Vous aimerez peut-être aussi
- Rapid Prep Easy To Read HandoutDocument473 pagesRapid Prep Easy To Read HandoutTina Moore93% (15)
- House Designs, QHC, 1950Document50 pagesHouse Designs, QHC, 1950House Histories100% (8)
- Bretschneider SpectrumDocument9 pagesBretschneider SpectrumSunil Kumar P GPas encore d'évaluation
- MSJ41503 - Intro To Maritime ManagementDocument6 pagesMSJ41503 - Intro To Maritime ManagementkjPas encore d'évaluation
- Empirical FormulaDocument85 pagesEmpirical Formulaapi-2717651994% (36)
- The Templist Scroll by :dr. Lawiy-Zodok (C) (R) TMDocument144 pagesThe Templist Scroll by :dr. Lawiy-Zodok (C) (R) TM:Lawiy-Zodok:Shamu:-El100% (5)
- Troubleshooting Hydraulic Circuits: Fluid PowerDocument32 pagesTroubleshooting Hydraulic Circuits: Fluid PowerMi LuanaPas encore d'évaluation
- Effective Time ManagementDocument61 pagesEffective Time ManagementTafadzwa94% (16)
- Sea Ice ModelingDocument29 pagesSea Ice Modelingkorina_kuharPas encore d'évaluation
- Polar Code Progress and ChallengesDocument16 pagesPolar Code Progress and ChallengesMeghna SinghPas encore d'évaluation
- Conditiion of ClassificationDocument55 pagesConditiion of ClassificationVeeraiah AnbuPas encore d'évaluation
- Attachment - Propeller CurveDocument4 pagesAttachment - Propeller CurveKristen Clark100% (1)
- Polar Class Rules OverviewDocument32 pagesPolar Class Rules OverviewDac Dung TruongPas encore d'évaluation
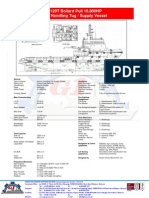
- 70m 120T Bollard Pull 10,800HPDocument1 page70m 120T Bollard Pull 10,800HPMohd ZaidPas encore d'évaluation
- Maritime Equipment Suppliers 2018Document32 pagesMaritime Equipment Suppliers 2018SoniaPas encore d'évaluation
- Why Captain's Cabin Is Always On Starboard SideDocument2 pagesWhy Captain's Cabin Is Always On Starboard SideKunal SinghPas encore d'évaluation
- Ang 1 Marine-Power-Plants PDFDocument75 pagesAng 1 Marine-Power-Plants PDFVincent KohPas encore d'évaluation
- Nexans Norway AS m/v Elektron 2009 Annual DP trials reportDocument50 pagesNexans Norway AS m/v Elektron 2009 Annual DP trials reportRamon Teixeira DiasPas encore d'évaluation
- Ice PassportDocument49 pagesIce PassportAbdel Nasser Al-sheikh YousefPas encore d'évaluation
- Marine Power Plant ChaprichDocument336 pagesMarine Power Plant ChaprichBorysTym100% (2)
- Approximate Method of Calculating Forces On Rudder During Ship Sailing On A Shipping RouteDocument6 pagesApproximate Method of Calculating Forces On Rudder During Ship Sailing On A Shipping RouteKay OosterwegelPas encore d'évaluation
- 13326 - Electrónica de Potencia (Diplomado Máquinas NavalesDocument20 pages13326 - Electrónica de Potencia (Diplomado Máquinas NavalesSergey MikhailovPas encore d'évaluation
- Stability Criteria (CR)Document175 pagesStability Criteria (CR)georgekc77Pas encore d'évaluation
- ROPAX ESTONIA: Stockholm Agreement Past, Present, FutureDocument34 pagesROPAX ESTONIA: Stockholm Agreement Past, Present, Futuregnd100Pas encore d'évaluation
- Grounding Case StudyDocument31 pagesGrounding Case StudyRuiCruz100% (1)
- Silver Fern Yacht Operations Manual 2Document47 pagesSilver Fern Yacht Operations Manual 2PH Ph GnsoPas encore d'évaluation
- Pollution by Ships Presentation)Document16 pagesPollution by Ships Presentation)mylife10Pas encore d'évaluation
- How NBDP Works and How to Use it in GMDSS CommunicationsDocument14 pagesHow NBDP Works and How to Use it in GMDSS CommunicationsKunal SinghPas encore d'évaluation
- KONGSBERG Fleet PerformanceDocument2 pagesKONGSBERG Fleet Performancec108Pas encore d'évaluation
- Marflex Deepwell Pump Brochure v3Document7 pagesMarflex Deepwell Pump Brochure v3Stathis MoumousisPas encore d'évaluation
- TOJan Feb 16Document40 pagesTOJan Feb 16kumararajPas encore d'évaluation
- ImdgintroDocument31 pagesImdgintroVitalie FricatelPas encore d'évaluation
- An Overview of Ais 1082Document44 pagesAn Overview of Ais 1082pakitoafPas encore d'évaluation
- Product Guide o e w32Document200 pagesProduct Guide o e w32Zia Ur RehmanPas encore d'évaluation
- 700/3000 VA User's Guide: Eaton 9130 UPSDocument98 pages700/3000 VA User's Guide: Eaton 9130 UPSRodrigo Molina ContrerasPas encore d'évaluation
- Part W Navigation Bridge VisibilityDocument9 pagesPart W Navigation Bridge VisibilityDian Nafi' AhmadPas encore d'évaluation
- Weather Routing Service (WRS)Document24 pagesWeather Routing Service (WRS)Mamut AliPas encore d'évaluation
- Marine Vessel Reference ListDocument133 pagesMarine Vessel Reference ListAndreiGeorgescuPas encore d'évaluation
- Read This Manual Carefully Before OperationDocument126 pagesRead This Manual Carefully Before OperationSteven AmadorPas encore d'évaluation
- Change of Ship Management CompressedDocument29 pagesChange of Ship Management CompressedNeldethchie SerranoPas encore d'évaluation
- Dopler Speed Log Model DS-80 PDFDocument35 pagesDopler Speed Log Model DS-80 PDFKerri FosterPas encore d'évaluation
- Abs Condition of ClassDocument16 pagesAbs Condition of ClassJon LopezPas encore d'évaluation
- Rules For The Classification and Construction of Sea-Going Ships, Part V SubdivisionDocument47 pagesRules For The Classification and Construction of Sea-Going Ships, Part V SubdivisionKevin ChanPas encore d'évaluation
- Propulsion Trends in Container VesselsDocument28 pagesPropulsion Trends in Container VesselsAdrianMictarPas encore d'évaluation
- Spring Return and Double Acting Pneumatic Quarter-Turn Actuators For Output Torques To 27,624 LB - inDocument8 pagesSpring Return and Double Acting Pneumatic Quarter-Turn Actuators For Output Torques To 27,624 LB - inThanh Vuong NguyenPas encore d'évaluation
- Wartsila Marine Reduction GearsDocument8 pagesWartsila Marine Reduction GearsFederico CurroPas encore d'évaluation
- Anemometer - Wikipedia, The Free EncyclopediaDocument8 pagesAnemometer - Wikipedia, The Free Encyclopediamailsk123Pas encore d'évaluation
- Cooling Sea Water Service System ExplainedDocument3 pagesCooling Sea Water Service System ExplainedAustin UdofiaPas encore d'évaluation
- 7 5-04-01-01.2 Analysis of Speed Power Trial Data PDFDocument25 pages7 5-04-01-01.2 Analysis of Speed Power Trial Data PDFNestor Gómez RojasPas encore d'évaluation
- Classification Society - Capt - Saujanya SinhaDocument3 pagesClassification Society - Capt - Saujanya SinhaJitender MalikPas encore d'évaluation
- STA Article 30jan2013 PDFDocument11 pagesSTA Article 30jan2013 PDFpriyoPas encore d'évaluation
- Lehm0028 00Document4 pagesLehm0028 00Aidel MustafaPas encore d'évaluation
- 160639ar HiPAP Hull UnitsDocument258 pages160639ar HiPAP Hull UnitsCristi Bogdan CiobanelPas encore d'évaluation
- Wavescan Buoy PDFDocument4 pagesWavescan Buoy PDFRam MugeshPas encore d'évaluation
- Load Lines and Draught MarksDocument9 pagesLoad Lines and Draught MarksEco Jiko100% (1)
- A Review On The Faults of Electric MachiDocument8 pagesA Review On The Faults of Electric Machifares noureddinePas encore d'évaluation
- Brief Overview Generator Free Ebook Part1 FinalDocument44 pagesBrief Overview Generator Free Ebook Part1 FinalSushant SinghPas encore d'évaluation
- 19 Off Hire StatementDocument1 page19 Off Hire StatementopytnymoryakPas encore d'évaluation
- Engine Room Simulator MAN B&W 5L90MC-L11 - Part 3 Machinery and OperationDocument202 pagesEngine Room Simulator MAN B&W 5L90MC-L11 - Part 3 Machinery and Operationninja_ninjagoPas encore d'évaluation
- Ballast Water ManagementDocument10 pagesBallast Water ManagementsedssubscriptionsPas encore d'évaluation
- Module General Ship KnowledgeDocument5 pagesModule General Ship Knowledgepothirajkalyan0% (1)
- Application Form KOTCDocument3 pagesApplication Form KOTCgmatweak100% (3)
- Windship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985D'EverandWindship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985C SatchwellPas encore d'évaluation
- Compliant Offshore StructureDocument50 pagesCompliant Offshore Structureapi-27176519100% (4)
- Compliant Offshore StructureDocument50 pagesCompliant Offshore Structureapi-27176519100% (4)
- Submarine DesignDocument32 pagesSubmarine Designapi-2717651960% (5)
- Ice Class TankerDocument231 pagesIce Class Tankerapi-27176519100% (1)
- Marprop Output RadanDocument12 pagesMarprop Output Radansathi111Pas encore d'évaluation
- Unconventional PropulsionDocument43 pagesUnconventional Propulsionapi-27176519100% (2)
- Squat 3Document1 pageSquat 3api-27176519100% (1)
- Ice Class TankerDocument231 pagesIce Class Tankerapi-27176519100% (1)
- Capacity and TrimDocument65 pagesCapacity and Trimapi-27176519100% (2)
- Safety in Shipyard (Electrical Sys)Document19 pagesSafety in Shipyard (Electrical Sys)api-27176519100% (1)
- X Ray TestingDocument24 pagesX Ray Testingapi-27176519100% (6)
- Basics of Ship ResistanceDocument44 pagesBasics of Ship Resistanceapi-27176519100% (15)
- RuleDocument31 pagesRuleapi-27176519100% (1)
- Seppo Liukkonen GLDocument11 pagesSeppo Liukkonen GLapi-27176519Pas encore d'évaluation
- Ice Briefing 20190404Document24 pagesIce Briefing 20190404api-27176519Pas encore d'évaluation
- Ice Strengthened ShipsDocument13 pagesIce Strengthened Shipsapi-27176519100% (1)
- Ice CassaDocument31 pagesIce Cassaapi-27176519Pas encore d'évaluation
- NotationDocument10 pagesNotationapi-27176519100% (1)
- Oil DensityDocument7 pagesOil Densityapi-27176519Pas encore d'évaluation
- 0427 Isp 76Document24 pages0427 Isp 76api-27176519Pas encore d'évaluation
- Res PropulsionDocument25 pagesRes Propulsionapi-27176519100% (3)
- Double Acting Ice Class TankerDocument13 pagesDouble Acting Ice Class Tankervimal256 at gmail.comPas encore d'évaluation
- IntroductionDocument58 pagesIntroductionapi-27176519100% (2)
- Concept ReportDocument28 pagesConcept Reportapi-27176519Pas encore d'évaluation
- OullineDocument13 pagesOullineapi-27176519100% (2)
- MidshipDocument31 pagesMidshipapi-27176519100% (2)
- ML AiDocument2 pagesML AiSUYASH SHARTHIPas encore d'évaluation
- Draft Initial Study - San Joaquin Apartments and Precinct Improvements ProjectDocument190 pagesDraft Initial Study - San Joaquin Apartments and Precinct Improvements Projectapi-249457935Pas encore d'évaluation
- Who will buy electric vehicles Segmenting the young Indian buyers using cluster analysisDocument12 pagesWho will buy electric vehicles Segmenting the young Indian buyers using cluster analysisbhasker sharmaPas encore d'évaluation
- Basic First AidDocument31 pagesBasic First AidMark Anthony MaquilingPas encore d'évaluation
- Plate-Load TestDocument20 pagesPlate-Load TestSalman LakhoPas encore d'évaluation
- BCP-8000 User's ManualDocument36 pagesBCP-8000 User's ManualAsad PatelPas encore d'évaluation
- 1989 GMC Light Duty Truck Fuel and Emissions Including Driveability PDFDocument274 pages1989 GMC Light Duty Truck Fuel and Emissions Including Driveability PDFRobert Klitzing100% (1)
- Sattvik Brochure - Web VersionDocument4 pagesSattvik Brochure - Web Versionudiptya_papai2007Pas encore d'évaluation
- Mechanical Specifications For Fiberbond ProductDocument8 pagesMechanical Specifications For Fiberbond ProducthasnizaPas encore d'évaluation
- Peptic Ulcer Disease: Causes, Symptoms and TreatmentDocument24 pagesPeptic Ulcer Disease: Causes, Symptoms and TreatmentOktaviana Sari Dewi100% (1)
- Air Arms S400 EXPDocument3 pagesAir Arms S400 EXPapi-3695814Pas encore d'évaluation
- Cyclograph User ManualDocument15 pagesCyclograph User ManualPeter BatePas encore d'évaluation
- STS Chapter 1 ReviewerDocument4 pagesSTS Chapter 1 ReviewerEunice AdagioPas encore d'évaluation
- Reiki BrochureDocument2 pagesReiki BrochureShikha AgarwalPas encore d'évaluation
- Essentials For Professionals: Road Surveys Using SmartphonesDocument25 pagesEssentials For Professionals: Road Surveys Using SmartphonesDoly ManurungPas encore d'évaluation
- Certificate Testing ResultsDocument1 pageCertificate Testing ResultsNisarg PandyaPas encore d'évaluation
- JUPITER 9000K H1PreliminaryDocument1 pageJUPITER 9000K H1PreliminaryMarian FlorescuPas encore d'évaluation
- Hyperbaric WeldingDocument17 pagesHyperbaric WeldingRam KasturiPas encore d'évaluation
- Idioms & Phrases Till CGL T1 2016Document25 pagesIdioms & Phrases Till CGL T1 2016mannar.mani.2000100% (1)
- Digital Communication QuestionsDocument14 pagesDigital Communication QuestionsNilanjan BhattacharjeePas encore d'évaluation
- Chapter 16 - Energy Transfers: I) Answer The FollowingDocument3 pagesChapter 16 - Energy Transfers: I) Answer The FollowingPauline Kezia P Gr 6 B1Pas encore d'évaluation
- Private Schools Provide Better EducationDocument2 pagesPrivate Schools Provide Better EducationcitraPas encore d'évaluation
- DENSO COMMON RAIL INJECTOR REPAIR GUIDEDocument22 pagesDENSO COMMON RAIL INJECTOR REPAIR GUIDEMarcoPas encore d'évaluation
- The Temple of ChaosDocument43 pagesThe Temple of ChaosGauthier GohorryPas encore d'évaluation
- Letter of MotivationDocument4 pagesLetter of Motivationjawad khalidPas encore d'évaluation