Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Etrade Bank-StatementDocument5 pagesEtrade Bank-StatementMark Galanty100% (4)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- ISO 27001 Gap Analysis ChecklistDocument6 pagesISO 27001 Gap Analysis Checklistlijo jacob70% (10)
- Komatsu Wheel Loaders Wa250pz 5 Shop ManualDocument20 pagesKomatsu Wheel Loaders Wa250pz 5 Shop Manualmarcia100% (48)
- Toyota Motor Manufacturing (TMM)Document20 pagesToyota Motor Manufacturing (TMM)Lekha ShahPas encore d'évaluation
- The Child and Adolescent Learners and Learning PrinciplesDocument8 pagesThe Child and Adolescent Learners and Learning PrinciplesAragon KhailPas encore d'évaluation
- Dubai Holding FactsheetDocument2 pagesDubai Holding FactsheetHarley soulPas encore d'évaluation
- Role of Optimizer in Neural NetworkDocument2 pagesRole of Optimizer in Neural NetworkMuhammad AlianPas encore d'évaluation
- Ipcrf Core Values 2019 - FinalDocument23 pagesIpcrf Core Values 2019 - FinalFrendelyn p. Gador100% (4)
- Astro-Spiri Camp - Chinmaya Vibhooti - Shankar Kumaran PDFDocument10 pagesAstro-Spiri Camp - Chinmaya Vibhooti - Shankar Kumaran PDFShankar KumaranPas encore d'évaluation
- Land SurveyingDocument174 pagesLand SurveyingArifulmakrif Hailee100% (2)
- Industrial ReactorsDocument10 pagesIndustrial ReactorssarahPas encore d'évaluation
- RAMTHA-The Tragedy of Women's EnslavementDocument6 pagesRAMTHA-The Tragedy of Women's EnslavementPetrea Raul AndreiPas encore d'évaluation
- MYP Unit Planner - MathDocument5 pagesMYP Unit Planner - MathMarija CvetkovicPas encore d'évaluation
- Prop Pro 32-4 FinalDocument32 pagesProp Pro 32-4 FinalAhmed Ali KhanPas encore d'évaluation
- BSBPMG632 Manage Program RiskDocument221 pagesBSBPMG632 Manage Program RiskgurpreetPas encore d'évaluation
- Unit 9: Cities of The World I. ObjectivesDocument4 pagesUnit 9: Cities of The World I. ObjectivesTrang Hoang NguyenPas encore d'évaluation
- Gma 5013Document10 pagesGma 5013janurtpatPas encore d'évaluation
- IN804 UV-VIS Nomenclature and UnitsDocument5 pagesIN804 UV-VIS Nomenclature and UnitsAnurak OnnnoomPas encore d'évaluation
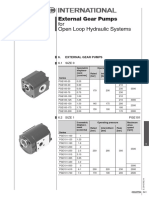
- External Gear Pumps For Open Loop Hydraulic SystemsDocument2 pagesExternal Gear Pumps For Open Loop Hydraulic SystemsBlashko GjorgjievPas encore d'évaluation
- Approaches To Curriculum DesigningDocument20 pagesApproaches To Curriculum DesigningCristel CatapangPas encore d'évaluation
- Digital Thermometer Using Arduino: Mini Project Report ONDocument5 pagesDigital Thermometer Using Arduino: Mini Project Report ONNeha PintoPas encore d'évaluation
- HPB Brochure 0708Document12 pagesHPB Brochure 0708musaluddinPas encore d'évaluation
- Winter Student Enrichment PacketDocument9 pagesWinter Student Enrichment PacketshelleyallynPas encore d'évaluation
- Daerah Penyebaran, Populasi Dan Habitat Paku Pohon (Cyathea Spp. Dan Dicksonia SPP.) DI BALI (Distribution, Population and Habitat ofDocument12 pagesDaerah Penyebaran, Populasi Dan Habitat Paku Pohon (Cyathea Spp. Dan Dicksonia SPP.) DI BALI (Distribution, Population and Habitat ofHyungiePas encore d'évaluation
- Jesper Kyd - Flight Over Venice (Assassin's Creed II)Document9 pagesJesper Kyd - Flight Over Venice (Assassin's Creed II)Aldert de VriesPas encore d'évaluation
- Open National Abacus Competition 2021 - Maats PVT LTDDocument8 pagesOpen National Abacus Competition 2021 - Maats PVT LTDRanjana GalphadePas encore d'évaluation
- Jaquar Sanitarywares PricelistDocument8 pagesJaquar Sanitarywares PricelistAnil KumarPas encore d'évaluation
- Erp Case StudyDocument19 pagesErp Case StudyMøÑïkå Shàrmå100% (1)
- ReadMeCS5 OptionalPluginDocument6 pagesReadMeCS5 OptionalPluginLuismanuel LuisPas encore d'évaluation
- Press Releases Are Not A PR Strategy An Executive Annas ArchiveDocument200 pagesPress Releases Are Not A PR Strategy An Executive Annas Archivehelenajosemacuacua31Pas encore d'évaluation