Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- A Reactance ModulatorDocument17 pagesA Reactance ModulatorAldrin Sagum100% (1)
- SG 2145Document4 pagesSG 2145Fathur Rozak100% (1)
- Compact Broadband Coplanar Capacitive Coupled Probe Fed Microstrip Antenna For Wireless ApplicationsDocument5 pagesCompact Broadband Coplanar Capacitive Coupled Probe Fed Microstrip Antenna For Wireless ApplicationsthejasgvPas encore d'évaluation
- Harmonic Distortion in Power Stations Due To FerroresonanceDocument4 pagesHarmonic Distortion in Power Stations Due To FerroresonanceSunil KumarPas encore d'évaluation
- Ec8451 - Electromagnetic Fields Course OutcomesDocument28 pagesEc8451 - Electromagnetic Fields Course OutcomesdonavallishanmukasaiPas encore d'évaluation
- CMP200DR Service - 2016.02.16Document301 pagesCMP200DR Service - 2016.02.16Jayson LopezPas encore d'évaluation
- Objectives: To Learn The Fundamentals of Inductors and Varactors For RF CMOS Circuits, To LearnDocument13 pagesObjectives: To Learn The Fundamentals of Inductors and Varactors For RF CMOS Circuits, To LearnHubert Ekow AttahPas encore d'évaluation
- Linkwitz Riley Crossovers PrimerDocument14 pagesLinkwitz Riley Crossovers Primeruh8spam2junk1Pas encore d'évaluation
- How To Replace AO Smith Motor Parts - OverviewDocument9 pagesHow To Replace AO Smith Motor Parts - OverviewLuis MartínezPas encore d'évaluation
- BootstrapDocument11 pagesBootstrapKidus DawitPas encore d'évaluation
- Set-3s - Sample Medical Selection Test Paper - 2024-2025 - Final (Medical-Hindi& English)Document24 pagesSet-3s - Sample Medical Selection Test Paper - 2024-2025 - Final (Medical-Hindi& English)kkomalyadav06Pas encore d'évaluation
- PDK 205481 KW26-S5-FSE-4Q enDocument83 pagesPDK 205481 KW26-S5-FSE-4Q enRoberto SacotoPas encore d'évaluation
- Skyper 32 R L6100102Document16 pagesSkyper 32 R L6100102rzamodzkiPas encore d'évaluation
- A Comparison Between LDPE and HDPE Cable Insulation Properties Following Lightning Impulse AgeingDocument4 pagesA Comparison Between LDPE and HDPE Cable Insulation Properties Following Lightning Impulse AgeingGilang Satria PasekaPas encore d'évaluation
- Index: A. About KielDocument73 pagesIndex: A. About KieldileeppatraPas encore d'évaluation
- Service Manual: NSX-R14Document51 pagesService Manual: NSX-R14Roiser DelgadoPas encore d'évaluation
- Supplier Declaration of ComplianceDocument12 pagesSupplier Declaration of ComplianceBlynic TanPas encore d'évaluation
- LG MS-1146SQP-77520Document33 pagesLG MS-1146SQP-77520Angel FigueroaPas encore d'évaluation
- Module 4 Sesion 1 Temperature and Displacement SensorsDocument39 pagesModule 4 Sesion 1 Temperature and Displacement SensorsManav Jain100% (3)
- Electrostatic Energy HarvestingDocument8 pagesElectrostatic Energy HarvestingSpam MeePas encore d'évaluation
- Lecture 1HV - Basics of High Voltage EngineeringDocument34 pagesLecture 1HV - Basics of High Voltage EngineeringFaizan AhmadPas encore d'évaluation
- List of EquipmentDocument2 pagesList of EquipmentJanel MendozaPas encore d'évaluation
- Touch Sensor ModuleDocument23 pagesTouch Sensor ModulecmdiPas encore d'évaluation
- K305 000 MR 1656 01 A4216 0001 - 1 PDFDocument78 pagesK305 000 MR 1656 01 A4216 0001 - 1 PDFtorrentee5216Pas encore d'évaluation
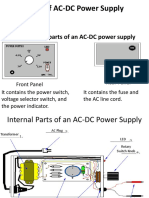
- Internal Parts of An AC-DC Power SupplyDocument14 pagesInternal Parts of An AC-DC Power SupplyBerlin Alcayde25% (12)
- Hvac Syatems, Abu DhabiDocument2 pagesHvac Syatems, Abu DhabiAbhilash JosephPas encore d'évaluation
- Synchronous Condenser en FR DataDocument12 pagesSynchronous Condenser en FR DataGustavo SouzaPas encore d'évaluation
- LB Aw ns12 Tin - enDocument80 pagesLB Aw ns12 Tin - enWaldir Donatti JuniorPas encore d'évaluation
- Elektor in 1985 01Document54 pagesElektor in 1985 01Pedro100% (1)
- Induction Motor Equivalent Circuit For Dynamic SimulationDocument6 pagesInduction Motor Equivalent Circuit For Dynamic Simulationmareymorsy2822Pas encore d'évaluation