Vous aimerez peut-être aussi
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachD'EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachPas encore d'évaluation
- Hybrid Dynamical Systems: Modeling, Stability, and RobustnessD'EverandHybrid Dynamical Systems: Modeling, Stability, and RobustnessPas encore d'évaluation
- Ball and Beam AssignmentDocument4 pagesBall and Beam AssignmentBalayogi GPas encore d'évaluation
- Ball and Beam1Document6 pagesBall and Beam1Saeed AsiriPas encore d'évaluation
- Full Order Observer Controller Design For DC Motor Based On State Space ApproachDocument5 pagesFull Order Observer Controller Design For DC Motor Based On State Space ApproachSelaRajPas encore d'évaluation
- University of Twente: System Identification & Parameter Estimation Re-Assignment Navaneeth Balamuralidhar S2070707Document12 pagesUniversity of Twente: System Identification & Parameter Estimation Re-Assignment Navaneeth Balamuralidhar S2070707Navaneeth Krishnan BPas encore d'évaluation
- Switched Systems, Stability of Switched Systems in Sense of LyapunovDocument200 pagesSwitched Systems, Stability of Switched Systems in Sense of LyapunovMamdouh KhudaydusPas encore d'évaluation
- Mo Phong Matlab Ball and BeamDocument52 pagesMo Phong Matlab Ball and BeamHuong NguyenPas encore d'évaluation
- Matlab Robust Control ToolboxDocument168 pagesMatlab Robust Control ToolboxRishi Kant SharmaPas encore d'évaluation
- Modeling An Inverted PendulumDocument45 pagesModeling An Inverted Pendulumjunaid_honey83896770% (1)
- Dan Saks C++ in Embedded SystemsDocument24 pagesDan Saks C++ in Embedded SystemsarunksahaPas encore d'évaluation
- Inverted Pendulum On Cart SolutionDocument8 pagesInverted Pendulum On Cart SolutionMario R. KallabPas encore d'évaluation
- State Space DesignDocument47 pagesState Space DesigneuticusPas encore d'évaluation
- Designing A Neuro PD With Gravity Compensation For Six Legged RobotDocument8 pagesDesigning A Neuro PD With Gravity Compensation For Six Legged RobotVishwanath KetkarPas encore d'évaluation
- Two Degrees of Freedom PID Control For Active Vibration Control of StructuresDocument9 pagesTwo Degrees of Freedom PID Control For Active Vibration Control of StructuresndjedouiPas encore d'évaluation
- Modelado Rotary Pendulum Workbook InstructorDocument60 pagesModelado Rotary Pendulum Workbook Instructorsolid34Pas encore d'évaluation
- Copy Ball and Beam Report XDXDDocument5 pagesCopy Ball and Beam Report XDXDEdu AguirrePas encore d'évaluation
- Spatial Mechanisms Lecture NotesDocument77 pagesSpatial Mechanisms Lecture NotesErico Eric100% (1)
- Closed Loop Speed and Position Control of DC MotorsDocument7 pagesClosed Loop Speed and Position Control of DC Motorslizhi0007Pas encore d'évaluation
- Modeling and Simulation of Sensorless Control of PMSM With Luenberger Rotor Position Observer and Sui Pid ControllerDocument8 pagesModeling and Simulation of Sensorless Control of PMSM With Luenberger Rotor Position Observer and Sui Pid ControllerYassine MbzPas encore d'évaluation
- 9 Ball and BeamDocument15 pages9 Ball and BeamshaheerdurraniPas encore d'évaluation
- DynamicsDocument31 pagesDynamicsNagamani RajeshPas encore d'évaluation
- System Simulation Using Matlab, State Plane PlotsDocument7 pagesSystem Simulation Using Matlab, State Plane PlotsmosictrlPas encore d'évaluation
- Inverted PendulumDocument4 pagesInverted PendulumFerbPas encore d'évaluation
- Advance Control SystemDocument3 pagesAdvance Control Systemcoep05100% (1)
- Control System Notes by HPK KumarDocument56 pagesControl System Notes by HPK KumarNathan SwansonPas encore d'évaluation
- Rotary Inverted Pendulum: ME 452 Course Project IIDocument25 pagesRotary Inverted Pendulum: ME 452 Course Project IIMohammed BenbrahimPas encore d'évaluation
- 1 Flexible Link ProjectDocument15 pages1 Flexible Link Projectprasaad08Pas encore d'évaluation
- Model Predictive Control For UAVsDocument24 pagesModel Predictive Control For UAVsJulio BVPas encore d'évaluation
- Ball and Beam DynamicsDocument9 pagesBall and Beam Dynamicssaw2010Pas encore d'évaluation
- Lec12 ControlDocument19 pagesLec12 ControlbalkyderPas encore d'évaluation
- Real-Time Fuzzy Microcontroller PDFDocument6 pagesReal-Time Fuzzy Microcontroller PDFsamyPas encore d'évaluation
- Nonlinear Zero Dynamics in Control SystemsDocument12 pagesNonlinear Zero Dynamics in Control SystemsAshik AhmedPas encore d'évaluation
- Inverted PendulumDocument10 pagesInverted PendulumLubeck Abraham Huaman PoncePas encore d'évaluation
- Inverted Pendulum State-Space Methods For Controller DesignDocument16 pagesInverted Pendulum State-Space Methods For Controller DesignReyes_nPas encore d'évaluation
- SS Lab ManualDocument48 pagesSS Lab ManualKannan RPas encore d'évaluation
- Design ControllerDocument34 pagesDesign ControllerMaezinha_MarinelaPas encore d'évaluation
- 03 LagrangianDynamics 1Document28 pages03 LagrangianDynamics 1Terence DengPas encore d'évaluation
- Sample Solutions For System DynamicsDocument7 pagesSample Solutions For System DynamicsameershamiehPas encore d'évaluation
- Quarter Car Model Paper - AU-009 PDFDocument7 pagesQuarter Car Model Paper - AU-009 PDFVictoria HicksPas encore d'évaluation
- Smith Predictor Control and Internal ModelDocument5 pagesSmith Predictor Control and Internal Modeldsshin_psPas encore d'évaluation
- System Identification Using MATLABDocument37 pagesSystem Identification Using MATLABMarwan Elmahdi89% (9)
- Blanche-An Experimental in Guidance and Navigation of An Autonomous Robot VehicleDocument12 pagesBlanche-An Experimental in Guidance and Navigation of An Autonomous Robot VehiclemaysamshPas encore d'évaluation
- SVPWM PDFDocument5 pagesSVPWM PDFmauricetappaPas encore d'évaluation
- A Generic RTOS Model For Real-Time Systems Simulation With SystemCDocument6 pagesA Generic RTOS Model For Real-Time Systems Simulation With SystemCnithin s gowdaPas encore d'évaluation
- System Dynamics A Unified ApproachDocument2 pagesSystem Dynamics A Unified ApproachliqsquidPas encore d'évaluation
- Abstract. The Balancing of An Inverted Pendulum byDocument5 pagesAbstract. The Balancing of An Inverted Pendulum byFariz AhdiatamaPas encore d'évaluation
- Dynamic Mobile Robot Paper 1Document6 pagesDynamic Mobile Robot Paper 1pgamasterPas encore d'évaluation
- Modeling and Simulation of Reluctance Motor Using Digital ComputerDocument5 pagesModeling and Simulation of Reluctance Motor Using Digital ComputerroyourboatPas encore d'évaluation
- LQG-LQR Controller DesignDocument37 pagesLQG-LQR Controller Designapi-3698538100% (2)
- Mathematical Modeling of Control SystemDocument31 pagesMathematical Modeling of Control SystemMegiPas encore d'évaluation
- Multibody System Simulation With SimmechanicsDocument24 pagesMultibody System Simulation With SimmechanicsSonny Jason APas encore d'évaluation
- Files 2-Chapters 10 5 Transient Response SpecificationsDocument9 pagesFiles 2-Chapters 10 5 Transient Response SpecificationsYalemwork YargalPas encore d'évaluation
- Cs Pole Placement DesignDocument15 pagesCs Pole Placement Design18U208 - ARJUN A100% (1)
- Boram: Balancing Robot Using Arduino and Lego: Kyungjae Baik (9193618) September 10, 2008Document26 pagesBoram: Balancing Robot Using Arduino and Lego: Kyungjae Baik (9193618) September 10, 2008Carlos Solon Soares Guimarães Jr.Pas encore d'évaluation
- Thesis Modeling of Two Rotor MIMO SystemDocument68 pagesThesis Modeling of Two Rotor MIMO SystemEyad Al-MohatwaryPas encore d'évaluation
- Modeling 101Document15 pagesModeling 101สหายดิว ลูกพระอาทิตย์Pas encore d'évaluation
- Power System Case StudyDocument18 pagesPower System Case Studysmurf aldous100% (1)
- Introduction To Control Engineering: Andy Pomfret and Tim ClarkeDocument54 pagesIntroduction To Control Engineering: Andy Pomfret and Tim ClarkemmmPas encore d'évaluation
- Eccentric Mass Dynamic Vibration Absorber - Vibrations - 2131Document4 pagesEccentric Mass Dynamic Vibration Absorber - Vibrations - 2131southertontimothy100% (4)
- Measuring The Performance Characteristics of A MotDocument6 pagesMeasuring The Performance Characteristics of A Motdani chPas encore d'évaluation
- Go Kart ReviewDocument19 pagesGo Kart Reviewm u rao0% (1)
- Astm F 1157 - 90 R01Document6 pagesAstm F 1157 - 90 R01Francisco GuerraPas encore d'évaluation
- Model Based Development of Future Small Electric Vehicle by ModelicaDocument8 pagesModel Based Development of Future Small Electric Vehicle by ModelicashubhamformePas encore d'évaluation
- Activity 1.1.3 Gears - VEX: N 2 GR G R N 1Document6 pagesActivity 1.1.3 Gears - VEX: N 2 GR G R N 1Nate FrieslPas encore d'évaluation
- S K Pillai Sample ChapterDocument19 pagesS K Pillai Sample ChapterDrVikas Singh BhadoriaPas encore d'évaluation
- Physics 170 - Mechanics Static EquilibriumDocument11 pagesPhysics 170 - Mechanics Static EquilibriumRona Antonio TolentinoPas encore d'évaluation
- S40 Instruction and MaintenanceDocument33 pagesS40 Instruction and Maintenancelavankumar_nuthalapatiPas encore d'évaluation
- Ata2021 Simulation Study and PID Tune of Automated Guided Vehicles AGVDocument8 pagesAta2021 Simulation Study and PID Tune of Automated Guided Vehicles AGVNguyễn Trung ThôngPas encore d'évaluation
- 500 650 HCI 750 Top Drive PDFDocument2 pages500 650 HCI 750 Top Drive PDFdraghiceanu100% (1)
- General Physics 1 Diagnostic TestDocument10 pagesGeneral Physics 1 Diagnostic TestAndria EspejoPas encore d'évaluation
- IGCSE Physics NotesDocument7 pagesIGCSE Physics NotesRhea AgrawalPas encore d'évaluation
- 0411114E 706 Torsonal Analysis PDFDocument71 pages0411114E 706 Torsonal Analysis PDFAV ShrinivasPas encore d'évaluation
- Fluid 9ed Solution ManualDocument919 pagesFluid 9ed Solution ManualMohammed Al-Otaibi86% (7)
- Short Questions-11Document44 pagesShort Questions-11Talha MaqsoodPas encore d'évaluation
- 4-12 Uht-20 SN801+Document75 pages4-12 Uht-20 SN801+Alexander DonatoPas encore d'évaluation
- Minorsky Directional StabilityDocument30 pagesMinorsky Directional StabilityEdsonPas encore d'évaluation
- Lnotes ds2007fDocument76 pagesLnotes ds2007fgirithik14Pas encore d'évaluation
- Design and Simulation of Control Systems For Electric-Assist BikesDocument5 pagesDesign and Simulation of Control Systems For Electric-Assist BikeswilliamPas encore d'évaluation
- Me 8951Document49 pagesMe 8951JHONNATHANCOLMENARESPas encore d'évaluation
- Topic 9 - TorsionDocument32 pagesTopic 9 - TorsionJane Docdoc100% (1)
- Gyro Compasses SR 120 - mk37 PDFDocument163 pagesGyro Compasses SR 120 - mk37 PDFMarine Electronics Quick SupportPas encore d'évaluation
- QSS TB ManualDocument63 pagesQSS TB Manualinno danPas encore d'évaluation
- Solution Manual For Fundamentals of Hydraulic Engineering Systems 4th Edition by Houghtalen - Compress PDFDocument6 pagesSolution Manual For Fundamentals of Hydraulic Engineering Systems 4th Edition by Houghtalen - Compress PDFpotinePas encore d'évaluation
- High Torque Geared Motors: T 238.000 NM Output Torque (175.500 LBF - FT)Document26 pagesHigh Torque Geared Motors: T 238.000 NM Output Torque (175.500 LBF - FT)SAKDA MAPRADITKULPas encore d'évaluation
- Pracical Manual For PhysicsDocument123 pagesPracical Manual For PhysicsVeerareddy VippalaPas encore d'évaluation
- Energy considerations: II 1 2 1 2 t 1 TI I 1 2 ω − ω = +Document5 pagesEnergy considerations: II 1 2 1 2 t 1 TI I 1 2 ω − ω = +Sunny VermaPas encore d'évaluation
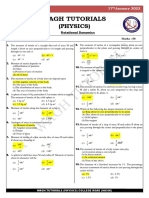
- Mock Test - 98 (17 Jan 2023) Rotational DynamicsDocument1 pageMock Test - 98 (17 Jan 2023) Rotational DynamicsparamPas encore d'évaluation
- The Learners Demonstrate An Understanding Of... The Learners Are Able To... The Learners..Document15 pagesThe Learners Demonstrate An Understanding Of... The Learners Are Able To... The Learners..Shendy AcostaPas encore d'évaluation
- Hind Geared Motor PDFDocument20 pagesHind Geared Motor PDFjayesh gohilPas encore d'évaluation