Vous aimerez peut-être aussi
- Interfaces y Periféricos (Spanish Edition) - NodrmDocument55 pagesInterfaces y Periféricos (Spanish Edition) - NodrmFernando VegaPas encore d'évaluation
- Tema 6 Caso PrácticoDocument6 pagesTema 6 Caso PrácticoAmparo Manes100% (4)
- Introduccion LabVIEWDocument13 pagesIntroduccion LabVIEWISRAEL AMADORPas encore d'évaluation
- Pwm2 - Control de MotorDocument4 pagesPwm2 - Control de Motorjavier_valdivia_42Pas encore d'évaluation
- Estimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareD'EverandEstimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwarePas encore d'évaluation
- Enfoque práctico de control moderno: Con aplicaciones en MatlabD'EverandEnfoque práctico de control moderno: Con aplicaciones en MatlabÉvaluation : 5 sur 5 étoiles5/5 (1)
- Practica 1Document19 pagesPractica 1Luis BecerrilPas encore d'évaluation
- VHDL ProyectosDocument92 pagesVHDL ProyectosLander Arturo Rubio JuarezPas encore d'évaluation
- Modalidades de ControlDocument38 pagesModalidades de ControlJuan Se Uribe RamirezPas encore d'évaluation
- Desarrollo de Un Sistema Mecatrónico Tipo Péndulo Invertido Sobre Base MóvilDocument142 pagesDesarrollo de Un Sistema Mecatrónico Tipo Péndulo Invertido Sobre Base MóvilAlexander WalkerPas encore d'évaluation
- Diseño de Convertidores DC-DC Tipo Buck Típicos y Controlado para Un Mejor Entendimiento en Cuanto A Su Funcionamiento.Document12 pagesDiseño de Convertidores DC-DC Tipo Buck Típicos y Controlado para Un Mejor Entendimiento en Cuanto A Su Funcionamiento.hhryc7100% (3)
- CirosRobotics 2013 I HSDocument50 pagesCirosRobotics 2013 I HSDaniel Henao SantanaPas encore d'évaluation
- Protocolo ProfibusDocument14 pagesProtocolo ProfibusAllen Saavedra Lopez100% (1)
- Pendulo InvertidoDocument24 pagesPendulo InvertidoMaría Márquez RestrepoPas encore d'évaluation
- Tesis Analisis y Procesamiento de Senales DigitalesDocument107 pagesTesis Analisis y Procesamiento de Senales DigitalesSasha Salguero100% (1)
- AgoDic 2012 - Cap 1 IntroDocument25 pagesAgoDic 2012 - Cap 1 IntroAdrian MorenoPas encore d'évaluation
- Sistemas Digitales de Control de ProcesosDocument16 pagesSistemas Digitales de Control de ProcesosMathias MollePas encore d'évaluation
- Control PID para Motores DCDocument6 pagesControl PID para Motores DCNiko Garcia MeythalerPas encore d'évaluation
- Libreria Retardos en MPLABDocument4 pagesLibreria Retardos en MPLABFabian GuarinPas encore d'évaluation
- Lab 09 Sintonizacion PID Metodo de OscilacionDocument8 pagesLab 09 Sintonizacion PID Metodo de OscilacionJherson Miranda CabanillasPas encore d'évaluation
- Lab. Lugar Geométrico de La RaícesDocument13 pagesLab. Lugar Geométrico de La RaícesJessica FernandezPas encore d'évaluation
- Manual Primer NivelDocument64 pagesManual Primer Niveljofer640204Pas encore d'évaluation
- Practica 3. Espacio de EstadoDocument21 pagesPractica 3. Espacio de EstadoLUISPas encore d'évaluation
- Trayectoria y Estabilidad en El Espacio de EstadoDocument3 pagesTrayectoria y Estabilidad en El Espacio de EstadoMaria Victoria PadillaPas encore d'évaluation
- Control AutomáticoDocument70 pagesControl AutomáticoMarcos Schlegel100% (1)
- NivelDocument20 pagesNivelVianey GurubelPas encore d'évaluation
- APUNTE WinCC Flexible 2008 Con Ejemplo Revisión Oct 2012Document33 pagesAPUNTE WinCC Flexible 2008 Con Ejemplo Revisión Oct 2012nathan_allgrenPas encore d'évaluation
- Modelado Matemático de Sistemas DinámicosDocument19 pagesModelado Matemático de Sistemas Dinámicospiwy017Pas encore d'évaluation
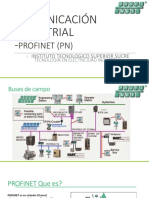
- ProfinetpnDocument41 pagesProfinetpnLuisDavidStarkPas encore d'évaluation
- 01-Modelado Matematico de Sistemas de ControlDocument52 pages01-Modelado Matematico de Sistemas de ControlLuis Eduardo Martinez RuizPas encore d'évaluation
- Trabajo Protocolo Foundation FIELDBUSDocument25 pagesTrabajo Protocolo Foundation FIELDBUSbrayan arley diaz diazPas encore d'évaluation
- Protocolo CIPDocument48 pagesProtocolo CIPPaul EcheverríaPas encore d'évaluation
- ModbusDocument6 pagesModbusMiguel RodriguezPas encore d'évaluation
- OPC OLE For Process ControlDocument120 pagesOPC OLE For Process Controlsmith muñozPas encore d'évaluation
- Buses de Comunicación IndustrialDocument9 pagesBuses de Comunicación IndustrialjosePas encore d'évaluation
- Controladores Lógicos Programables PLCS: Msc. July Andrea Gómez CamperosDocument43 pagesControladores Lógicos Programables PLCS: Msc. July Andrea Gómez Camperosluis chaustrePas encore d'évaluation
- Cap13 Red NeuronalDocument26 pagesCap13 Red Neuronalquisi123Pas encore d'évaluation
- Automatismo Programable Por PLCDocument19 pagesAutomatismo Programable Por PLCHenry Blas SolanoPas encore d'évaluation
- Articulo Robot CartesianoDocument5 pagesArticulo Robot CartesianoRafa SantiagoPas encore d'évaluation
- Scada Con SiemensDocument9 pagesScada Con SiemensSid Oo100% (1)
- Red Ethernet IP 1Document13 pagesRed Ethernet IP 1Edwin AguilarPas encore d'évaluation
- Human Machine Interface Interfaz Hombre-Máquina HMIDocument35 pagesHuman Machine Interface Interfaz Hombre-Máquina HMIMartha Lozada NavarroPas encore d'évaluation
- PID - Universidad de Vigo PDFDocument26 pagesPID - Universidad de Vigo PDFJose Camilo Eraso GuerreroPas encore d'évaluation
- Interbus PresentaciónDocument14 pagesInterbus PresentaciónIsrael GomezPas encore d'évaluation
- Diseno de Un PID para Control de VelocidadDocument38 pagesDiseno de Un PID para Control de VelocidadMario Vasquez A.Pas encore d'évaluation
- Guia de Estudio para Instrumentacion ElectricaDocument535 pagesGuia de Estudio para Instrumentacion ElectricaEdgar RPas encore d'évaluation
- Cuadernillo de Control Digital ITSMotulDocument65 pagesCuadernillo de Control Digital ITSMotulSean EllisPas encore d'évaluation
- Sistema de Control Distribuido - Nuñez QuispeDocument12 pagesSistema de Control Distribuido - Nuñez QuispeAmanda Larson100% (1)
- Capitulo 3. Acondicionamiento de SenalesDocument19 pagesCapitulo 3. Acondicionamiento de SenalesDagoberto Ascanio RomeroPas encore d'évaluation
- Tesis Pendulo InvertidoDocument163 pagesTesis Pendulo InvertidoJor Ge0% (1)
- Calidad de La Energia ElectricaDocument17 pagesCalidad de La Energia ElectricaManuel LopezPas encore d'évaluation
- Espacio de EstadosDocument59 pagesEspacio de Estadosjzerox5Pas encore d'évaluation
- Capítulo 5 Herencia y Polimorfismo - Cxvs - Versión Final CorregidaDocument88 pagesCapítulo 5 Herencia y Polimorfismo - Cxvs - Versión Final CorregidaElvis Jhon Chacha0% (1)
- Clase 13 I2cDocument80 pagesClase 13 I2cDavid Alejandro Espejo GarciaPas encore d'évaluation
- Control de Posicion de Un Motor de CD Con EncoderDocument6 pagesControl de Posicion de Un Motor de CD Con EncoderDewi Hdez GlezPas encore d'évaluation
- Redes IndustrialesDocument133 pagesRedes IndustrialesJulio Illanes100% (1)
- Tren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadD'EverandTren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadPas encore d'évaluation
- Sistemas memristivos: representación físico-matemática desde la teoría de sistemas dinámicosD'EverandSistemas memristivos: representación físico-matemática desde la teoría de sistemas dinámicosPas encore d'évaluation
- Control Inteligente 10-01Document27 pagesControl Inteligente 10-01abrmchvzPas encore d'évaluation
- Informe de Obra Del Proyecto Florida - 15-02-19Document31 pagesInforme de Obra Del Proyecto Florida - 15-02-19MartinPas encore d'évaluation
- Tarea1163749 16861092391Document10 pagesTarea1163749 16861092391Dayana PibaquePas encore d'évaluation
- Exponentes de Las TGSDocument120 pagesExponentes de Las TGSFAUSTO JAVIER ZAPA PEREZPas encore d'évaluation
- Guía Ejercitación COMUNICACIÓN IDocument6 pagesGuía Ejercitación COMUNICACIÓN IKarollPas encore d'évaluation
- Convocatoria Coordinadoras CipDocument10 pagesConvocatoria Coordinadoras CipCecilia RuizPas encore d'évaluation
- 2620 - Ispf001 Cronograma de MantenimientoDocument3 pages2620 - Ispf001 Cronograma de MantenimientoFIX HOMEPas encore d'évaluation
- La Pedagogía Como Ciencia Cognitiva PDFDocument24 pagesLa Pedagogía Como Ciencia Cognitiva PDFMoy GlezPas encore d'évaluation
- Tema 9 - Seg en Sist App y Big DataDocument44 pagesTema 9 - Seg en Sist App y Big DataSweet DreamsPas encore d'évaluation
- Desktops HP y Compaq - Especificaciones de La Placa Base MCP61PM-HM (Nettle) - Soporte Al Cliente de HP®Document6 pagesDesktops HP y Compaq - Especificaciones de La Placa Base MCP61PM-HM (Nettle) - Soporte Al Cliente de HP®JavCaHuPas encore d'évaluation
- Template Guia Aprendizaje 2019Document13 pagesTemplate Guia Aprendizaje 2019Piter HecPas encore d'évaluation
- Cursos Community Manager - Unidad 2Document12 pagesCursos Community Manager - Unidad 2Engels CruzPas encore d'évaluation
- Activos Tangibles e Intangibles.Document28 pagesActivos Tangibles e Intangibles.Ottoniel CG100% (1)
- Capitulo 5 IngenieriaDocument65 pagesCapitulo 5 IngenieriaThomas RamirezPas encore d'évaluation
- ProbabilidadDocument4 pagesProbabilidadAnonymous HJ13AUYR67% (3)
- Entregable 1 CALIDAD TOTALDocument8 pagesEntregable 1 CALIDAD TOTALninaaldahirPas encore d'évaluation
- Plame PDT PlazosDocument40 pagesPlame PDT PlazosJESUS ANTONIO RAMOS MORONPas encore d'évaluation
- Formato A1 - Análisis de Riesgos de Incendio-AutomáticaDocument100 pagesFormato A1 - Análisis de Riesgos de Incendio-AutomáticaFRANKLIN TENECELAPas encore d'évaluation
- Sustentación de Proyecto-Taller Gráfica II-Rosmery Torre EspinozaDocument5 pagesSustentación de Proyecto-Taller Gráfica II-Rosmery Torre EspinozaCielo BrizaPas encore d'évaluation
- Protocolo Pruebas Fat Baker P1272Document9 pagesProtocolo Pruebas Fat Baker P1272El Aro De La CallePas encore d'évaluation
- Ficha Tecnica Atel Tte175-2Document1 pageFicha Tecnica Atel Tte175-2DIEGO HERNAN PALACIO GILPas encore d'évaluation
- Aplicación de Los Explosivos en La Ingeniería Civil y MilitarDocument3 pagesAplicación de Los Explosivos en La Ingeniería Civil y MilitarCamilo Franco ForeroPas encore d'évaluation
- 3.4.6 Packet Tracer - Configure Vlans and Trunking - Physical Mode - Es XLDocument8 pages3.4.6 Packet Tracer - Configure Vlans and Trunking - Physical Mode - Es XLRaul PiedyPas encore d'évaluation
- Doblador PDFDocument1 pageDoblador PDFrpertuzPas encore d'évaluation
- Ponencia 1, Internet y DerechoDocument22 pagesPonencia 1, Internet y Derechokeko242Pas encore d'évaluation
- 3148 Pva 63a Plus Manual Rev08Document2 pages3148 Pva 63a Plus Manual Rev08marceloPas encore d'évaluation
- Hoja de Ruta 3 Egb ADocument3 pagesHoja de Ruta 3 Egb Ajess gualotuñaPas encore d'évaluation
- Cronograma de Obra GANTTDocument6 pagesCronograma de Obra GANTTJean Piero ChoquezPas encore d'évaluation
- 10.1.1.13 Lab - Configuring OSPFv2 On A Multiaccess NetworkDocument13 pages10.1.1.13 Lab - Configuring OSPFv2 On A Multiaccess NetworkErid RocaPas encore d'évaluation
- Cloma 2020 158 - R0Document16 pagesCloma 2020 158 - R0Odilon AguilarPas encore d'évaluation