Vous aimerez peut-être aussi
- Induction MotorDocument39 pagesInduction MotorAhmed MagdyPas encore d'évaluation
- Induction MotorsDocument14 pagesInduction MotorsAbdul RaheemPas encore d'évaluation
- Induction Motor Modeling - Steady StateDocument43 pagesInduction Motor Modeling - Steady Statedivinelight100% (3)
- Chap 7 Solutions PDFDocument34 pagesChap 7 Solutions PDFIbrahim Hussain100% (1)
- Lec4 Polyphase Induction Motor IIDocument14 pagesLec4 Polyphase Induction Motor IIMohammed Dyhia AliPas encore d'évaluation
- AC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of HelwanDocument25 pagesAC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of Helwanadelelsamahy5958Pas encore d'évaluation
- AC Machine Stator Phases and Induction Motor Rotating Magnetic FieldDocument39 pagesAC Machine Stator Phases and Induction Motor Rotating Magnetic FieldSaneer M SaliPas encore d'évaluation
- Induction Motor (Part 3)Document44 pagesInduction Motor (Part 3)Niha chowdhuryPas encore d'évaluation
- Induction Motors Equivalent CircuitDocument27 pagesInduction Motors Equivalent Circuitk rajendraPas encore d'évaluation
- Three Phase Synchronous MachinesDocument14 pagesThree Phase Synchronous MachinesMohdFirdausPas encore d'évaluation
- Speed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3Document10 pagesSpeed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3rohitkjPas encore d'évaluation
- The Induction Motor: A Detailed Look at Its Operation and CharacteristicsDocument13 pagesThe Induction Motor: A Detailed Look at Its Operation and CharacteristicsAsimPas encore d'évaluation
- ED Lab Manual Original - Exp 1 To Exp 5Document19 pagesED Lab Manual Original - Exp 1 To Exp 5Umang MewaraPas encore d'évaluation
- Everything You Need to Know About Single-Phase MotorsDocument10 pagesEverything You Need to Know About Single-Phase MotorsMohd Jamal Mohd MoktarPas encore d'évaluation
- ELG3311: Assignment 3: Problem 6-12Document15 pagesELG3311: Assignment 3: Problem 6-12Gathy BrayohPas encore d'évaluation
- InductionMotors Gate Material PartBDocument38 pagesInductionMotors Gate Material PartBpraveen6494Pas encore d'évaluation
- ECEG-3132 Electrical Engineering Lab-IV Final Exam Answer KeyDocument4 pagesECEG-3132 Electrical Engineering Lab-IV Final Exam Answer Keyhelen tsegayPas encore d'évaluation
- Induction Motor Chapter: Stator Resistance, Speed, Torque CalculationsDocument5 pagesInduction Motor Chapter: Stator Resistance, Speed, Torque CalculationsGathy BrayohPas encore d'évaluation
- Energy Conversion 17Document10 pagesEnergy Conversion 17krishnareddy_chintalaPas encore d'évaluation
- Induction Motor Construction and OperationDocument23 pagesInduction Motor Construction and OperationDaniyar SeytenovPas encore d'évaluation
- Lab 13 - Wound Rotor Induction MotorDocument6 pagesLab 13 - Wound Rotor Induction MotorJeth MadriagaPas encore d'évaluation
- INDUCTION MOTOR TORQUE-SPEED CURVEDocument10 pagesINDUCTION MOTOR TORQUE-SPEED CURVEprasad243243Pas encore d'évaluation
- Induction Motor Fundamentals PDFDocument37 pagesInduction Motor Fundamentals PDFiorek_22Pas encore d'évaluation
- Test 2 2013 SolutionDocument6 pagesTest 2 2013 SolutionFizah Abdul RahmanPas encore d'évaluation
- Chapter 3 Induction MachineDocument25 pagesChapter 3 Induction MachineWei HanPas encore d'évaluation
- ProjectControl, DC. AnalysisDocument15 pagesProjectControl, DC. AnalysisFir Dauss100% (1)
- Kramer DriveDocument42 pagesKramer DriveSenthil Kumar100% (1)
- Induction Machines ExamplesDocument3 pagesInduction Machines ExamplespqosdPas encore d'évaluation
- EE 205 Lecture 31Document13 pagesEE 205 Lecture 31Akshat SharmaPas encore d'évaluation
- Presentation On Power and Torque of Induction MotorDocument30 pagesPresentation On Power and Torque of Induction MotorNewCandle100% (1)
- Retardation TestDocument5 pagesRetardation TestAnkit Shetty100% (1)
- Three Phase Induction MotorDocument7 pagesThree Phase Induction MotorPradeep Kumar S SPas encore d'évaluation
- Induction MachineDocument48 pagesInduction MachinechethanPas encore d'évaluation
- Energy Conversion 17Document10 pagesEnergy Conversion 17protectionworkPas encore d'évaluation
- Eee 321Document7 pagesEee 321faisal sbennaPas encore d'évaluation
- Induction Motor Drive Control MethodsDocument8 pagesInduction Motor Drive Control MethodsRudra Kumar MishraPas encore d'évaluation
- DC Motors: RLB EDocument6 pagesDC Motors: RLB Ehafiz_jaaffarPas encore d'évaluation
- Induction Machine ReportDocument24 pagesInduction Machine ReportSiddharth NandhanPas encore d'évaluation
- Definition of A DC MotorDocument76 pagesDefinition of A DC MotorKiyoshi Jiro MalinaoPas encore d'évaluation
- Electrical Eng NewDocument141 pagesElectrical Eng NewDianne GawdanPas encore d'évaluation
- EE743 Induction Machines Torque-Speed CharacteristicsDocument22 pagesEE743 Induction Machines Torque-Speed CharacteristicsGogioman Myhay100% (1)
- Induction MachinesDocument82 pagesInduction Machinesanon_386990813Pas encore d'évaluation
- DC MOTORS: HOW THEY WORK AS GENERATORS & MOTORSDocument7 pagesDC MOTORS: HOW THEY WORK AS GENERATORS & MOTORSKelvin LiewPas encore d'évaluation
- Rotating DC Motors Part IIDocument6 pagesRotating DC Motors Part IIOndřej HanákPas encore d'évaluation
- Ac Motors War-MebDocument10 pagesAc Motors War-MebolingxjcPas encore d'évaluation
- Induction MotorDocument6 pagesInduction MotorMuhamad NafianPas encore d'évaluation
- DC MotorsDocument33 pagesDC MotorsVikram SanthoshPas encore d'évaluation
- Doubly Fed Induction Generator For Wind TurbinesDocument21 pagesDoubly Fed Induction Generator For Wind TurbinesAdarsh KailashPas encore d'évaluation
- ASSIGNMENT Elektric q1-q3Document16 pagesASSIGNMENT Elektric q1-q3Nur Aisyah ZainuddinPas encore d'évaluation
- Three Phase Induction Motors 2018Document18 pagesThree Phase Induction Motors 2018phillipkeiron123Pas encore d'évaluation
- EE6365 – ELECTRICAL ENGINEERING LABORATORY MANUALDocument58 pagesEE6365 – ELECTRICAL ENGINEERING LABORATORY MANUALjk100% (1)
- Chapter4 Synchronousmachine 110625084549 Phpapp02Document27 pagesChapter4 Synchronousmachine 110625084549 Phpapp02lerato_lechelaPas encore d'évaluation
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkD'EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkPas encore d'évaluation
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlÉvaluation : 5 sur 5 étoiles5/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Pas encore d'évaluation
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesD'EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesPas encore d'évaluation
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)D'EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Pas encore d'évaluation
- 110 Waveform Generator Projects for the Home ConstructorD'Everand110 Waveform Generator Projects for the Home ConstructorÉvaluation : 4 sur 5 étoiles4/5 (1)
- Variable Speed AC Drives with Inverter Output FiltersD'EverandVariable Speed AC Drives with Inverter Output FiltersPas encore d'évaluation
- Tutorial 1Document1 pageTutorial 1hafiz_jaaffarPas encore d'évaluation
- Synchronous Machine: Generator MotorDocument14 pagesSynchronous Machine: Generator Motorhafiz_jaaffar100% (1)
- Transmission Line ModelsDocument5 pagesTransmission Line Modelshafiz_jaaffarPas encore d'évaluation
- 3.0 Transformers: 3.1 The Ideal TransformerDocument16 pages3.0 Transformers: 3.1 The Ideal Transformerhafiz_jaaffarPas encore d'évaluation
- The Per Unit SystemDocument9 pagesThe Per Unit Systemhafiz_jaaffarPas encore d'évaluation
- DC Motors: RLB EDocument6 pagesDC Motors: RLB Ehafiz_jaaffarPas encore d'évaluation
- Background Theory: Power Engineering OverviewDocument8 pagesBackground Theory: Power Engineering Overviewhafiz_jaaffarPas encore d'évaluation
- Fault Analysis (Short-Circuit Analysis) Definition of FaultDocument4 pagesFault Analysis (Short-Circuit Analysis) Definition of Faulthafiz_jaaffarPas encore d'évaluation
- Real Reactive Apparent PowerDocument10 pagesReal Reactive Apparent Powerhafiz_jaaffarPas encore d'évaluation
- The Voltage Gain WaveformDocument1 pageThe Voltage Gain Waveformhafiz_jaaffarPas encore d'évaluation
- 3 Phase SystemDocument12 pages3 Phase SystemAuji ZaharudinPas encore d'évaluation
- Analysis of Power AmplifierDocument33 pagesAnalysis of Power Amplifierhafiz_jaaffarPas encore d'évaluation
- 05442777Document4 pages05442777hafiz_jaaffarPas encore d'évaluation
- Pspice LabDocument2 pagesPspice Labhafiz_jaaffarPas encore d'évaluation
- Lab Am DetectorDocument2 pagesLab Am Detectorhafiz_jaaffarPas encore d'évaluation
- ELE413Document6 pagesELE413hafiz_jaaffarPas encore d'évaluation
- 2 - SeggianiDocument11 pages2 - Seggianimohammadjm2008Pas encore d'évaluation
- BPCL Volume IIIDocument196 pagesBPCL Volume IIIPaul PhiliphsPas encore d'évaluation
- AQ9D49U Specification SheetDocument1 pageAQ9D49U Specification SheetqqqPas encore d'évaluation
- Lampara PDFDocument2 pagesLampara PDFANTHONY FLORESPas encore d'évaluation
- PPE Question Bank Covers Thermal, Hydro, Nuclear PowerDocument7 pagesPPE Question Bank Covers Thermal, Hydro, Nuclear PowerKanagaraj Chelladurai100% (1)
- Introduction To Energy Technologies For Efficient Power GenerationDocument281 pagesIntroduction To Energy Technologies For Efficient Power GenerationHernan AquinoPas encore d'évaluation
- EU Growatt Catalog ENG 2Document34 pagesEU Growatt Catalog ENG 2JURICA BREKALO ŠTRBIĆPas encore d'évaluation
- Introduction To Technical EnglishDocument8 pagesIntroduction To Technical EnglishFabian DiazPas encore d'évaluation
- IkeaDocument8 pagesIkeaChristine DoxeyPas encore d'évaluation
- WTE - Republic of KoreaDocument11 pagesWTE - Republic of KoreaZaky Abdurrasyid MPas encore d'évaluation
- Fire Industry Foam PumpsDocument4 pagesFire Industry Foam Pumpskhalidwy6342Pas encore d'évaluation
- CEP Power Generation (Fall 2022)Document2 pagesCEP Power Generation (Fall 2022)Jiya NazirPas encore d'évaluation
- 40rusa - 20 Ton CarrierDocument13 pages40rusa - 20 Ton Carriereduardosalas1287Pas encore d'évaluation
- Mineral and Power Resources Class 8 Notes Social Science Geography Chapter 3Document12 pagesMineral and Power Resources Class 8 Notes Social Science Geography Chapter 3MansiPas encore d'évaluation
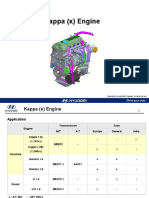
- PB Engine Kappa EngDocument15 pagesPB Engine Kappa EngMoaed Kanbar50% (2)
- Volumetric Reserves EstimatesDocument34 pagesVolumetric Reserves EstimatesmhmdsaalemPas encore d'évaluation
- GeothermalPresentation 1Document30 pagesGeothermalPresentation 1Alfarodo PharasianPas encore d'évaluation
- An Analysis of The CO2 Emission Abatement in Plastic Recycling System Using Life Cycle Assessment (LCA) Methodology: A Case Study of Bandung City, IndonesiaDocument3 pagesAn Analysis of The CO2 Emission Abatement in Plastic Recycling System Using Life Cycle Assessment (LCA) Methodology: A Case Study of Bandung City, IndonesiakrigjsmanPas encore d'évaluation
- KA24/GT24 Gas Turbine AlstomDocument26 pagesKA24/GT24 Gas Turbine AlstomJJPas encore d'évaluation
- Geothermal EnergyDocument19 pagesGeothermal EnergyKanika AgarwalPas encore d'évaluation
- Analysis Mathlab Simulink of A PV System Used ForDocument5 pagesAnalysis Mathlab Simulink of A PV System Used ForAjit MokalPas encore d'évaluation
- Sun Path Analysis and Sun RadiationDocument6 pagesSun Path Analysis and Sun RadiationKah LeongPas encore d'évaluation
- Wind Power Variability ThesisDocument304 pagesWind Power Variability ThesisPablo F. Chacho Ochoa100% (1)
- Hydro Fuel CellDocument48 pagesHydro Fuel CellRoberto Rojas FlorentinoPas encore d'évaluation
- Barilla Solar Thermal Design GuideDocument26 pagesBarilla Solar Thermal Design GuideFarhan MehdiPas encore d'évaluation
- Parts Catalogue For Coolcar A PDFDocument144 pagesParts Catalogue For Coolcar A PDFJavier Amorin100% (1)
- A. B. C. D.: Answer: ExplanationDocument73 pagesA. B. C. D.: Answer: ExplanationUpender DhullPas encore d'évaluation
- Edesign Project2 EastPenn UltraBatteryDocument23 pagesEdesign Project2 EastPenn UltraBatteryredpanda193Pas encore d'évaluation
- High Performance 3-Phase UPS FeaturesDocument3 pagesHigh Performance 3-Phase UPS FeaturesEdwin GarciaPas encore d'évaluation
- Lats Load GHDFGHDocument7 pagesLats Load GHDFGHShaikhMazharAhmedPas encore d'évaluation