Vous aimerez peut-être aussi
- Toyota 1ZZ FE 3ZZ FE Engine Repair Manual RM1099E PDFDocument141 pagesToyota 1ZZ FE 3ZZ FE Engine Repair Manual RM1099E PDFJhorwind Requena87% (15)
- Manage Risks and Seize OpportunitiesDocument5 pagesManage Risks and Seize Opportunitiesamyn_s100% (2)
- Section 06 - Hole CleaningDocument81 pagesSection 06 - Hole CleaningRicardo Villar100% (2)
- Call Center MetricsDocument16 pagesCall Center MetricspratimPas encore d'évaluation
- Fiber Reinforced Plastics & Laminates GuideDocument32 pagesFiber Reinforced Plastics & Laminates GuideMercyJatindroPas encore d'évaluation
- 60-500 KV High Voltage-Gallery PDFDocument33 pages60-500 KV High Voltage-Gallery PDFuzakcilPas encore d'évaluation
- Constraint Aggregation Principle Speeds Up Convex OptimizationDocument21 pagesConstraint Aggregation Principle Speeds Up Convex OptimizationCarlos Eduardo Morales MayhuayPas encore d'évaluation
- Silverwood 2007 ReportDocument23 pagesSilverwood 2007 ReportAbhi RockzzPas encore d'évaluation
- An Electromagnetism-likeMechanism For Global OptimizationDocument20 pagesAn Electromagnetism-likeMechanism For Global OptimizationArman DaliriPas encore d'évaluation
- Modified Hestenes-Stiefel Method for Monotone EquationsDocument14 pagesModified Hestenes-Stiefel Method for Monotone EquationsHAFIZ LAWAL IBRAHIMPas encore d'évaluation
- Mean Shift Algo 3Document5 pagesMean Shift Algo 3ninnnnnnimoPas encore d'évaluation
- 1999 GuntmanDocument29 pages1999 GuntmanFelipeCarraroPas encore d'évaluation
- Local Search in Smooth Convex Sets: CX Ax B A I A A A A A A O D X Ax B X CX CX O A I J Z O Opt D X X C A B P CXDocument9 pagesLocal Search in Smooth Convex Sets: CX Ax B A I A A A A A A O D X Ax B X CX CX O A I J Z O Opt D X X C A B P CXhellothapliyalPas encore d'évaluation
- Advanced Algorithms Course. Lecture Notes. Part 11: Chernoff BoundsDocument4 pagesAdvanced Algorithms Course. Lecture Notes. Part 11: Chernoff BoundsKasapaPas encore d'évaluation
- Inverse Iteration Method For Finding EigenvectorsDocument4 pagesInverse Iteration Method For Finding Eigenvectors王轩Pas encore d'évaluation
- Gmres SiamDocument14 pagesGmres SiamKien NguyenPas encore d'évaluation
- Estimation of Time-Varying Par in STAT Models - Bertsimas Et - Al. (1999) - PUBDocument21 pagesEstimation of Time-Varying Par in STAT Models - Bertsimas Et - Al. (1999) - PUBWaisak Purnomo HPas encore d'évaluation
- Quantum Data-Fitting: PACS Numbers: 03.67.-A, 03.67.ac, 42.50.DvDocument6 pagesQuantum Data-Fitting: PACS Numbers: 03.67.-A, 03.67.ac, 42.50.Dvohenri100Pas encore d'évaluation
- X IR T TDocument8 pagesX IR T TgiantsssPas encore d'évaluation
- Opt Switch CDC 04Document6 pagesOpt Switch CDC 04menilanjan89nLPas encore d'évaluation
- Kernal Methods Machine LearningDocument53 pagesKernal Methods Machine LearningpalaniPas encore d'évaluation
- A Binary Percentile Sin-Cosine Optimisation Algorithm Applied To The Set Covering ProblemDocument11 pagesA Binary Percentile Sin-Cosine Optimisation Algorithm Applied To The Set Covering ProblemSrini vasPas encore d'évaluation
- General Least Squares Smoothing and Differentiation of Nonuniformly Spaced Data by The Convolution Method.Document3 pagesGeneral Least Squares Smoothing and Differentiation of Nonuniformly Spaced Data by The Convolution Method.Vladimir PelekhatyPas encore d'évaluation
- Linear EquationDocument9 pagesLinear Equationsam_kamali85Pas encore d'évaluation
- Ridge 3Document4 pagesRidge 3manishnegiiPas encore d'évaluation
- Learning Fuzzy Control Laws For The Inverted Pendulum: X X X U M' X X X X M M X X X G X X U M'X X M M ' M X M MDocument4 pagesLearning Fuzzy Control Laws For The Inverted Pendulum: X X X U M' X X X X M M X X X G X X U M'X X M M ' M X M MMario ArelaPas encore d'évaluation
- Basic PRAM Algorithm Design TechniquesDocument13 pagesBasic PRAM Algorithm Design TechniquessandeeprosePas encore d'évaluation
- Another Look at The 9 ,'longest Ascending Subsequence" ProblemDocument5 pagesAnother Look at The 9 ,'longest Ascending Subsequence" ProblemP6E7P7Pas encore d'évaluation
- Chen1996A Class of Smoothing Functions For Nonlinear and MixedDocument42 pagesChen1996A Class of Smoothing Functions For Nonlinear and MixedKhaled BeheryPas encore d'évaluation
- Christophe Andrieu - Arnaud Doucet Bristol, BS8 1TW, UK. Cambridge, CB2 1PZ, UK. EmailDocument4 pagesChristophe Andrieu - Arnaud Doucet Bristol, BS8 1TW, UK. Cambridge, CB2 1PZ, UK. EmailNeil John AppsPas encore d'évaluation
- Applications and Benefits of Elliptic Curve CryptographyDocument11 pagesApplications and Benefits of Elliptic Curve CryptographyShahriman Dan DianaPas encore d'évaluation
- (Gholampour Et Al., 2011) A Time Stepping Method in Analysis of Nonlinear Structural DynamicsDocument8 pages(Gholampour Et Al., 2011) A Time Stepping Method in Analysis of Nonlinear Structural DynamicsJose ManuelPas encore d'évaluation
- An Algorithm For Set Covering ProblemDocument9 pagesAn Algorithm For Set Covering ProblemdewyekhaPas encore d'évaluation
- Observations On An Adaptive Moving Grid Method ForDocument14 pagesObservations On An Adaptive Moving Grid Method ForHermmite BessePas encore d'évaluation
- A Feasible Directions Method For Nonsmooth Convex OptimizationDocument15 pagesA Feasible Directions Method For Nonsmooth Convex OptimizationWiliams Cernades GomezPas encore d'évaluation
- Even Faster Integer Multiplication: July 11, 2014Document28 pagesEven Faster Integer Multiplication: July 11, 2014abcddddsef1234Pas encore d'évaluation
- Updating Formulae and A Pairwise Algorithm For Computing Sample VariancesDocument22 pagesUpdating Formulae and A Pairwise Algorithm For Computing Sample VariancesDimas YudhistiraPas encore d'évaluation
- Wolfe, Markov Chain in Linear ProgrammingDocument10 pagesWolfe, Markov Chain in Linear Programmingcarlitos11evildarkPas encore d'évaluation
- The Penalty Function Method for Constrained OptimisationDocument22 pagesThe Penalty Function Method for Constrained Optimisationtamann2004Pas encore d'évaluation
- Global convergence of trust-region SQP filter algorithmDocument25 pagesGlobal convergence of trust-region SQP filter algorithmAndressa PereiraPas encore d'évaluation
- Nonlinear Optimization Using the Generalized Reduced Gradient MethodDocument63 pagesNonlinear Optimization Using the Generalized Reduced Gradient MethodPaulo Bruno100% (1)
- Optimization Transfer Algorithms in StatisticsDocument29 pagesOptimization Transfer Algorithms in StatisticsKhông Còn Phù HợpPas encore d'évaluation
- Improving The Accuracy of Computed Eigenvalues and EigenvectorsDocument23 pagesImproving The Accuracy of Computed Eigenvalues and EigenvectorsFilipe AmaroPas encore d'évaluation
- Advanced Algorithms Course. Lecture Notes. Part 9: 3-SAT: How To Satisfy Most ClausesDocument4 pagesAdvanced Algorithms Course. Lecture Notes. Part 9: 3-SAT: How To Satisfy Most ClausesKasapaPas encore d'évaluation
- Prony Method For ExponentialDocument21 pagesProny Method For ExponentialsoumyaPas encore d'évaluation
- Square Rooting Algorithms for Integer and Floating-Point NumbersDocument5 pagesSquare Rooting Algorithms for Integer and Floating-Point NumbersJayaram KumarPas encore d'évaluation
- VNS for Probabilistic SatisfiabilityDocument6 pagesVNS for Probabilistic Satisfiabilitysk8888888Pas encore d'évaluation
- More Approximation Algorithms Based On Linear Programming: Exercise 1. Show That MDocument9 pagesMore Approximation Algorithms Based On Linear Programming: Exercise 1. Show That MPritish PradhanPas encore d'évaluation
- Lec3 PDFDocument9 pagesLec3 PDFyacp16761Pas encore d'évaluation
- Finite Fields and String MatchingDocument11 pagesFinite Fields and String MatchingamacfiesPas encore d'évaluation
- Nonlinear Least SQ: Queensland 4001, AustraliaDocument17 pagesNonlinear Least SQ: Queensland 4001, AustraliaAbdul AzizPas encore d'évaluation
- Generalized Pattern Search Methods For A Class of Nonsmooth Optimization Problems With Structure - Bogani (2008)Document11 pagesGeneralized Pattern Search Methods For A Class of Nonsmooth Optimization Problems With Structure - Bogani (2008)Emerson ButynPas encore d'évaluation
- Robust Simulations of Turing MachinesDocument10 pagesRobust Simulations of Turing MachinesAeneas WoodPas encore d'évaluation
- Foundations Computational Mathematics: Online Learning AlgorithmsDocument26 pagesFoundations Computational Mathematics: Online Learning AlgorithmsYuan YaoPas encore d'évaluation
- A Parallel Algorithm For Constrained Optimization ProblemsDocument6 pagesA Parallel Algorithm For Constrained Optimization Problemssami_aldalahmehPas encore d'évaluation
- Integer Factorization Algorithms: Connelly BarnesDocument17 pagesInteger Factorization Algorithms: Connelly BarnesRubens Vilhena FonsecaPas encore d'évaluation
- Neural Networks Give A Warm Start To Linear Optimization ProblemsDocument6 pagesNeural Networks Give A Warm Start To Linear Optimization ProblemsAhmed HussainPas encore d'évaluation
- Convergence Acceleration of Alternating SeriesDocument10 pagesConvergence Acceleration of Alternating SeriesblablityPas encore d'évaluation
- Computing Cylindrical Algebraic Decomposition via Triangular DecompositionDocument21 pagesComputing Cylindrical Algebraic Decomposition via Triangular DecompositionMohan Kumar100% (1)
- A Modified Conjugate Gradient Formula For Back Propagation Neural Network Algorithm-LibreDocument8 pagesA Modified Conjugate Gradient Formula For Back Propagation Neural Network Algorithm-LibreedrianhadinataPas encore d'évaluation
- Matching control laws stabilize ball and beam systemDocument7 pagesMatching control laws stabilize ball and beam systemAlbana OxaPas encore d'évaluation
- Find Maximum Element Index in ArrayDocument6 pagesFind Maximum Element Index in Arraysiddharth1kPas encore d'évaluation
- INFORMS Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To Operations ResearchDocument34 pagesINFORMS Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To Operations ResearchPabloPas encore d'évaluation
- s14 CompletareDocument14 pagess14 CompletareLaura NicoletaPas encore d'évaluation
- Difference Equations in Normed Spaces: Stability and OscillationsD'EverandDifference Equations in Normed Spaces: Stability and OscillationsPas encore d'évaluation
- Shahzeb Hassan: Career ObjectiveDocument2 pagesShahzeb Hassan: Career ObjectiveomairPas encore d'évaluation
- Squid InvaderDocument14 pagesSquid InvaderMikhail Roy Dela CruzPas encore d'évaluation
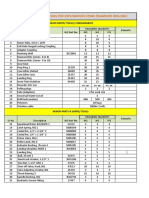
- Minimum drilling supplies stockDocument3 pagesMinimum drilling supplies stockAsif KhanzadaPas encore d'évaluation
- Electric Double Layer Capacitors GuideDocument20 pagesElectric Double Layer Capacitors GuideMusa Abdul AzizPas encore d'évaluation
- Aggregate Turf PavementDocument6 pagesAggregate Turf PavementDevrim GürselPas encore d'évaluation
- 8Document69 pages8Yussuf HusseinPas encore d'évaluation
- CIS ch.5 NotesDocument4 pagesCIS ch.5 NotesClarize R. MabiogPas encore d'évaluation
- Data Visualization Nanodegree Program Syllabus PDFDocument4 pagesData Visualization Nanodegree Program Syllabus PDFsergio paredesPas encore d'évaluation
- Cross Country Sheets1Document2 pagesCross Country Sheets1Anonymous 10cG5eRp8Pas encore d'évaluation
- Po Ex en 170413 WebDocument1 pagePo Ex en 170413 Webswordleee swordPas encore d'évaluation
- Ubd WonderDocument13 pagesUbd Wonderapi-422461005100% (1)
- BassoonBocals PDFDocument3 pagesBassoonBocals PDFnheyminkPas encore d'évaluation
- Sunstack Tech SpecDocument2 pagesSunstack Tech SpecAdriel MirtoPas encore d'évaluation
- O & M Manual For JHVR 6000X PDFDocument234 pagesO & M Manual For JHVR 6000X PDFvenkatesh100% (2)
- BDS Maschinen MABasicDocument4 pagesBDS Maschinen MABasicJOAQUINPas encore d'évaluation
- Fireplaces, Mantels, Hearths & InteriorsDocument12 pagesFireplaces, Mantels, Hearths & InteriorsFare NientePas encore d'évaluation
- Caustic Soda Plant 27 000 Tpy 186Document1 pageCaustic Soda Plant 27 000 Tpy 186Riddhi SavaliyaPas encore d'évaluation
- My Life - An Illustrated Biograp - A.P.J. Abdul KalamDocument76 pagesMy Life - An Illustrated Biograp - A.P.J. Abdul KalamAnonymous OJsGrxlx6100% (1)
- Special cables for hybrid vehiclesDocument1 pageSpecial cables for hybrid vehiclesVlado PetkovskiPas encore d'évaluation
- Staring Index PagesDocument7 pagesStaring Index PagesKolte RushikeshPas encore d'évaluation
- Portfolio Ross ReevesDocument17 pagesPortfolio Ross ReevesRoss ReevesPas encore d'évaluation
- IalDocument24 pagesIalWMONTOYA4897Pas encore d'évaluation
- Developments in The Singapore Electricity Transmission Network - 5 Apr 2011Document8 pagesDevelopments in The Singapore Electricity Transmission Network - 5 Apr 2011Megha SharmaPas encore d'évaluation
- Ekspanzioni VentilDocument6 pagesEkspanzioni VentilNevena AksićPas encore d'évaluation