesV8 Protein Phylogenyapi-3779164Pas encore d'évaluation
- Biotech Companies in IndiaDocument9 pagesBiotech Companies in Indiaapi-3779164100% (5)
- Biological Sequence AnalysisDocument90 pagesBiological Sequence AnalysisSiva Rajan KPas encore d'évaluation
- Bioinformatics CompaniesDocument12 pagesBioinformatics Companiesapi-3779164100% (1)
- Python TutDocument198 pagesPython Tutapi-37791640% (1)
- MobioDocument3 pagesMobioapi-3779164Pas encore d'évaluation
- CompgenomicsDocument8 pagesCompgenomicsapi-3779164Pas encore d'évaluation
- Basics of Molecular BiologyDocument7 pagesBasics of Molecular Biologykinasih_dyahPas encore d'évaluation
- Section FourDocument20 pagesSection Fourapi-3779164100% (1)
- BioperlDocument98 pagesBioperlapi-3779164100% (2)
- Genome SequencingDocument21 pagesGenome SequencingBalraj RandhawaPas encore d'évaluation
- Transgenic Animals: Submitted by Pratham Varshney Xii A 23Document16 pagesTransgenic Animals: Submitted by Pratham Varshney Xii A 23PappuPas encore d'évaluation
- Vaccine Types: Monovalent vs MultivalentDocument2 pagesVaccine Types: Monovalent vs MultivalentGrayPas encore d'évaluation
- Gen Micro Micro D&R AgamDocument157 pagesGen Micro Micro D&R AgamNirosha Arul100% (1)
- Developing an Investigator Brochure or IMPDDocument7 pagesDeveloping an Investigator Brochure or IMPDMondo BijainePas encore d'évaluation
- Karnataka 2nd PUC Biology Question PapersDocument233 pagesKarnataka 2nd PUC Biology Question Papersrahul10690% (10)
- Polymerase Chain Reaction (PCR) - Principle, Steps, ApplicationsDocument5 pagesPolymerase Chain Reaction (PCR) - Principle, Steps, ApplicationsMokhtarCheikhPas encore d'évaluation
- Assignment On VirusDocument17 pagesAssignment On VirusRinta Moon100% (1)
- Binder 2Document2 pagesBinder 2Nur AkbarPas encore d'évaluation
- Vivas in Surgical Pathology For DM 1: What Is A Neoplasm? Define Neoplasia?Document11 pagesVivas in Surgical Pathology For DM 1: What Is A Neoplasm? Define Neoplasia?Giovanni HenryPas encore d'évaluation
- As Biology: Unit 2 Notes (Edexcel)Document21 pagesAs Biology: Unit 2 Notes (Edexcel)Charity Owo100% (1)
- Arizona BioMap 2020 12 22Document234 pagesArizona BioMap 2020 12 22miltonPas encore d'évaluation
- Kami Export - Yunus Haq - Amoeba Sisters - DNA RecapDocument2 pagesKami Export - Yunus Haq - Amoeba Sisters - DNA RecapYunus HaqPas encore d'évaluation
- MEKANISME RESISTENSI ANTIMIKROBADocument12 pagesMEKANISME RESISTENSI ANTIMIKROBAAhmad Alfiansyah SaidPas encore d'évaluation
- 1Kb Plus DNA Ladder ManDocument2 pages1Kb Plus DNA Ladder ManRak TyagiPas encore d'évaluation
- JNIMS Pharmacology Class Routine April 2020Document1 pageJNIMS Pharmacology Class Routine April 2020Neerajeigya ManoharPas encore d'évaluation
- Cell Structure and Function Answered Review SP 08Document16 pagesCell Structure and Function Answered Review SP 08Yader Camilo Caicedo DelgadoPas encore d'évaluation
- Susceptibility of Drug-Resistant Clinical Herpes Simplex Virus Type 1 Strains To Essential Oils of Ginger, Thyme, Hyssop, and Sandalwood 0426-06Document4 pagesSusceptibility of Drug-Resistant Clinical Herpes Simplex Virus Type 1 Strains To Essential Oils of Ginger, Thyme, Hyssop, and Sandalwood 0426-06Anonymous i71HvPXPas encore d'évaluation
- Principles of GeneticsDocument161 pagesPrinciples of GeneticsSomeone100% (3)
- Plant Specialized MetabolismDocument389 pagesPlant Specialized MetabolismzuilinhaPas encore d'évaluation
- Borang Rekod Perkembangan Murid Bio F4Document32 pagesBorang Rekod Perkembangan Murid Bio F4tajulPas encore d'évaluation
- Assignment of Pathology 401: Submitted byDocument5 pagesAssignment of Pathology 401: Submitted byaymen gulzarPas encore d'évaluation
- Lab results for COVID-19 PCR testDocument1 pageLab results for COVID-19 PCR testYeoh Zi-NingPas encore d'évaluation
- Class - 12 - Biology-MCQ Mock Test PaperDocument4 pagesClass - 12 - Biology-MCQ Mock Test PaperRohit PatelPas encore d'évaluation
- BIO 314 Review Sheet Chapt. 2&3Document5 pagesBIO 314 Review Sheet Chapt. 2&3Akbar ShakoorPas encore d'évaluation
- 4.3 Genetic Diversity Via Mutation QP PDFDocument11 pages4.3 Genetic Diversity Via Mutation QP PDFMuffarrahPas encore d'évaluation
- KNHS Grade 10 Science Class Tackles BiomoleculesDocument5 pagesKNHS Grade 10 Science Class Tackles BiomoleculesMonalisa TungkagPas encore d'évaluation
- New Tools For Functional Genomic AnalysisDocument11 pagesNew Tools For Functional Genomic AnalysisMoniPas encore d'évaluation
- Microbiological Investigation of The Space Dust CollectedDocument8 pagesMicrobiological Investigation of The Space Dust CollectedLuisa González BautistaPas encore d'évaluation
- Ab65475 Quick Cell Proliferation Assay Kit II Protocol v2 (Website)Document12 pagesAb65475 Quick Cell Proliferation Assay Kit II Protocol v2 (Website)Venkatesh GaviniPas encore d'évaluation