Vous aimerez peut-être aussi
- John Shawe-Taylor - Centre For Computational Statistics and Machine LearningDocument24 pagesJohn Shawe-Taylor - Centre For Computational Statistics and Machine LearningNoScriptPas encore d'évaluation
- Steven Lemm, Christin Schafer and Gabriel Curio - Aggregating Classification Accuracy Across Time: Application To Single Trial EEGDocument8 pagesSteven Lemm, Christin Schafer and Gabriel Curio - Aggregating Classification Accuracy Across Time: Application To Single Trial EEGNoScriptPas encore d'évaluation
- Robert Leeb Et Al - A Tetraplegic Patient Controls A Wheelchair in Virtual RealityDocument4 pagesRobert Leeb Et Al - A Tetraplegic Patient Controls A Wheelchair in Virtual RealityNoScriptPas encore d'évaluation
- Thomas Navin Lal Et Al - A Brain Computer Interface With Online Feedback Based On MagnetoencephalographyDocument8 pagesThomas Navin Lal Et Al - A Brain Computer Interface With Online Feedback Based On MagnetoencephalographyNoScriptPas encore d'évaluation
- Henrik Ohlsson - Regression On Manifolds With Implications For System IdentificationDocument115 pagesHenrik Ohlsson - Regression On Manifolds With Implications For System IdentificationNoScriptPas encore d'évaluation
- Leonard J. Trejo Et Al - Multimodal Neuroelectric Interface DevelopmentDocument6 pagesLeonard J. Trejo Et Al - Multimodal Neuroelectric Interface DevelopmentNoScriptPas encore d'évaluation
- Roman Rosipal - Kernel-Based Regression and Objective Nonlinear Measures To Assess Brain FunctioningDocument106 pagesRoman Rosipal - Kernel-Based Regression and Objective Nonlinear Measures To Assess Brain FunctioningNoScriptPas encore d'évaluation
- Vincent Guigue Et Al - Translation Invariant Classification of Non-Stationary SignalsDocument6 pagesVincent Guigue Et Al - Translation Invariant Classification of Non-Stationary SignalsNoScriptPas encore d'évaluation
- Cédric Arrouët Et Al - Open-ViBE: A 3D Platform For Real-Time NeuroscienceDocument22 pagesCédric Arrouët Et Al - Open-ViBE: A 3D Platform For Real-Time NeuroscienceNoScriptPas encore d'évaluation
- Katarzyna Blinowska Et Al - Multimodal Imaging of Human Brain Activity: Rational, Biophysical Aspects and Modes of IntegrationDocument10 pagesKatarzyna Blinowska Et Al - Multimodal Imaging of Human Brain Activity: Rational, Biophysical Aspects and Modes of IntegrationNoScriptPas encore d'évaluation
- Ye Yang - Pattern Analysis of Functional MRI DataDocument41 pagesYe Yang - Pattern Analysis of Functional MRI DataNoScriptPas encore d'évaluation
- Jean-Marc Vesin and Touradj Ebrahimi - Trends in Brain Computer InterfacesDocument94 pagesJean-Marc Vesin and Touradj Ebrahimi - Trends in Brain Computer InterfacesNoScriptPas encore d'évaluation
- James Ford Et Al - Patient Classi Cation of fMRI Activation MapsDocument8 pagesJames Ford Et Al - Patient Classi Cation of fMRI Activation MapsNoScriptPas encore d'évaluation
- Kay H. Brodersen - Decoding Mental Activity From Neuroimaging Data - The Science Behind Mind-ReadingDocument7 pagesKay H. Brodersen - Decoding Mental Activity From Neuroimaging Data - The Science Behind Mind-ReadingNoScriptPas encore d'évaluation
- Henrik Ohlsson Et Al - Enabling Bio-Feedback Using Real-Time fMRIDocument6 pagesHenrik Ohlsson Et Al - Enabling Bio-Feedback Using Real-Time fMRINoScriptPas encore d'évaluation
- Yukiyasu Kamitani and Frank Tong - Decoding The Visual and Subjective Contents of The Human BrainDocument18 pagesYukiyasu Kamitani and Frank Tong - Decoding The Visual and Subjective Contents of The Human BrainNoScriptPas encore d'évaluation
- Rianne Hupse - Localisation Techniques To Improve BCIDocument56 pagesRianne Hupse - Localisation Techniques To Improve BCINoScriptPas encore d'évaluation
- Barry Chai Et Al - Exploring Functional Connectivity of The Human Brain Using Multivariate Information AnalysisDocument9 pagesBarry Chai Et Al - Exploring Functional Connectivity of The Human Brain Using Multivariate Information AnalysisNoScriptPas encore d'évaluation
- Theoretical, Statistical, and Practical Perspectives On Pattern-Based Classification Approaches To The Analysis of Functional Neuroimaging DataDocument19 pagesTheoretical, Statistical, and Practical Perspectives On Pattern-Based Classification Approaches To The Analysis of Functional Neuroimaging DataNoScriptPas encore d'évaluation
- Nikolaus Weiskopf Et Al - Principles of A Brain-Computer Interface (BCI) Based On Real-Time Functional Magnetic Resonance Imaging (fMRI)Document5 pagesNikolaus Weiskopf Et Al - Principles of A Brain-Computer Interface (BCI) Based On Real-Time Functional Magnetic Resonance Imaging (fMRI)NoScriptPas encore d'évaluation
- Tom M. Mitchell Et Al - Classifying Instantaneous Cognitive States From fMRI DataDocument5 pagesTom M. Mitchell Et Al - Classifying Instantaneous Cognitive States From fMRI DataNoScriptPas encore d'évaluation
- Anders Eklund Et Al - Using Real-Time fMRI To Control A Dynamical System by Brain Activity ClassificationDocument8 pagesAnders Eklund Et Al - Using Real-Time fMRI To Control A Dynamical System by Brain Activity ClassificationNoScriptPas encore d'évaluation
- Xuerui Wang, Rebecca Hutchinson and Tom M. Mitchell - Training fMRI Classifiers To Detect Cognitive States Across Multiple Human SubjectsDocument8 pagesXuerui Wang, Rebecca Hutchinson and Tom M. Mitchell - Training fMRI Classifiers To Detect Cognitive States Across Multiple Human SubjectsNoScriptPas encore d'évaluation
- John-Dylan Haynes and Geraint Rees - Decoding Mental States From Brain Activity in HumansDocument12 pagesJohn-Dylan Haynes and Geraint Rees - Decoding Mental States From Brain Activity in HumansNoScriptPas encore d'évaluation
- Hasan Ayaz Et Al - Detecting Cognitive Activity Related Hemodynamic Signal For Brain Computer Interface Using Functional Near Infrared SpectrosDocument5 pagesHasan Ayaz Et Al - Detecting Cognitive Activity Related Hemodynamic Signal For Brain Computer Interface Using Functional Near Infrared SpectrosNoScriptPas encore d'évaluation
- Kendrick N. Kay Et Al - Identifying Natural Images From Human Brain ActivityDocument5 pagesKendrick N. Kay Et Al - Identifying Natural Images From Human Brain ActivityNoScriptPas encore d'évaluation
- Decoding Cognitive States From fMRI Data Using Support Vector RegressionDocument14 pagesDecoding Cognitive States From fMRI Data Using Support Vector RegressionNoScriptPas encore d'évaluation
- Sean M. Polyn Et Al - Category-Specific Cortical Activity Precedes Retrieval During Memory SearchDocument5 pagesSean M. Polyn Et Al - Category-Specific Cortical Activity Precedes Retrieval During Memory SearchNoScriptPas encore d'évaluation
- John-Dylan Haynes and Geraint Rees - Predicting The Orientation of Invisible Stimuli From Activity in Human Primary Visual CortexDocument15 pagesJohn-Dylan Haynes and Geraint Rees - Predicting The Orientation of Invisible Stimuli From Activity in Human Primary Visual CortexNoScriptPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- CMAT Sample Paper 2Document3 pagesCMAT Sample Paper 2Aaditya Baid100% (1)
- Grade 7 Pre-Algebra SyllabusDocument2 pagesGrade 7 Pre-Algebra Syllabuspatricia.maia8301Pas encore d'évaluation
- CAL Index ThesesDocument29 pagesCAL Index ThesesBrandon Lim100% (1)
- Masculinitate Vs FeminitateDocument3 pagesMasculinitate Vs FeminitateCOSMINPas encore d'évaluation
- Down Syndrome PresentationDocument24 pagesDown Syndrome PresentationvivienPas encore d'évaluation
- Project Management BibliographyDocument48 pagesProject Management BibliographyPuneet AroraPas encore d'évaluation
- Photo Story RubricDocument2 pagesPhoto Story RubricAnnette Puglia HerskowitzPas encore d'évaluation
- I'm Jimmy Sanchez: HelloDocument2 pagesI'm Jimmy Sanchez: Helloapi-391216082Pas encore d'évaluation
- SRA Reading Laboratory Levels Chart UpatedDocument1 pageSRA Reading Laboratory Levels Chart UpatedSan Htiet Oo0% (1)
- Pharmacy Law Syllabus Fall 2017 FinalDocument7 pagesPharmacy Law Syllabus Fall 2017 FinalTiff VoPas encore d'évaluation
- Hey Learned How To Respect Each Other by Calling Each Other Sir and Calling The Coach Sir As Well. and If They Didn't Do That They Got PunishedDocument2 pagesHey Learned How To Respect Each Other by Calling Each Other Sir and Calling The Coach Sir As Well. and If They Didn't Do That They Got PunishedKiller KnightPas encore d'évaluation
- CV Summary for Rohit BhasinDocument3 pagesCV Summary for Rohit BhasinRohit BhasinPas encore d'évaluation
- Hasil Rekapan Soal UP PPGDocument10 pagesHasil Rekapan Soal UP PPGMasri Manas75% (4)
- 2020 - Bagaimana Mengembangkan Kemampuan Spasial Dalam Pembelajaran Matematika Di SekolahDocument13 pages2020 - Bagaimana Mengembangkan Kemampuan Spasial Dalam Pembelajaran Matematika Di SekolahAlgha RadiPas encore d'évaluation
- The Head Teacher and TeachersDocument2 pagesThe Head Teacher and TeachersXoha AdreesPas encore d'évaluation
- LET0317ra ELEMENTARY Catarman PDFDocument26 pagesLET0317ra ELEMENTARY Catarman PDFPhilBoardResultsPas encore d'évaluation
- Mining Engineer Job Ad for Coal CompanyDocument1 pageMining Engineer Job Ad for Coal CompanySaktri OktarezaPas encore d'évaluation
- Grade Level: RO7-EGMAT FORM 1A (To Be Accomplished by The School MKP)Document5 pagesGrade Level: RO7-EGMAT FORM 1A (To Be Accomplished by The School MKP)Angel ScarletPas encore d'évaluation
- Homework Unit 12Document7 pagesHomework Unit 12marjorie mejia marinPas encore d'évaluation
- Relationship Between Demographics and Housing AffordabilityDocument10 pagesRelationship Between Demographics and Housing AffordabilityQian WangPas encore d'évaluation
- Lesson Plan SONGDocument6 pagesLesson Plan SONGDadymus UpinPas encore d'évaluation
- Educ Answer.Document2 pagesEduc Answer.Rosaly Bontia100% (2)
- EDA201WDocument82 pagesEDA201Wcerista anthonyPas encore d'évaluation
- Gujarat Technological University: 1. Learning Outcome Component Learning Outcome (Learner Will Be Able To)Document5 pagesGujarat Technological University: 1. Learning Outcome Component Learning Outcome (Learner Will Be Able To)PRINCE PATELPas encore d'évaluation
- Transmutation TableDocument8 pagesTransmutation TableRegienald CuevasPas encore d'évaluation
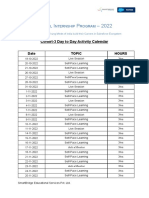
- Virtual Internship Program Activity CalendarDocument2 pagesVirtual Internship Program Activity Calendaranagha joshiPas encore d'évaluation
- Resource Unit EconomicsDocument8 pagesResource Unit EconomicsMelchor Felipe SalvosaPas encore d'évaluation
- 1Q BM 1st Module A.Y. 2021 - 2022Document10 pages1Q BM 1st Module A.Y. 2021 - 2022Jewel RamosPas encore d'évaluation
- Grade 9 Stress SyllableDocument6 pagesGrade 9 Stress SyllableHồ Viết TiênPas encore d'évaluation
- Edexcel GCSE Mathematics (Linear) – 1MA0 ALGEBRA: EXPAND & FACTORISEDocument8 pagesEdexcel GCSE Mathematics (Linear) – 1MA0 ALGEBRA: EXPAND & FACTORISETakayuki MimaPas encore d'évaluation