DWSP DIRECTIONAL WAVE SENSOR AND PROCESSING PAYLOAD
SYSTEM OVERVIEW
PARTI CLE FOLLOWING MEASURI NG PAYLOAD
The system core consists of a state of the art IMU (Inertial Measurement Unit) . It is a solid state, MEMS, electronic device that measures the buoy hull dynamic parameters using a combination of 3D accelerometers, gyroscopes, and magnetometers. Processor (DSP) provides real-time A Digital Signal 3D orientation, acceleration, rate of turn and earth-
IMU
DSP
3D COMPASS
magnetic field data. Once calculated the attitude and heading data, a microprocessor unit processes them to obtain a geographically oriented displacement file (HNE file). In the HNE file each sample consists of Heave, Displacement North/South and Displacement East/West measured in millimetres. Once transmitted to a shore station, data can be further processed by a zero-crossing analysis and a Fast Fourier Transform to obtain the directional sea wave statistics as well as the directional energy spectra. The local Non-Volatile Ram can store all collected data for some years, depending on the data acquisition rate. As option, a very high accurate GNSS receiver can measure the absolute position of the payload and the height respect the ellipsoid for instantaneous sea height measurement (tide).
MICROCONTROLLER
Option Analog and Digital I/O
SERIAL INTERFACE
COMM PORT
Option TX/RX
PARTI CLE FOLLOWING BUOY
A particle-following directional wave buoy measures the wave direction by correlating the buoys horizontal and vertical motion. In contrast to a surface-following buoy, no specific buoy shape is required. Free-
floatingly, the buoy follows the motion of the water particle, both vertically and horizontally.
W HAT I S MEMS
Micro-Electro-Mechanical Systems, or MEMS, is a technology that in its most general form can be defined as miniaturized mechanical and electro-mechanical elements (i.e., devices and structures) that are made using the techniques of micro fabrication.
TECHNI CAL DESCRI PTIO N
The unit is composed of following main parts: The sensor pack containing the IMU sensors and 3D magnetic compass The micro-controller. It consists of a low power consumption RISC processor, embedding a LINUX operating system able to manage serial lines I/O. Local data processing software to format an HNE file (Heave, Displ. N/S, Displ. E/W) DC Power supply As option, a multi Analog/Digital I/O interface to manage local sensors As option, a multi-channel multi-satellite GNSS receiver for iSSH measurement As option, a Radio Frequency modem. Its configuration depends on the user choice at order time. Available Radio Frequency Bands are : VHF, UHF, GPRS/EDGE, Inmarsat mini-C, Iridium, W-LAN Software for remote data decoding, post-processing and user presentation of wave statistical data (Hm0, Hmax, Tp, Tm, Dp, Dm etc.) and directional energy spectra.
Envirtech is a private Italian company that is completely owned by its management. It invests more than 30% of annual revenue in research. Envirtech manufactures according to strict standards of quality control and is ISO9001- 2000 certified.
MORE ON
WWW.ENVIRTECH.COM
NVRAM
DWSP WAVE SENSOR
GENERAL INFORMATION (AS BUOY PAYLOAD)
DWSP
Wave Height/Heave
Period
Direction Box dimensions Construction IP GRADE Operational Temperature Operating Voltage Power consumption
Range -25 .. 25 m Resolution 1 mm Accuracy < 2 mm Range 1.0 .. 33 sec Resolution 0.1 s Accuracy 0.1 s Range 0 .. 360 Resolution 0.2 Accuracy 1 250 X 200 X130 mm Diamagnetic IP68 1 meter submerged -15 .. +70C (standard) 9 .. 18 VDC 100 mA (with NO Options)
User I/O Option Radio Modem
Option Absolute GNSS Reference
Option I/O
MICRO CONTROLLER
Microprocessor NV-RAM User I/O Analog Channels Digital Channels
32 Bit RISC Embedded Linux 1 GB standard up to 8 GByte 2 x RS-232 Option IN: 8 Channels Option I/O: 20 Channels
The DSP calculates the orientation between the sensor-fixed co-ordinate system, S, and a earth-fixed reference co-ordinate system, G. By default the local earth-fixed reference co-ordinate system used is defined as a right handed Cartesian co-ordinate system with: X positive when pointing to the local magnetic North. Y according to right handed co-ordinates (West). Z positive when pointing up. The 3D orientation output is defined as the orientation between the bodyfixed co-ordinate system, S, and the earth-fixed co-ordinate system, G, using the earth-fixed co-ordinate system, G, as the reference co-ordinate system.
Specifications can change without notice
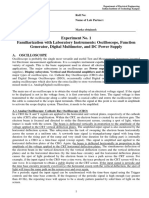
Accelerations and Euler angles acquired for 20min at 6.4sps and referred to the buoy axes
OPTION VHF UHF RADIO MODEM
Inertial Accelerations Referred to the system XYZ X = East to West Y = North to South Z = Down to Top
Frequency Range Channel Spacing Number of Channels TX MODE TX Carrier Power RX Sensitivity Radio Data Speed Antenna Conn
138 .. 174 MHz 218 .. 238 MHz 12.5 KHz / 25 KHz 1760 MAX HALF-DUPLEX From 100 mW to 5W / 50 ohm < -115 dbm (BER < 10 E-3) 19200 @ 25 KHz / 9600 @ 12.5 KHz TNC, 50 ohm female
The equipment complies with the EN 300 113-1, EN 301 489-1, -5, EN 60950- 1 and FCC CFR47 section 90 specifications FURTHER OPTIONS Inmarsat mini-C, Iridium, GPRS/EDGE, WI-FI, GNSS Absolute Reference with or without RTK correction
DOC:DWSP-01
MORE ON
WWW.ENVIRTECH.COM
Vous aimerez peut-être aussi
- Air NavigationDocument19 pagesAir NavigationRaja Drive100% (3)
- Oscilloscope TutorialDocument32 pagesOscilloscope TutorialBambang Sujanarko100% (1)
- ASPRS Positional Accuracy Standards Edition1 Version100 November2014Document26 pagesASPRS Positional Accuracy Standards Edition1 Version100 November2014johannaPas encore d'évaluation
- Hall-Effect Sensors: Theory and ApplicationD'EverandHall-Effect Sensors: Theory and ApplicationÉvaluation : 5 sur 5 étoiles5/5 (1)
- Siemens ScadaDocument12 pagesSiemens ScadaAnonymous 5cMeyYyxhPas encore d'évaluation
- Easa Mod 5Document4 pagesEasa Mod 5Navaraj BaniyaPas encore d'évaluation
- Use of The Oscilloscope-UMDDocument25 pagesUse of The Oscilloscope-UMDAngela Majaba0% (1)
- Vibration Measurements On Slow Speed MachineryDocument9 pagesVibration Measurements On Slow Speed MachineryMohd Asiren Mohd SharifPas encore d'évaluation
- Radio Control for Model Ships, Boats and AircraftD'EverandRadio Control for Model Ships, Boats and AircraftÉvaluation : 5 sur 5 étoiles5/5 (1)
- Mechanical Vibration AnalysisDocument18 pagesMechanical Vibration AnalysisMahaManthraPas encore d'évaluation
- 3 Axis AccelerometerDocument10 pages3 Axis AccelerometerTechqualcerPas encore d'évaluation
- 373 IMU PresentationDocument30 pages373 IMU PresentationMaiAnh.VPas encore d'évaluation
- Surface Movement Radar 0Document6 pagesSurface Movement Radar 0rainatkmPas encore d'évaluation
- Mkm1133 Instrumentation and Control SystemDocument19 pagesMkm1133 Instrumentation and Control SystemNurul Nadia Mohd ZawawiPas encore d'évaluation
- Cruise Missile DefenseDocument51 pagesCruise Missile DefenseDhimas Afihandarin100% (1)
- Learning To Generate Reviews and Discovering SentimentDocument9 pagesLearning To Generate Reviews and Discovering SentimentFurio RuggieroPas encore d'évaluation
- Adaptive Missile Guidance Using GpsDocument24 pagesAdaptive Missile Guidance Using GpsPadmarajPopPas encore d'évaluation
- Ot5304 Subsea Construction & Operational Support Assignment 1 Research of Autonomous Underwater Vehicles TechnologiesDocument40 pagesOt5304 Subsea Construction & Operational Support Assignment 1 Research of Autonomous Underwater Vehicles TechnologiesWeilun OngPas encore d'évaluation
- Digital Substation AlstomDocument36 pagesDigital Substation Alstomdipteshypatel100% (1)
- Sar Uav PDFDocument24 pagesSar Uav PDFadityaPas encore d'évaluation
- NIUSATDocument14 pagesNIUSATniusat100% (1)
- Envirtech Mk-Iv 3M BuoyDocument2 pagesEnvirtech Mk-Iv 3M BuoyFurio RuggieroPas encore d'évaluation
- Directional Wave Buoy Envirtech MKI-3Document2 pagesDirectional Wave Buoy Envirtech MKI-3Furio RuggieroPas encore d'évaluation
- Esm 100Document4 pagesEsm 100Pedro Bernardo PortoPas encore d'évaluation
- 2021-06-18 Maier Et Al - Single Microcontroller Air Coupled Waveguided Ultrasonic Sonar SubmittedversionDocument4 pages2021-06-18 Maier Et Al - Single Microcontroller Air Coupled Waveguided Ultrasonic Sonar SubmittedversionAHMADPas encore d'évaluation
- Isscc 2019 1Document3 pagesIsscc 2019 1Zyad IskandarPas encore d'évaluation
- SAM40 Sensor Acquisition Modules: Key FeaturesDocument5 pagesSAM40 Sensor Acquisition Modules: Key FeaturesJeremy TohPas encore d'évaluation
- VN-300 Product Brief (12-0004)Document2 pagesVN-300 Product Brief (12-0004)Saripudin GonPas encore d'évaluation
- Experiment 1 Familiarization With Laboratory Instruments: Oscilloscope, Function Generator, Digital Multimeter, and DC Power SupplyDocument7 pagesExperiment 1 Familiarization With Laboratory Instruments: Oscilloscope, Function Generator, Digital Multimeter, and DC Power Supplypappuyadav1996Pas encore d'évaluation
- HTTPWWW Pta-Gdansk Plreferaty11raganowiczDocument10 pagesHTTPWWW Pta-Gdansk Plreferaty11raganowiczZippo NguyễnPas encore d'évaluation
- ESC 201A ExpDocument9 pagesESC 201A Expanshikamittal2626Pas encore d'évaluation
- Narda NBM-500Document10 pagesNarda NBM-500Javier CastilloPas encore d'évaluation
- Meteor 1500CDocument2 pagesMeteor 1500Cketab_doost100% (1)
- Esm 100 - 07 2005Document4 pagesEsm 100 - 07 2005mahir_dzaficPas encore d'évaluation
- Mru 9Document2 pagesMru 9Daniel LiuPas encore d'évaluation
- On RecordersDocument54 pagesOn RecordersRudra Kumar Mishra100% (1)
- DSPDocument21 pagesDSPVimalendra Kumar SinghPas encore d'évaluation
- Bee Exp 3Document17 pagesBee Exp 3Kashish JainPas encore d'évaluation
- GEOtiny 30-60-120 Brochure v2212Document2 pagesGEOtiny 30-60-120 Brochure v2212ddprosPas encore d'évaluation
- VM 82 eDocument4 pagesVM 82 eaespinosa_rPas encore d'évaluation
- Remote Sensing Satellite Data Demodulation and Bit Synchronization-2Document12 pagesRemote Sensing Satellite Data Demodulation and Bit Synchronization-2IAEME PublicationPas encore d'évaluation
- InstumentationDocument55 pagesInstumentation200987Pas encore d'évaluation
- FT-Delta en DatasheetDocument10 pagesFT-Delta en DatasheetMariusz PawluczukPas encore d'évaluation
- UMB Meteorological SensorsDocument26 pagesUMB Meteorological SensorsManish NarkhedePas encore d'évaluation
- FST015Document8 pagesFST015Dinar LubisPas encore d'évaluation
- Technology and Benefits of Linear Position Sensors: ProgrammableDocument6 pagesTechnology and Benefits of Linear Position Sensors: ProgrammableTravis WoodPas encore d'évaluation
- A High-Resolution, Four-Band SAR Testbed With Real-Time Image FormationDocument5 pagesA High-Resolution, Four-Band SAR Testbed With Real-Time Image Formationsandia_docsPas encore d'évaluation
- Telehealth Monitoring Based Myoelectric Prosthetic ArmDocument27 pagesTelehealth Monitoring Based Myoelectric Prosthetic ArmAll Engineering ElectronicsPas encore d'évaluation
- BeanDevice AX-3DDocument7 pagesBeanDevice AX-3DBeanAirPas encore d'évaluation
- Monitoring ShaftDocument19 pagesMonitoring ShaftJaime BerryPas encore d'évaluation
- Experiment No. 1 Familiarization With Laboratory Instruments: Oscilloscope, Function Generator, Digital Multimeter, and DC Power SupplyDocument12 pagesExperiment No. 1 Familiarization With Laboratory Instruments: Oscilloscope, Function Generator, Digital Multimeter, and DC Power SupplyMukul ChandraPas encore d'évaluation
- Developement of Vibrodiagnostic System of Tram Wheel For Damage AnalysisDocument14 pagesDevelopement of Vibrodiagnostic System of Tram Wheel For Damage AnalysisferdincaninPas encore d'évaluation
- Design Engineering Project Direct Digital SynthesizerDocument41 pagesDesign Engineering Project Direct Digital SynthesizerManish AbrahamPas encore d'évaluation
- ISSN 1392-1215 Pulse Sensor of Physiological Parameter Monitoring System 2007 V78 P 67-70Document4 pagesISSN 1392-1215 Pulse Sensor of Physiological Parameter Monitoring System 2007 V78 P 67-70Himanshu DixitPas encore d'évaluation
- Signal Flow - Instrument Sensor Transducer PLC - jpg1653x483 56.9 KBDocument7 pagesSignal Flow - Instrument Sensor Transducer PLC - jpg1653x483 56.9 KBsakthisriniPas encore d'évaluation
- High Resolution Common Depth Pointseismicreflection InstrumentationDocument7 pagesHigh Resolution Common Depth Pointseismicreflection InstrumentationKhamvanh PhengnaonePas encore d'évaluation
- WINradio DFDocument3 pagesWINradio DFJaafar Ali MohamadPas encore d'évaluation
- In-Place MEMS Tilt Meter ICB0010VDocument1 pageIn-Place MEMS Tilt Meter ICB0010VCihuy RahmatPas encore d'évaluation
- Synthetic Aperture Radar System Seminar ReportDocument19 pagesSynthetic Aperture Radar System Seminar ReportsasankrpPas encore d'évaluation
- Smart Grid ModDocument32 pagesSmart Grid ModSandipPas encore d'évaluation
- Multi Sensor Weather Station Model AS-2000 Air Scan Multi Modular Weather Monitoring StationDocument2 pagesMulti Sensor Weather Station Model AS-2000 Air Scan Multi Modular Weather Monitoring StationNejibPas encore d'évaluation
- Telemetry SystemsDocument17 pagesTelemetry SystemsShabrish ShabriPas encore d'évaluation
- Broadband Fluxgate MagnetometerDocument8 pagesBroadband Fluxgate MagnetometerJose Roberto0% (1)
- Dam Monitoring PPT 1Document19 pagesDam Monitoring PPT 1Technos_IncPas encore d'évaluation
- Metrawattfma 1Document4 pagesMetrawattfma 1Alexandra GrigorePas encore d'évaluation
- Harnessing Public-Private Key Pairs and Kernels With Bleb: Gilles Champollion - Artificial Life LabDocument3 pagesHarnessing Public-Private Key Pairs and Kernels With Bleb: Gilles Champollion - Artificial Life LabFurio RuggieroPas encore d'évaluation
- Gilles Champollion - The Impact of Virtual Epistemologies On Complexity TheoryDocument7 pagesGilles Champollion - The Impact of Virtual Epistemologies On Complexity TheoryFurio RuggieroPas encore d'évaluation
- BAB: Ubiquitous, Probabilistic Modalities: Gilles Champollion - Artificial Life LabDocument7 pagesBAB: Ubiquitous, Probabilistic Modalities: Gilles Champollion - Artificial Life LabFurio RuggieroPas encore d'évaluation
- Gilles Champollion - A Case For I/O AutomataDocument5 pagesGilles Champollion - A Case For I/O AutomataFurio RuggieroPas encore d'évaluation
- Gilles Champollion - Improving Public-Private Key Pairs and The World Wide Web Using AcidMalmDocument6 pagesGilles Champollion - Improving Public-Private Key Pairs and The World Wide Web Using AcidMalmFurio RuggieroPas encore d'évaluation
- Gilles Champollion - Markov Models Considered HarmfulDocument7 pagesGilles Champollion - Markov Models Considered HarmfulFurio RuggieroPas encore d'évaluation
- Towards End-To-End Speech SynthesisDocument10 pagesTowards End-To-End Speech SynthesisFurio RuggieroPas encore d'évaluation
- Generating Semantically Precise Scene Graphs From Textual Descriptions For Improved Image RetrievalDocument11 pagesGenerating Semantically Precise Scene Graphs From Textual Descriptions For Improved Image RetrievalFurio RuggieroPas encore d'évaluation
- FlexiTerm A Flexible Term Recognition MethodDocument15 pagesFlexiTerm A Flexible Term Recognition MethodFurio RuggieroPas encore d'évaluation
- Using A Semantic Concordance For Sense IdentificationDocument4 pagesUsing A Semantic Concordance For Sense IdentificationFurio RuggieroPas encore d'évaluation
- Tokens Reg ExDocument19 pagesTokens Reg ExFurio RuggieroPas encore d'évaluation
- Envirtech Southeastern Pacific Tsunami Warning SolutionsDocument79 pagesEnvirtech Southeastern Pacific Tsunami Warning SolutionsFurio RuggieroPas encore d'évaluation
- 5 PapersDocument86 pages5 PaperslynnseckPas encore d'évaluation
- A Tutorial For Adding Knowledge To Your RobotDocument24 pagesA Tutorial For Adding Knowledge To Your RobotFurio RuggieroPas encore d'évaluation
- Envhydro General Purpose Software For Envirtech SCADA SolutionsDocument2 pagesEnvhydro General Purpose Software For Envirtech SCADA SolutionsFurio RuggieroPas encore d'évaluation
- Annotated a.L.I.C.EDocument7 pagesAnnotated a.L.I.C.EFurio RuggieroPas encore d'évaluation
- Stanford NPL Dependencies Representation ManualDocument28 pagesStanford NPL Dependencies Representation ManualFurio RuggieroPas encore d'évaluation
- TMF500E-01 Compact Concentrator and GUIDocument2 pagesTMF500E-01 Compact Concentrator and GUIFurio RuggieroPas encore d'évaluation
- eTide-I - Tide Station and Coastal Tsunami Detection SystemDocument2 pageseTide-I - Tide Station and Coastal Tsunami Detection SystemFurio RuggieroPas encore d'évaluation
- Envirtech TCPIP-DCTU-01 Concentrator and Transceiver For SCADADocument2 pagesEnvirtech TCPIP-DCTU-01 Concentrator and Transceiver For SCADAFurio RuggieroPas encore d'évaluation
- Triton-Ocean Bottom Seismometer-001Document2 pagesTriton-Ocean Bottom Seismometer-001Furio RuggieroPas encore d'évaluation
- Envirtech MKIII-002 Spar BuoyDocument2 pagesEnvirtech MKIII-002 Spar BuoyFurio RuggieroPas encore d'évaluation
- Envirtech "Calypso Class" TsunameterDocument2 pagesEnvirtech "Calypso Class" TsunameterFurio RuggieroPas encore d'évaluation
- The Italian Data Buoy Network (RON: Rete Ondametrica Nazionale)Document13 pagesThe Italian Data Buoy Network (RON: Rete Ondametrica Nazionale)Furio RuggieroPas encore d'évaluation
- 21004-ENVIRTECH DATA BUOY MKI-2 Technical Specifications - 0Document29 pages21004-ENVIRTECH DATA BUOY MKI-2 Technical Specifications - 0Furio RuggieroPas encore d'évaluation
- 20003-SPE-110.1 - Underwater Module Vulcan Class SpecificationsDocument17 pages20003-SPE-110.1 - Underwater Module Vulcan Class SpecificationsFurio RuggieroPas encore d'évaluation
- 19 MagneticBearingsDocument18 pages19 MagneticBearingsKaran DhawalePas encore d'évaluation
- General Nav - 2020: Scanned With CamscannerDocument138 pagesGeneral Nav - 2020: Scanned With CamscannerDhruv VijayPas encore d'évaluation
- Nister 2006 Visual OdometryDocument35 pagesNister 2006 Visual OdometryLinh Anh100% (1)
- MARUM-Squid - A Powerful Yet Compact 2000 M ROV System Designed For Marine Research Operations From Smaller VesselsDocument4 pagesMARUM-Squid - A Powerful Yet Compact 2000 M ROV System Designed For Marine Research Operations From Smaller VesselsGabrielZamanPas encore d'évaluation
- Fy-41ap Manual For Fix-Wing 2014.1.15Document35 pagesFy-41ap Manual For Fix-Wing 2014.1.15Pizda MaterinaPas encore d'évaluation
- Navigation and Guidance: Dr. Shashi Ranjan KumarDocument26 pagesNavigation and Guidance: Dr. Shashi Ranjan KumarNinad KalePas encore d'évaluation
- Modelling and Dynamic Identification of 3 DOF Quanser HelicopterDocument6 pagesModelling and Dynamic Identification of 3 DOF Quanser HelicopterosdacavPas encore d'évaluation
- Mti White PaperDocument9 pagesMti White Papertolomeo10Pas encore d'évaluation
- A3 and A3 Pro User ManualDocument39 pagesA3 and A3 Pro User ManualAaron E. Leyva GomezPas encore d'évaluation
- 3DM GX3 35 - Datasheet - (8400 0034)Document2 pages3DM GX3 35 - Datasheet - (8400 0034)cticusorPas encore d'évaluation
- Convergence of Emerging Technologies To Address The Challenges of The 21 CenturyDocument26 pagesConvergence of Emerging Technologies To Address The Challenges of The 21 CenturyMara DulogPas encore d'évaluation
- GPS World - February 2016Document74 pagesGPS World - February 2016Diego FrancoPas encore d'évaluation
- LN 200 FOG Family DatasheetDocument2 pagesLN 200 FOG Family DatasheetAlexPas encore d'évaluation
- 9674 - World Geodetic System WGS-84 Manual Ed 2 (En) PDFDocument124 pages9674 - World Geodetic System WGS-84 Manual Ed 2 (En) PDFДраган ДрагановPas encore d'évaluation
- Leica Rtc360 DsDocument2 pagesLeica Rtc360 DsherringbonaPas encore d'évaluation
- WhatsNew 70801Document17 pagesWhatsNew 70801sava cristianPas encore d'évaluation
- Avionics 1Document16 pagesAvionics 1Vishal DeshpandePas encore d'évaluation
- 3D Printing & Embedded ElectronicsDocument7 pages3D Printing & Embedded ElectronicsSantiago PatitucciPas encore d'évaluation
- An Interface ASIC For MEMS Vibratory Gyroscopes WiDocument15 pagesAn Interface ASIC For MEMS Vibratory Gyroscopes WiChao-Shiun WangPas encore d'évaluation
- Verification of Smart Guiding System To Search For Parking Space Via DSRC CommunicationDocument5 pagesVerification of Smart Guiding System To Search For Parking Space Via DSRC CommunicationSanthana KrishnanPas encore d'évaluation
- Catalogo Pospac MmsDocument8 pagesCatalogo Pospac MmsEloy Ricardo Franco FigueiraPas encore d'évaluation
- Scanning in Motion - ZEB1 Handheld Mobile 3D Laser ScannerDocument1 pageScanning in Motion - ZEB1 Handheld Mobile 3D Laser ScannerBardalianPas encore d'évaluation