Vous aimerez peut-être aussi
- Analysis of Cascaded H-Bridge Multilevel Inverter With Phase Shifted PWM On Induction MotorDocument12 pagesAnalysis of Cascaded H-Bridge Multilevel Inverter With Phase Shifted PWM On Induction MotoremyimranPas encore d'évaluation
- Comparative Analysis of Voltage Control Signal Techniques For Single Phase InverterDocument9 pagesComparative Analysis of Voltage Control Signal Techniques For Single Phase InverteremyimranPas encore d'évaluation
- Ace Engineering Academy: Gate - 2011 Key Sheet Ec: Electronics & Communication EngineeringDocument1 pageAce Engineering Academy: Gate - 2011 Key Sheet Ec: Electronics & Communication EngineeringemyimranPas encore d'évaluation
- Introduction To Neural Networks: Exercise Sheet 1: Question 1 (Based On Question 1 in Jan 1999 Exam)Document2 pagesIntroduction To Neural Networks: Exercise Sheet 1: Question 1 (Based On Question 1 in Jan 1999 Exam)Mohamed NabeelPas encore d'évaluation
- Distributed GenerationDocument414 pagesDistributed GenerationemyimranPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Continue: Rudolf Bultmann Theology of The New Testament PDFDocument3 pagesContinue: Rudolf Bultmann Theology of The New Testament PDFpishoi gerges0% (1)
- Photon Trading - Market Structure BasicsDocument11 pagesPhoton Trading - Market Structure Basicstula amar100% (2)
- Shahroz Khan CVDocument5 pagesShahroz Khan CVsid202pkPas encore d'évaluation
- BASUG School Fees For Indigene1Document3 pagesBASUG School Fees For Indigene1Ibrahim Aliyu GumelPas encore d'évaluation
- Social Media Marketing Advice To Get You StartedmhogmDocument2 pagesSocial Media Marketing Advice To Get You StartedmhogmSanchezCowan8Pas encore d'évaluation
- EnerconDocument7 pagesEnerconAlex MarquezPas encore d'évaluation
- Aluminum 3003-H112: Metal Nonferrous Metal Aluminum Alloy 3000 Series Aluminum AlloyDocument2 pagesAluminum 3003-H112: Metal Nonferrous Metal Aluminum Alloy 3000 Series Aluminum AlloyJoachim MausolfPas encore d'évaluation
- Ikea AnalysisDocument33 pagesIkea AnalysisVinod BridglalsinghPas encore d'évaluation
- Lending OperationsDocument54 pagesLending OperationsFaraz Ahmed FarooqiPas encore d'évaluation
- Micron Interview Questions Summary # Question 1 Parsing The HTML WebpagesDocument2 pagesMicron Interview Questions Summary # Question 1 Parsing The HTML WebpagesKartik SharmaPas encore d'évaluation
- Government of West Bengal Finance (Audit) Department: NABANNA', HOWRAH-711102 No. Dated, The 13 May, 2020Document2 pagesGovernment of West Bengal Finance (Audit) Department: NABANNA', HOWRAH-711102 No. Dated, The 13 May, 2020Satyaki Prasad MaitiPas encore d'évaluation
- LMU-2100™ Gprs/Cdmahspa Series: Insurance Tracking Unit With Leading TechnologiesDocument2 pagesLMU-2100™ Gprs/Cdmahspa Series: Insurance Tracking Unit With Leading TechnologiesRobert MateoPas encore d'évaluation
- Environmental Auditing For Building Construction: Energy and Air Pollution Indices For Building MaterialsDocument8 pagesEnvironmental Auditing For Building Construction: Energy and Air Pollution Indices For Building MaterialsAhmad Zubair Hj YahayaPas encore d'évaluation
- Peoria County Jail Booking Sheet For Oct. 7, 2016Document6 pagesPeoria County Jail Booking Sheet For Oct. 7, 2016Journal Star police documents50% (2)
- GL 186400 Case DigestDocument2 pagesGL 186400 Case DigestRuss TuazonPas encore d'évaluation
- CDKR Web v0.2rcDocument3 pagesCDKR Web v0.2rcAGUSTIN SEVERINOPas encore d'évaluation
- Newsletter 289Document10 pagesNewsletter 289Henry CitizenPas encore d'évaluation
- 4 Bar LinkDocument4 pages4 Bar LinkConstance Lynn'da GPas encore d'évaluation
- Methodical Pointing For Work of Students On Practical EmploymentDocument32 pagesMethodical Pointing For Work of Students On Practical EmploymentVidhu YadavPas encore d'évaluation
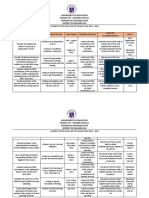
- Action Plan Lis 2021-2022Document3 pagesAction Plan Lis 2021-2022Vervie BingalogPas encore d'évaluation
- Unit 1Document3 pagesUnit 1beharenbPas encore d'évaluation
- JAZEL Resume-2-1-2-1-3-1Document2 pagesJAZEL Resume-2-1-2-1-3-1GirlieJoyGayoPas encore d'évaluation
- CV Ovais MushtaqDocument4 pagesCV Ovais MushtaqiftiniaziPas encore d'évaluation
- CNC USB English ManualDocument31 pagesCNC USB English ManualHarold Hernan MuñozPas encore d'évaluation
- Income Statement, Its Elements, Usefulness and LimitationsDocument5 pagesIncome Statement, Its Elements, Usefulness and LimitationsDipika tasfannum salamPas encore d'évaluation
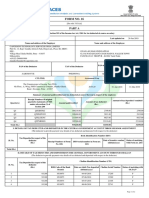
- Form16 2018 2019Document10 pagesForm16 2018 2019LogeshwaranPas encore d'évaluation
- Himachal Pradesh Important NumbersDocument3 pagesHimachal Pradesh Important NumbersRaghav RahinwalPas encore d'évaluation
- Saet Work AnsDocument5 pagesSaet Work AnsSeanLejeeBajan89% (27)
- CANELA Learning Activity - NSPE Code of EthicsDocument4 pagesCANELA Learning Activity - NSPE Code of EthicsChristian CanelaPas encore d'évaluation
- Wendi C. Lassiter, Raleigh NC ResumeDocument2 pagesWendi C. Lassiter, Raleigh NC ResumewendilassiterPas encore d'évaluation