Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Comparative Study of English and ArabicDocument16 pagesComparative Study of English and ArabicHamid AlhajjajPas encore d'évaluation
- DLL English q1 Week 7docxDocument5 pagesDLL English q1 Week 7docxVince Rayos CailingPas encore d'évaluation
- Reflection On TRC Calls To Action - AssignmentDocument4 pagesReflection On TRC Calls To Action - Assignmentapi-547138479Pas encore d'évaluation
- Action Plan in MathDocument4 pagesAction Plan in MathRoselyn Catubig Vidad Jumadla100% (4)
- Leadership and Followership Ebook PrintableDocument173 pagesLeadership and Followership Ebook PrintableEslam NourPas encore d'évaluation
- Kai Labusch, Erhardt Barth and Thomas Martinetz - Sparse Coding Neural Gas: Learning of Overcomplete Data RepresentationsDocument21 pagesKai Labusch, Erhardt Barth and Thomas Martinetz - Sparse Coding Neural Gas: Learning of Overcomplete Data RepresentationsTuhmaPas encore d'évaluation
- Frank-Michael Schleif, Matthias Ongyerth and Thomas Villmann - Sparse Coding Neural Gas For Analysis of Nuclear Magnetic Resonance SpectrosDocument6 pagesFrank-Michael Schleif, Matthias Ongyerth and Thomas Villmann - Sparse Coding Neural Gas For Analysis of Nuclear Magnetic Resonance SpectrosTuhmaPas encore d'évaluation
- Anthony Kuh - Neural Networks and Learning TheoryDocument72 pagesAnthony Kuh - Neural Networks and Learning TheoryTuhmaPas encore d'évaluation
- T. Villmann Et Al - Fuzzy Labeled Neural Gas For Fuzzy ClassificationDocument8 pagesT. Villmann Et Al - Fuzzy Labeled Neural Gas For Fuzzy ClassificationTuhmaPas encore d'évaluation
- Kai Labusch, Erhardt Barth and Thomas Martinetz - Approaching The Time Dependent Cocktail Party Problem With Online Sparse Coding Neural GasDocument9 pagesKai Labusch, Erhardt Barth and Thomas Martinetz - Approaching The Time Dependent Cocktail Party Problem With Online Sparse Coding Neural GasTuhmaPas encore d'évaluation
- Barbara Hammer and Alexander Hasenfuss - Topographic Mapping of Large Dissimilarity Data SetsDocument58 pagesBarbara Hammer and Alexander Hasenfuss - Topographic Mapping of Large Dissimilarity Data SetsTuhmaPas encore d'évaluation
- Frank-Michael Schleif - Sparse Kernelized Vector Quantization With Local DependenciesDocument8 pagesFrank-Michael Schleif - Sparse Kernelized Vector Quantization With Local DependenciesTuhmaPas encore d'évaluation
- Clifford Sze-Tsan Choy and Wan-Chi Siu - Fast Sequential Implementation of "Neural-Gas" Network For Vector QuantizationDocument4 pagesClifford Sze-Tsan Choy and Wan-Chi Siu - Fast Sequential Implementation of "Neural-Gas" Network For Vector QuantizationTuhmaPas encore d'évaluation
- Frank-Michael Schleif Et Al - Generalized Derivative Based Kernelized Learning Vector QuantizationDocument8 pagesFrank-Michael Schleif Et Al - Generalized Derivative Based Kernelized Learning Vector QuantizationTuhmaPas encore d'évaluation
- Chang Liang Et Al - Scaling Up Kernel Grower Clustering Method For Large Data Sets Via Core-SetsDocument7 pagesChang Liang Et Al - Scaling Up Kernel Grower Clustering Method For Large Data Sets Via Core-SetsTuhmaPas encore d'évaluation
- Kai Labusch, Erhardt Barth and Thomas Martinetz - Learning Data Representations With Sparse Coding Neural GasDocument6 pagesKai Labusch, Erhardt Barth and Thomas Martinetz - Learning Data Representations With Sparse Coding Neural GasTuhmaPas encore d'évaluation
- Banchar Arnonkijpanich, Barbara Hammer and Alexander Hasenfuss - Local Matrix Adaptation in Topographic Neural MapsDocument34 pagesBanchar Arnonkijpanich, Barbara Hammer and Alexander Hasenfuss - Local Matrix Adaptation in Topographic Neural MapsTuhmaPas encore d'évaluation
- J.-H.Wang and J.-D.Rau - VQ-agglomeration: A Novel Approach To ClusteringDocument9 pagesJ.-H.Wang and J.-D.Rau - VQ-agglomeration: A Novel Approach To ClusteringTuhmaPas encore d'évaluation
- Stephen J. Verzi Et Al - Universal Approximation, With Fuzzy ART And. Fuzzy ARTMAPDocument6 pagesStephen J. Verzi Et Al - Universal Approximation, With Fuzzy ART And. Fuzzy ARTMAPTuhmaPas encore d'évaluation
- Shao-Han Liu and Jzau-Sheng Lin - A Compensated Fuzzy Hopfield Neural Network For Codebook Design in Vector QuantizationDocument13 pagesShao-Han Liu and Jzau-Sheng Lin - A Compensated Fuzzy Hopfield Neural Network For Codebook Design in Vector QuantizationTuhmaPas encore d'évaluation
- Dietmar Heinke and Fred H. Hamker - Comparing Neural Networks: A Benchmark On Growing Neural Gas, Growing Cell Structures, and Fuzzy ARTMAPDocument13 pagesDietmar Heinke and Fred H. Hamker - Comparing Neural Networks: A Benchmark On Growing Neural Gas, Growing Cell Structures, and Fuzzy ARTMAPTuhmaPas encore d'évaluation
- Jim Holmström - Growing Neural Gas: Experiments With GNG, GNG With Utility and Supervised GNGDocument42 pagesJim Holmström - Growing Neural Gas: Experiments With GNG, GNG With Utility and Supervised GNGTuhmaPas encore d'évaluation
- Evren Ozarslan Et Al - Resolution of Complex Tissue Microarchitecture Using The Diffusion Orientation Transform (DOT)Document18 pagesEvren Ozarslan Et Al - Resolution of Complex Tissue Microarchitecture Using The Diffusion Orientation Transform (DOT)TuhmaPas encore d'évaluation
- David S. Tuch Et Al - High Angular Resolution Diffusion Imaging Reveals Intravoxel White Matter Fiber HeterogeneityDocument6 pagesDavid S. Tuch Et Al - High Angular Resolution Diffusion Imaging Reveals Intravoxel White Matter Fiber HeterogeneityTuhmaPas encore d'évaluation
- Deterministic and Probabilistic Q-Ball Tractography: From Diffusion To Sharp Fiber DistributionsDocument39 pagesDeterministic and Probabilistic Q-Ball Tractography: From Diffusion To Sharp Fiber DistributionsTuhmaPas encore d'évaluation
- M. Perrin Et Al - Fiber Tracking in Q-Ball Fields Using Regularized Particle TrajectoriesDocument12 pagesM. Perrin Et Al - Fiber Tracking in Q-Ball Fields Using Regularized Particle TrajectoriesTuhmaPas encore d'évaluation
- Fabrice Rossi, Brieuc Conan-Guez and Francois Fleuret - Theoretical Properties of Functional Multi Layer PerceptronsDocument6 pagesFabrice Rossi, Brieuc Conan-Guez and Francois Fleuret - Theoretical Properties of Functional Multi Layer PerceptronsTuhmaPas encore d'évaluation
- Kalvis M Jansons and Daniel C Alexander - Persistent Angular Structure: New Insights From Diffusion Magnetic Resonance Imaging DataDocument16 pagesKalvis M Jansons and Daniel C Alexander - Persistent Angular Structure: New Insights From Diffusion Magnetic Resonance Imaging DataTuhmaPas encore d'évaluation
- Christopher P. Hess Et Al - Q-Ball Reconstruction of Multimodal Fiber Orientations Using The Spherical Harmonic BasisDocument14 pagesChristopher P. Hess Et Al - Q-Ball Reconstruction of Multimodal Fiber Orientations Using The Spherical Harmonic BasisTuhmaPas encore d'évaluation
- Maxime Descoteaux Et Al - Regularized, Fast, and Robust Analytical Q-Ball ImagingDocument14 pagesMaxime Descoteaux Et Al - Regularized, Fast, and Robust Analytical Q-Ball ImagingTuhmaPas encore d'évaluation
- P.A. Castillo Et Al - Optimisation of Multilayer Perceptrons Using A Distributed Evolutionary Algorithm With SOAPDocument10 pagesP.A. Castillo Et Al - Optimisation of Multilayer Perceptrons Using A Distributed Evolutionary Algorithm With SOAPTuhmaPas encore d'évaluation
- TheoriesDocument14 pagesTheoriesChristine Joy DelaCruz CorpuzPas encore d'évaluation
- STLABDocument5 pagesSTLABKrishna RajbharPas encore d'évaluation
- Virtual Private ServerDocument3 pagesVirtual Private Serverapi-284444897Pas encore d'évaluation
- On Your Date of Joining, You Are Compulsorily Required ToDocument3 pagesOn Your Date of Joining, You Are Compulsorily Required Tokanna1808Pas encore d'évaluation
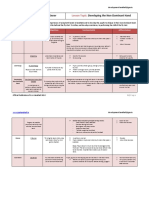
- Lesson 4 - Developing The Non-Dominant HandDocument6 pagesLesson 4 - Developing The Non-Dominant HandBlaja AroraArwen AlexisPas encore d'évaluation
- Lesson Plan Songs and PoetryDocument13 pagesLesson Plan Songs and PoetryDeena ChandramohanPas encore d'évaluation
- Health EducationDocument2 pagesHealth EducationRhea Cherl Ragsag IIPas encore d'évaluation
- Peg Leg The Pirate DesignDocument4 pagesPeg Leg The Pirate Designapi-371644744Pas encore d'évaluation
- Impact of Online LearningDocument16 pagesImpact of Online LearningJessabel RafalloPas encore d'évaluation
- Graduate Nurse Resume ExamplesDocument9 pagesGraduate Nurse Resume Examplesoyutlormd100% (1)
- Alumni Id Lastname First Name Stream City2 Residential Address Year of Passing Departmen TDocument145 pagesAlumni Id Lastname First Name Stream City2 Residential Address Year of Passing Departmen Tshimoo_whoPas encore d'évaluation
- Back Propagation Neural Network 1: Lili Ayu Wulandhari PH.DDocument8 pagesBack Propagation Neural Network 1: Lili Ayu Wulandhari PH.DDewa Bagus KrisnaPas encore d'évaluation
- You Will Learn How To: Introduce Yourself. Ask People About Some Specific InformationDocument4 pagesYou Will Learn How To: Introduce Yourself. Ask People About Some Specific InformationPaula Valentina Hernandez RojasPas encore d'évaluation
- 00 공학을위한컴퓨터과학적사고 WelcomeDocument10 pages00 공학을위한컴퓨터과학적사고 Welcomebagminju46Pas encore d'évaluation
- Gilbert CH 6 TXTBK NotesDocument3 pagesGilbert CH 6 TXTBK NotesBillie WrobleskiPas encore d'évaluation
- John TrussDocument7 pagesJohn Trussrobinson robertsPas encore d'évaluation
- CircularVaccnies 01032024Document3 pagesCircularVaccnies 01032024bidafo2019Pas encore d'évaluation
- Chapter 1 Research PaperDocument5 pagesChapter 1 Research PaperMae DeloriaPas encore d'évaluation
- Yield Stress Sa 240 304Document1 pageYield Stress Sa 240 304faizalPas encore d'évaluation
- 20 Points RubricsDocument1 page20 Points RubricsJerome Formalejo,Pas encore d'évaluation
- Volume of Cylinders Lesson PlanDocument5 pagesVolume of Cylinders Lesson Planapi-310264286Pas encore d'évaluation
- TG Read Up 3Document98 pagesTG Read Up 3DinPas encore d'évaluation
- Senior Scientist Microbiologist in Boston MA Resume Adhar MannaDocument2 pagesSenior Scientist Microbiologist in Boston MA Resume Adhar MannaAdharMannaPas encore d'évaluation
- Translating A Competency Standard Into A Competency-Based CurriculumDocument11 pagesTranslating A Competency Standard Into A Competency-Based Curriculumxycor madlaPas encore d'évaluation
- The Abington Journal 02-01-2012Document20 pagesThe Abington Journal 02-01-2012The Times LeaderPas encore d'évaluation