Vous aimerez peut-être aussi
- Semi-Analytical Solution of 2-D Elasticity Problems by The Strip Distributed Transfer Function MethodDocument23 pagesSemi-Analytical Solution of 2-D Elasticity Problems by The Strip Distributed Transfer Function MethodGabriel SaavedraPas encore d'évaluation
- Efg 1Document41 pagesEfg 1malenenivamsiPas encore d'évaluation
- Journal of Computational Physics: K. Lipnikov, G. ManziniDocument26 pagesJournal of Computational Physics: K. Lipnikov, G. ManzinidwstephensPas encore d'évaluation
- Finite Element MethodDocument37 pagesFinite Element Methodaditya2053Pas encore d'évaluation
- Time Domain Spectral Element Fast Solver For Piezoelectric StructuresDocument10 pagesTime Domain Spectral Element Fast Solver For Piezoelectric StructuresRamyPas encore d'évaluation
- 108 MohanDocument10 pages108 MohanRECEP BAŞPas encore d'évaluation
- (Doi 10.1016/j.finel.2004.10.007) Yao Weian Hui Wang - Virtual Boundary Element Integral Method For 2-D Piezoelectric MediaDocument17 pages(Doi 10.1016/j.finel.2004.10.007) Yao Weian Hui Wang - Virtual Boundary Element Integral Method For 2-D Piezoelectric MediaSaiful AhmadPas encore d'évaluation
- Finite Elements Approaches in The Solution of Field Functions in Multidimensional Space: A Case of Boundary Value ProblemsDocument31 pagesFinite Elements Approaches in The Solution of Field Functions in Multidimensional Space: A Case of Boundary Value Problemscaojin259Pas encore d'évaluation
- 7 J.S. Kushawaha - Galerkin Method - PP 39-43Document6 pages7 J.S. Kushawaha - Galerkin Method - PP 39-43nemat6064Pas encore d'évaluation
- 1994 A New Implementation of The Element Free Galerkin MethodDocument18 pages1994 A New Implementation of The Element Free Galerkin MethodHridya LalPas encore d'évaluation
- A Moving Finite Element Method For Magnetotelluric Modeling: Bryan JDocument12 pagesA Moving Finite Element Method For Magnetotelluric Modeling: Bryan JsusisoburPas encore d'évaluation
- Frequency Domain Analysis of Continuous - FasanaDocument18 pagesFrequency Domain Analysis of Continuous - FasanaPietro TestaPas encore d'évaluation
- Three-Dimensional Orthogonal Vector Basis Functions For Time-Domain Finite Element Solution of Vector Wave EquationsDocument8 pagesThree-Dimensional Orthogonal Vector Basis Functions For Time-Domain Finite Element Solution of Vector Wave Equationsimranismail08Pas encore d'évaluation
- An Introduction To Finite Element Methods: Jass 05 Seminar: Interplay of Mathematical Modeling and Numerical SimulationDocument16 pagesAn Introduction To Finite Element Methods: Jass 05 Seminar: Interplay of Mathematical Modeling and Numerical Simulationaviraj2006Pas encore d'évaluation
- Finite Element MethodDocument15 pagesFinite Element MethodLeo Lonardelli0% (1)
- Computation Ef Electric Field Using FEM AproachDocument50 pagesComputation Ef Electric Field Using FEM Aproachivan(D3)Pas encore d'évaluation
- QM Meshes 1986Document20 pagesQM Meshes 1986TimKellerPas encore d'évaluation
- MAXWELL'S DISCRETEDocument14 pagesMAXWELL'S DISCRETEIulian CurcaPas encore d'évaluation
- Finite Element Methods Final PDFDocument25 pagesFinite Element Methods Final PDFSHERWIN MOSOMOSPas encore d'évaluation
- Efg 1Document41 pagesEfg 1Vivek PremjiPas encore d'évaluation
- Finite Element MethodDocument17 pagesFinite Element MethodwaveletPas encore d'évaluation
- Finite Element MethodDocument10 pagesFinite Element MethodRaimundo CaballeroPas encore d'évaluation
- Ale Method FsiDocument29 pagesAle Method FsiAlexander NarváezPas encore d'évaluation
- Modeling Elastic Wave Propagation in Waveguides With The Finite ElementDocument10 pagesModeling Elastic Wave Propagation in Waveguides With The Finite ElementAshwini PavankumarPas encore d'évaluation
- Smo1264 ImortantDocument15 pagesSmo1264 ImortantalgwaalPas encore d'évaluation
- DGFDFDDocument8 pagesDGFDFDjs9999Pas encore d'évaluation
- Finite Element Maxwell's EquationsDocument6 pagesFinite Element Maxwell's EquationsHFdzAlPas encore d'évaluation
- A Mixed Finite Element For Interlaminar Stress Computation: Yi-Bing ShiDocument10 pagesA Mixed Finite Element For Interlaminar Stress Computation: Yi-Bing ShiR Vignesh BabuPas encore d'évaluation
- Finite Element MethodDocument15 pagesFinite Element MethodjosgauPas encore d'évaluation
- Further Developments On GMLS: Plates On Elastic FoundationDocument6 pagesFurther Developments On GMLS: Plates On Elastic FoundationChristian ZoundjiPas encore d'évaluation
- Boundary Enforcement in Meshfree Methods Using IMLSDocument5 pagesBoundary Enforcement in Meshfree Methods Using IMLSenatt2012100% (1)
- Free Vibration Studies Using Galerkin's Finite Element MethodDocument14 pagesFree Vibration Studies Using Galerkin's Finite Element MethodPrashant BhattPas encore d'évaluation
- Analysis of Electromagnetic Field Effects Using FEM For Transmission Lines TranspositionDocument5 pagesAnalysis of Electromagnetic Field Effects Using FEM For Transmission Lines TranspositionFelipe BelarminoPas encore d'évaluation
- Applied Mathematics and Mechanics: (English Edition)Document10 pagesApplied Mathematics and Mechanics: (English Edition)asifiqbal84Pas encore d'évaluation
- Finite Element MethodDocument14 pagesFinite Element Methods parasdPas encore d'évaluation
- Current Distribution in A Thin WireDocument16 pagesCurrent Distribution in A Thin Wirenaresh21apr1989Pas encore d'évaluation
- Lakner 2008Document6 pagesLakner 2008M.SerranoPas encore d'évaluation
- Finite-Element Method For Elastic Wave PropagationDocument10 pagesFinite-Element Method For Elastic Wave Propagationbahar1234Pas encore d'évaluation
- Simple Mesh Generator in MATLAB Generates High-Quality MeshesDocument17 pagesSimple Mesh Generator in MATLAB Generates High-Quality MeshesBubblez PatPas encore d'évaluation
- Application Tensor Analysis FemDocument12 pagesApplication Tensor Analysis FemJohn David ReaverPas encore d'évaluation
- Exact Integration of Polynomial-Exponential Products With Application To Wave-Based Numerical MethodsDocument10 pagesExact Integration of Polynomial-Exponential Products With Application To Wave-Based Numerical MethodsAishwaryaPas encore d'évaluation
- Periodic Smoothing Splines For Fft-Based Solvers: SciencedirectDocument22 pagesPeriodic Smoothing Splines For Fft-Based Solvers: Sciencedirectjack.torrance.kingPas encore d'évaluation
- Matlab Differentiation Matrix SuiteDocument55 pagesMatlab Differentiation Matrix SuiteRaghav VenkatPas encore d'évaluation
- Recent Developments in Computational Fracture Mechanics at CardiffDocument5 pagesRecent Developments in Computational Fracture Mechanics at CardiffSatya kaliprasad vangaraPas encore d'évaluation
- 3D Morphing Without User Interaction: Submitted To Eurographics Symposium On Geometry Processing (2004)Document10 pages3D Morphing Without User Interaction: Submitted To Eurographics Symposium On Geometry Processing (2004)tsigelakistisPas encore d'évaluation
- "Fictitious Crack Mode, by Hillerborg 1976Document11 pages"Fictitious Crack Mode, by Hillerborg 1976Ali FadhilPas encore d'évaluation
- A Novel FDTD Application Featuring Openmp-Mpi Hybrid ParallelizationDocument12 pagesA Novel FDTD Application Featuring Openmp-Mpi Hybrid ParallelizationAshish VermaPas encore d'évaluation
- Vibration AnalysisDocument17 pagesVibration AnalysispmagrawalPas encore d'évaluation
- Cho-1994-The Construction of Double-Ended Classical TrajectoriesDocument12 pagesCho-1994-The Construction of Double-Ended Classical TrajectoriesISPas encore d'évaluation
- TH 122ISMEConference2003Document10 pagesTH 122ISMEConference2003Krishna SinghPas encore d'évaluation
- Meshfree Shape Function From Moving Least SquareDocument13 pagesMeshfree Shape Function From Moving Least SquareJeetender Singh KushawahaPas encore d'évaluation
- Spectral element method lecture notesDocument42 pagesSpectral element method lecture notesFaresPas encore d'évaluation
- Progress in Electromagnetics Research M, Vol. 7, 109-122, 2009Document14 pagesProgress in Electromagnetics Research M, Vol. 7, 109-122, 2009Naveed AslamPas encore d'évaluation
- On The Computation of The Dispersion Diagram of Symmetric One-Dimensionally Periodic StructuresDocument15 pagesOn The Computation of The Dispersion Diagram of Symmetric One-Dimensionally Periodic StructuresRajulapati VinodkumarPas encore d'évaluation
- A General Finite Difference Method For Arbitrary MeshesDocument13 pagesA General Finite Difference Method For Arbitrary MeshesKemer NogueraPas encore d'évaluation
- Basic Structured Grid Generation: With an introduction to unstructured grid generationD'EverandBasic Structured Grid Generation: With an introduction to unstructured grid generationPas encore d'évaluation
- Method of Moments for 2D Scattering Problems: Basic Concepts and ApplicationsD'EverandMethod of Moments for 2D Scattering Problems: Basic Concepts and ApplicationsPas encore d'évaluation
- Operators Between Sequence Spaces and ApplicationsD'EverandOperators Between Sequence Spaces and ApplicationsPas encore d'évaluation
- Difference Equations in Normed Spaces: Stability and OscillationsD'EverandDifference Equations in Normed Spaces: Stability and OscillationsPas encore d'évaluation
- Meshfree Approximation With M: Lecture VI: Nonlinear Problems: Nash Iteration and Implicit SmoothingDocument77 pagesMeshfree Approximation With M: Lecture VI: Nonlinear Problems: Nash Iteration and Implicit Smoothingenatt2012Pas encore d'évaluation
- Magnetization Curve Modelling of Soft Magnetic Alloys PDFDocument7 pagesMagnetization Curve Modelling of Soft Magnetic Alloys PDFenatt2012Pas encore d'évaluation
- 15 PDFDocument5 pages15 PDFenatt2012Pas encore d'évaluation
- Overview of Meshless Methods Rodger PDFDocument4 pagesOverview of Meshless Methods Rodger PDFenatt2012Pas encore d'évaluation
- 0000zzz3 PDFDocument99 pages0000zzz3 PDFenatt2012Pas encore d'évaluation
- 3DStress PDFDocument4 pages3DStress PDFenatt2012Pas encore d'évaluation
- Magnetization Curve Modelling of Soft Magnetic Alloys PDFDocument7 pagesMagnetization Curve Modelling of Soft Magnetic Alloys PDFenatt2012Pas encore d'évaluation
- Boundary Enforcement in Meshfree Methods Using IMLSDocument5 pagesBoundary Enforcement in Meshfree Methods Using IMLSenatt2012100% (1)
- Quality ManagementDocument53 pagesQuality ManagementJoy pee100% (2)
- Asif Akhter CISA ITILv3 Senior Manager Info Sec PakistanDocument5 pagesAsif Akhter CISA ITILv3 Senior Manager Info Sec PakistanaamirsaleemPas encore d'évaluation
- Paulo DimaapiDocument10 pagesPaulo DimaapiJustine Policarpio MacatoPas encore d'évaluation
- HTML5 Document For ActivityDocument7 pagesHTML5 Document For ActivityCristian Parra VargasPas encore d'évaluation
- Counter-Strike: Game Version: GeneralDocument5 pagesCounter-Strike: Game Version: GeneralAkash KumarPas encore d'évaluation
- SDP Deep DiveDocument15 pagesSDP Deep DivenscintaPas encore d'évaluation
- Data ..Analysis .Report: Mira K. DesaiDocument18 pagesData ..Analysis .Report: Mira K. DesaiAlfred CobarianPas encore d'évaluation
- Hechethorn - The Secret Societies of All Ages and Countries, Vol. I (1875) PDFDocument417 pagesHechethorn - The Secret Societies of All Ages and Countries, Vol. I (1875) PDFsongpoetPas encore d'évaluation
- Informatica Aggregator and Expression Transformations GuideDocument68 pagesInformatica Aggregator and Expression Transformations GuideMiguel Angel HernandezPas encore d'évaluation
- Maintain Exchange Rates SAPDocument13 pagesMaintain Exchange Rates SAPPradip ShelarPas encore d'évaluation
- Oracle EBS R12 General Ledger-TRAININGDocument707 pagesOracle EBS R12 General Ledger-TRAININGKodwoP80% (5)
- AD Delegation Best PracticesDocument6 pagesAD Delegation Best Practicessubbu4789Pas encore d'évaluation
- WAD CyanideDocument1 pageWAD CyanideJorge RiveraPas encore d'évaluation
- Technical Note - Enterprise Data Quality Features DOC1061691Document30 pagesTechnical Note - Enterprise Data Quality Features DOC1061691SukheshPas encore d'évaluation
- Curve Fitting Ammonia-Water Mixture PropertiesDocument18 pagesCurve Fitting Ammonia-Water Mixture PropertiesSandro GoisisPas encore d'évaluation
- Excel FormulaeDocument564 pagesExcel Formulaesatish kumarPas encore d'évaluation
- Blood, Sweet and TearsDocument4 pagesBlood, Sweet and TearsSapphire SteelePas encore d'évaluation
- Transmission Analysis of A Single Hop For Microwave LinkDocument36 pagesTransmission Analysis of A Single Hop For Microwave LinkMastan Vali0% (1)
- ETSI TS 102 226: Smart Cards Remote APDU Structure For UICC Based Applications (Release 11)Document45 pagesETSI TS 102 226: Smart Cards Remote APDU Structure For UICC Based Applications (Release 11)Kile MatersonPas encore d'évaluation
- Encoder DecoderDocument6 pagesEncoder Decodermarkcelis1Pas encore d'évaluation
- Asynchronous FIFO v6.1: DS232 November 11, 2004 Product SpecificationDocument12 pagesAsynchronous FIFO v6.1: DS232 November 11, 2004 Product SpecificationMahesh Goud PogakulaPas encore d'évaluation
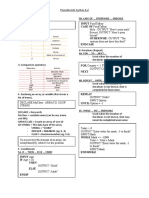
- Pseudocode Syntax CheatsheetDocument1 pagePseudocode Syntax CheatsheetDeadBunny100% (1)
- Dynamic Transient Analysis in Predicting Disc Brake SquealDocument1 pageDynamic Transient Analysis in Predicting Disc Brake SquealantonytechnoPas encore d'évaluation
- LLD Template 7april05Document170 pagesLLD Template 7april05gautamckumarPas encore d'évaluation
- LP-1 Intro ENDocument21 pagesLP-1 Intro ENm_michael_cPas encore d'évaluation
- 30-60-90 Day Plan Example-21604Document2 pages30-60-90 Day Plan Example-21604Brenda SaliraPas encore d'évaluation
- Chapter 8 Communication Management - AnswersDocument4 pagesChapter 8 Communication Management - AnswersnsadnanPas encore d'évaluation
- Ultrapsionics PDFDocument8 pagesUltrapsionics PDFcesargnomoPas encore d'évaluation
- Lip and Groove Design Made Easy With SOLIDWORKSDocument12 pagesLip and Groove Design Made Easy With SOLIDWORKSIonut-Catalin DimachePas encore d'évaluation
- NP CompleteDocument32 pagesNP CompleteSabaniPas encore d'évaluation