Vous aimerez peut-être aussi
- State Estimation TechniquesDocument7 pagesState Estimation TechniquesyuniervPas encore d'évaluation
- Apm 2.5 Block Diagram: I2C PortDocument1 pageApm 2.5 Block Diagram: I2C PortyuniervPas encore d'évaluation
- 2015 - 07 - BreguTesis Reengineering APM PDFDocument99 pages2015 - 07 - BreguTesis Reengineering APM PDFyuniervPas encore d'évaluation
- Apm 2.5 Block Diagram: I2C PortDocument1 pageApm 2.5 Block Diagram: I2C PortyuniervPas encore d'évaluation
- Apm 2.5 Block Diagram: I2C PortDocument1 pageApm 2.5 Block Diagram: I2C PortyuniervPas encore d'évaluation
- APM2 5BlockDiagramDocument40 pagesAPM2 5BlockDiagramyuniervPas encore d'évaluation
- APM2 5BlockDiagramDocument40 pagesAPM2 5BlockDiagramyuniervPas encore d'évaluation
- Integration of INS and GPS using Kalman Filter on mobile phonesDocument7 pagesIntegration of INS and GPS using Kalman Filter on mobile phonesyuniervPas encore d'évaluation
- BDocument448 pagesBJulian AmayaPas encore d'évaluation
- Real-Time Simulation of Ship Motions in WavesDocument10 pagesReal-Time Simulation of Ship Motions in WavesyuniervPas encore d'évaluation
- Filter Kalman Vs ComplementaryDocument20 pagesFilter Kalman Vs ComplementaryDante Fajardo Olmos100% (1)
- Fossen MCMC12 (Perturbaciones) Descarg 2013Document6 pagesFossen MCMC12 (Perturbaciones) Descarg 2013yuniervPas encore d'évaluation
- 1017 Ifaccep96Document9 pages1017 Ifaccep96yuniervPas encore d'évaluation
- GNC ToolboxDocument10 pagesGNC ToolboxyuniervPas encore d'évaluation
- Nonlinear Path Following Control for Autonomous Underwater VehiclesDocument6 pagesNonlinear Path Following Control for Autonomous Underwater VehiclesyuniervPas encore d'évaluation
- PDFDocument7 pagesPDFyuniervPas encore d'évaluation
- Submarine Dynamic ModelingDocument8 pagesSubmarine Dynamic ModelingkooecPas encore d'évaluation
- Nonlinear Path Following With Applications To The Control of Autonomous Underwater VehiclesDocument6 pagesNonlinear Path Following With Applications To The Control of Autonomous Underwater VehiclesyuniervPas encore d'évaluation
- Proportional Valves PDFDocument4 pagesProportional Valves PDFyuniervPas encore d'évaluation
- Correction of Bathymetric Survey Artifacts Resulting Apparent Wave-Induced Vertical Position of An AUVDocument13 pagesCorrection of Bathymetric Survey Artifacts Resulting Apparent Wave-Induced Vertical Position of An AUVyuniervPas encore d'évaluation
- Design of A Sliding Mode Fuzzy Controller For AUVDocument19 pagesDesign of A Sliding Mode Fuzzy Controller For AUVRuchit PathakPas encore d'évaluation
- Sharp GP2 D12 SnrsDocument5 pagesSharp GP2 D12 Snrstienhuybk_ddtPas encore d'évaluation
- Aage PDFDocument6 pagesAage PDFyuniervPas encore d'évaluation
- De Winter Et Al MB2012 PDFDocument4 pagesDe Winter Et Al MB2012 PDFyuniervPas encore d'évaluation
- Path-Following For Non-Minimum Phase Systems Removes Performance LimitationsDocument6 pagesPath-Following For Non-Minimum Phase Systems Removes Performance LimitationsyuniervPas encore d'évaluation
- MohdRamzanMainal1996 EstimationOf ShipManoeuvringCharacteristics PDFDocument17 pagesMohdRamzanMainal1996 EstimationOf ShipManoeuvringCharacteristics PDFyuniervPas encore d'évaluation
- 00570951Document6 pages00570951yuniervPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Ship or Boat - What's in A Name - National Maritime Historical Society PDFDocument3 pagesShip or Boat - What's in A Name - National Maritime Historical Society PDFShaun JohnsonPas encore d'évaluation
- ABS Bow-Stern Loading-Unloading Guide E-Nov10Document12 pagesABS Bow-Stern Loading-Unloading Guide E-Nov10DanPas encore d'évaluation
- Swashbuckler - Level 1Document1 pageSwashbuckler - Level 1АндрейПраздниковPas encore d'évaluation
- Checklist Pdi UtilitiDocument17 pagesChecklist Pdi UtilitiPulpak GkPas encore d'évaluation
- HMS Hood's Proposed 1942 Large Repair PlansDocument6 pagesHMS Hood's Proposed 1942 Large Repair PlansjdageePas encore d'évaluation
- Nmwebsearch Chart Update Results: Block-Colour Block-ColourDocument3 pagesNmwebsearch Chart Update Results: Block-Colour Block-ColourAshish RanjanPas encore d'évaluation
- De-119959 Vesbsel Conformance RequirementsDocument14 pagesDe-119959 Vesbsel Conformance RequirementsJithuJohnPas encore d'évaluation
- Shipping Container Tracking and Tracing - MSCDocument2 pagesShipping Container Tracking and Tracing - MSCNIKESH PRAKASHPas encore d'évaluation
- Yamaha Motor PDFDocument117 pagesYamaha Motor PDFj J4Pas encore d'évaluation
- Seafisher 2608 Longliner SpecificationDocument2 pagesSeafisher 2608 Longliner SpecificationRoda NiagaPas encore d'évaluation
- Stability Criteria For Sailing Vessels: January 2008Document15 pagesStability Criteria For Sailing Vessels: January 2008Daniel OOWPas encore d'évaluation
- The Open Boat: by Stephen CraneDocument10 pagesThe Open Boat: by Stephen CraneSruthi AnandPas encore d'évaluation
- CMM CL 16 - Onboard Training For Chief Officer's Promotion To MasterDocument5 pagesCMM CL 16 - Onboard Training For Chief Officer's Promotion To Master김순혁Pas encore d'évaluation
- Saipem General 03 15Document74 pagesSaipem General 03 15andriaerospace100% (1)
- Jan Jansen or Janszoon or Jansz Van Haarlem and Anthony (Jansen) Van Salee.Document5 pagesJan Jansen or Janszoon or Jansz Van Haarlem and Anthony (Jansen) Van Salee.PaulVanSicklePas encore d'évaluation
- Sailing Mast RiggingDocument88 pagesSailing Mast RiggingAna Carla Martins80% (5)
- Cat-2 Cargo HandlingDocument1 pageCat-2 Cargo Handlingasvath sureshPas encore d'évaluation
- Bb-02.final Drawing ListDocument21 pagesBb-02.final Drawing ListАлександр Королёв0% (1)
- 1989 Larson Boats BrochureDocument48 pages1989 Larson Boats BrochureTechManuals1997Pas encore d'évaluation
- The Application of Critical Path Method (CPM) Analysis On Traditional Ship Production Process (Case Study: Bintan - Indonesia)Document8 pagesThe Application of Critical Path Method (CPM) Analysis On Traditional Ship Production Process (Case Study: Bintan - Indonesia)Muhammad AkbarPas encore d'évaluation
- MGN 63 Use of Electronic Aids To NavigationDocument9 pagesMGN 63 Use of Electronic Aids To Navigationvn596174Pas encore d'évaluation
- Thong Tin Va Mot So An Pham Cua IMO Duoc Cap Nhat, Sua DoiDocument100 pagesThong Tin Va Mot So An Pham Cua IMO Duoc Cap Nhat, Sua Doivannuipham67Pas encore d'évaluation
- PANAMA COC For Naval PersonnelDocument3 pagesPANAMA COC For Naval PersonnelPayasam Abhilash100% (1)
- Digital Selective CallingDocument3 pagesDigital Selective CallingbookolokoPas encore d'évaluation
- Functional Procedure of Custom ClearanceDocument21 pagesFunctional Procedure of Custom ClearanceShahzad SaifPas encore d'évaluation
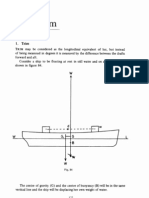
- Ship Stability TrimDocument25 pagesShip Stability Trimhoaithu883Pas encore d'évaluation
- UCS Dredge SystemDocument2 pagesUCS Dredge SystemJean David ChanPas encore d'évaluation
- Lit 18626 06 75 - 1369Document90 pagesLit 18626 06 75 - 1369andysuomi100% (1)
- Quality Modular: Pontoon SystemsDocument20 pagesQuality Modular: Pontoon SystemsMeliany SariPas encore d'évaluation
- Amelia Earhart Essay WordDocument4 pagesAmelia Earhart Essay WordNathanPas encore d'évaluation