Vous aimerez peut-être aussi
- Elevator Mechanic: Passbooks Study GuideD'EverandElevator Mechanic: Passbooks Study GuidePas encore d'évaluation
- ThyssenKruppEleavatos TAC32-TractionController PDFDocument2 pagesThyssenKruppEleavatos TAC32-TractionController PDFangela1590Pas encore d'évaluation
- Elevator Apprentice: Passbooks Study GuideD'EverandElevator Apprentice: Passbooks Study GuidePas encore d'évaluation
- Parameter Documents Lift GearlessDocument1 pageParameter Documents Lift GearlesstienthangvietPas encore d'évaluation
- Elevator Mechanic's Helper: Passbooks Study GuideD'EverandElevator Mechanic's Helper: Passbooks Study GuidePas encore d'évaluation
- MRL W e Pack Electrical ManualDocument154 pagesMRL W e Pack Electrical ManualLe Huynh LongPas encore d'évaluation
- ARD Connection LiftDocument5 pagesARD Connection LiftasibrahimPas encore d'évaluation
- Elevator Controller System Elevator Controller System Model FJ Model FJ - BL BL200 200 - STB STBDocument9 pagesElevator Controller System Elevator Controller System Model FJ Model FJ - BL BL200 200 - STB STBAndhias Andhi'sPas encore d'évaluation
- Unidrive SP Short Form GuideDocument122 pagesUnidrive SP Short Form GuideFlori Francu100% (1)
- AS360 Series Elevator Intergrated Controller Operation Manual V1.00 2013.9.18Document66 pagesAS360 Series Elevator Intergrated Controller Operation Manual V1.00 2013.9.18Javier MartínezPas encore d'évaluation
- Instructionmanual ElevatorDocument23 pagesInstructionmanual ElevatorLemuel GerardsPas encore d'évaluation
- Elevator Management System Software4.13 Operation ManualDocument65 pagesElevator Management System Software4.13 Operation ManualAtaur RahamanPas encore d'évaluation
- Motion 2000 Hydraulic v8 42-02-1P20 B7Document248 pagesMotion 2000 Hydraulic v8 42-02-1P20 B7ElputoAmo XD100% (1)
- Monarch Mctcpece1Document48 pagesMonarch Mctcpece1Sazzad Hossan RaselPas encore d'évaluation
- 3-FRENIC Lift PDFDocument48 pages3-FRENIC Lift PDFMoran Martines100% (1)
- Addendum For L1000A Technical Manual: Yaskawa Europe GMBH 1Document89 pagesAddendum For L1000A Technical Manual: Yaskawa Europe GMBH 1m.alfarez87gmail.comPas encore d'évaluation
- Selection Guide: Low Voltage Frequency Inverters by Fuji Electric EuropeDocument28 pagesSelection Guide: Low Voltage Frequency Inverters by Fuji Electric EuropeWatu Gîlang KencanåPas encore d'évaluation
- BA100.User ManualDocument40 pagesBA100.User ManualBaltija MechanikasPas encore d'évaluation
- Vacon NXL Lift ALFIFF28 Application Manual UD00973Document44 pagesVacon NXL Lift ALFIFF28 Application Manual UD00973TanuTiganuPas encore d'évaluation
- EC 160elevator Intelligent Integrated Machine - V1.2Document227 pagesEC 160elevator Intelligent Integrated Machine - V1.2BùiNghĩaPas encore d'évaluation
- ARCODE Compatible Absolute Encoders.V150.EnDocument3 pagesARCODE Compatible Absolute Encoders.V150.EnSaighi HamzaPas encore d'évaluation
- Schindler 3300 Ca Product Family Brochure PDFDocument32 pagesSchindler 3300 Ca Product Family Brochure PDFjorge barrerPas encore d'évaluation
- Freniclift SeriesDocument107 pagesFreniclift Seriesadzkia StorePas encore d'évaluation
- User Guide NICE900 Series Integrated Door Operator ControllerDocument99 pagesUser Guide NICE900 Series Integrated Door Operator ControllerCoil98Pas encore d'évaluation
- KLEEMANN Lift Modernisation SolutionsDocument18 pagesKLEEMANN Lift Modernisation SolutionsKleemmann Hellas SAPas encore d'évaluation
- CT Unidrive SP Elevator Solution Software User Guide - Issue 3 PDFDocument222 pagesCT Unidrive SP Elevator Solution Software User Guide - Issue 3 PDFjayb1984Pas encore d'évaluation
- E300 Elevator Drive: SI-DCP (DCP 3/4) Set-Up GuideDocument64 pagesE300 Elevator Drive: SI-DCP (DCP 3/4) Set-Up GuideMAYESTONPas encore d'évaluation
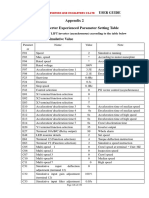
- FRENIC Lift CatalogDocument20 pagesFRENIC Lift CatalogtejoPas encore d'évaluation
- Hidra CRONO - EN81-76 Configuration Guide - enDocument8 pagesHidra CRONO - EN81-76 Configuration Guide - engianfrancoPas encore d'évaluation
- Fujitec Vietnam 1806Document8 pagesFujitec Vietnam 1806Nguyen Hung0% (1)
- nUPS-M Inverter User ManualDocument11 pagesnUPS-M Inverter User ManualخالدعبداللهPas encore d'évaluation
- Esquemas KONE 2009 PDFDocument35 pagesEsquemas KONE 2009 PDFkristerPas encore d'évaluation
- PLC Based ElevatorDocument10 pagesPLC Based ElevatorShisir KandelPas encore d'évaluation
- Unidrive SP Elevator Issue 1Document100 pagesUnidrive SP Elevator Issue 1thanggimme.phanPas encore d'évaluation
- 20190401Document232 pages20190401rendy kurniawanPas encore d'évaluation
- Arem Mobile User Manual.V101.enDocument8 pagesArem Mobile User Manual.V101.enmicrocherietPas encore d'évaluation
- Instruction Manual: Fuji Electric Co., Ltd. INR-SI47-1894-EDocument56 pagesInstruction Manual: Fuji Electric Co., Ltd. INR-SI47-1894-EXosé Nel Piedra FernándezPas encore d'évaluation
- Memcom Emergency Telephone: Installation GuideDocument90 pagesMemcom Emergency Telephone: Installation GuideAnonymous Ih1EEEPas encore d'évaluation
- Inr Si47 1038g e PDFDocument107 pagesInr Si47 1038g e PDFsd23Pas encore d'évaluation
- EN Programming ELCO Micro-ANTS LEB02 Basic Encoder V2.2 26-10-2020Document35 pagesEN Programming ELCO Micro-ANTS LEB02 Basic Encoder V2.2 26-10-2020Renny Barragan100% (1)
- MP Hydrolic ElevatorDocument22 pagesMP Hydrolic ElevatorBjorn De BenPas encore d'évaluation
- ARCODE PLC Module Manual V10.enDocument4 pagesARCODE PLC Module Manual V10.enBrahim CherguiPas encore d'évaluation
- Unidrive PDFDocument209 pagesUnidrive PDFAlejandra PerezPas encore d'évaluation
- Ev100manual en PDFDocument13 pagesEv100manual en PDFdragishabl100% (1)
- Step Chain MaintenanceDocument4 pagesStep Chain MaintenanceRenato KaindoyPas encore d'évaluation
- Eco+ Augusta: Instruction HandbookDocument48 pagesEco+ Augusta: Instruction HandbookTaimoor AhmedPas encore d'évaluation
- Mitsubishi FR A700 ManualDocument826 pagesMitsubishi FR A700 ManualTh NattapongPas encore d'évaluation
- Pdfen GIZMO - ASANSOR.KUMANDA - KARTI 1460288512 PDFDocument69 pagesPdfen GIZMO - ASANSOR.KUMANDA - KARTI 1460288512 PDFvictor de la peñaPas encore d'évaluation
- System Galaxy Quick Guide: Configuration and OperationDocument47 pagesSystem Galaxy Quick Guide: Configuration and OperationTushar ImranPas encore d'évaluation
- 4 Hyundai High Speed Elevator Catalogue - Speed Up To 6 MPS PDFDocument15 pages4 Hyundai High Speed Elevator Catalogue - Speed Up To 6 MPS PDFDemme Abdi Nasa100% (1)
- 78 Fuji SanyoDocument4 pages78 Fuji SanyoBAAAK100% (2)
- PLANODocument1 pagePLANOJavier MartínezPas encore d'évaluation
- SURAPID Elevator Company Profile PDFDocument34 pagesSURAPID Elevator Company Profile PDFLe Huynh LongPas encore d'évaluation
- ARL300 SynchronousDocument29 pagesARL300 SynchronousBrahim CherguiPas encore d'évaluation
- KM-30S User Manual.V122.enDocument16 pagesKM-30S User Manual.V122.enfarzin100% (2)
- SPS2 ManualDocument16 pagesSPS2 ManualElevator & Escalator EngineeringPas encore d'évaluation
- Blain Electronic Servo Valve - Sev - GB - 07Document34 pagesBlain Electronic Servo Valve - Sev - GB - 07Sylvester SullivanPas encore d'évaluation
- Starting Guide: 3 PH 400 VAC 2.2 - 45 KW 1 PH 200 VAC 2.2 - 4.0 KWDocument38 pagesStarting Guide: 3 PH 400 VAC 2.2 - 45 KW 1 PH 200 VAC 2.2 - 4.0 KWLogic EngineeringPas encore d'évaluation
- Motala 2000 en Tekniskt BladDocument4 pagesMotala 2000 en Tekniskt BladStacey HayesPas encore d'évaluation
- Nova Ev3200 ManualDocument25 pagesNova Ev3200 ManualCarolina Sansón100% (1)
- Significance of Different Dimensionless NumbersDocument16 pagesSignificance of Different Dimensionless NumbersMeetu KaurPas encore d'évaluation
- Stamford As440 Voltage RegulatorDocument4 pagesStamford As440 Voltage Regulatorabuzer1981100% (1)
- MomentsDocument17 pagesMomentsAbhay KumarPas encore d'évaluation
- Sysh1800 Plus 003Document1 pageSysh1800 Plus 003Kresen NaickerPas encore d'évaluation
- Design, Manufacturing of Windmill BladesDocument5 pagesDesign, Manufacturing of Windmill BladesSudhanwa KulkarniPas encore d'évaluation
- Bme (Ee) 605a-Topic-1Document37 pagesBme (Ee) 605a-Topic-1Souvik DasPas encore d'évaluation
- Generation Connection - Protection Guidelines PDFDocument24 pagesGeneration Connection - Protection Guidelines PDFhung nguyenPas encore d'évaluation
- Manual Combivert KEB PDFDocument50 pagesManual Combivert KEB PDFVladimir Colombiano de Souza100% (1)
- Determine Specific Air Capacity Using Air Conditioning UnitDocument13 pagesDetermine Specific Air Capacity Using Air Conditioning UnitTan Xing YanPas encore d'évaluation
- All India Aakash Test Series For JEE (Advanced) - 2022: TEST - 1A (Paper-1) - Code-EDocument9 pagesAll India Aakash Test Series For JEE (Advanced) - 2022: TEST - 1A (Paper-1) - Code-ENITIN NBNBPas encore d'évaluation
- AC Voltage Controllers: AC To Ac ConvertersDocument25 pagesAC Voltage Controllers: AC To Ac ConvertersPhạm Hữu Kỳ0% (1)
- 02n6a PDFDocument4 pages02n6a PDFĐiện Tử Điện LạnhPas encore d'évaluation
- Instruction Manual and Experiment Guide: Electricity System 1Document75 pagesInstruction Manual and Experiment Guide: Electricity System 1alfabicaPas encore d'évaluation
- Charging of RefrigerantDocument14 pagesCharging of RefrigerantMARIO BULANADIPas encore d'évaluation
- Tal A40 - Tal A42 - Tal A44Document17 pagesTal A40 - Tal A42 - Tal A44BilalPas encore d'évaluation
- Transition and TurbulenceDocument5 pagesTransition and TurbulenceTeodora PinheiroPas encore d'évaluation
- Uk-Lr10 4 PDFDocument2 pagesUk-Lr10 4 PDFViệt Dương ĐứcPas encore d'évaluation
- Catalogue RAC Mitsubishi ElectricDocument10 pagesCatalogue RAC Mitsubishi ElectricYizhar Bechamel MestokoPas encore d'évaluation
- Astl CH1Document86 pagesAstl CH1fildzahsyafPas encore d'évaluation
- Curriculum Vatae: Ponnapalli Satyanarayana Contact No: +91-9989905070, 8610535068Document3 pagesCurriculum Vatae: Ponnapalli Satyanarayana Contact No: +91-9989905070, 8610535068satyanarayanaPas encore d'évaluation
- Chapter No. 1 Power System Relaying by StanleyDocument72 pagesChapter No. 1 Power System Relaying by StanleyMuhammad Qanit100% (4)
- QS1QS1A LATAM CertifacationDocument13 pagesQS1QS1A LATAM Certifacationsteven6diaz-2Pas encore d'évaluation
- PBL Report CompleteDocument12 pagesPBL Report CompleteShahfizan Nasriq AliPas encore d'évaluation
- Power Electronics and Switch Mode Power Supply: Technology Training That Works Technology Training That WorksDocument21 pagesPower Electronics and Switch Mode Power Supply: Technology Training That Works Technology Training That Worksmtechsurendra123Pas encore d'évaluation
- ACS 50 User S GuideDocument20 pagesACS 50 User S GuidelupelupePas encore d'évaluation
- High-Frequency Transformer Design For Solid-State Transformers inDocument140 pagesHigh-Frequency Transformer Design For Solid-State Transformers inMitechPas encore d'évaluation
- Answer On Question #39214, Physics, Other: SolutionDocument2 pagesAnswer On Question #39214, Physics, Other: SolutionSyed Waqas AhmedPas encore d'évaluation
- OSPS Protection Settings Report Rev 0Document36 pagesOSPS Protection Settings Report Rev 0Alejandro RodriguezPas encore d'évaluation
- EXP-MN-SI020-EN-R0 - Measurements in Instrumentation PDFDocument114 pagesEXP-MN-SI020-EN-R0 - Measurements in Instrumentation PDFbali100% (3)
- Lec 1Document31 pagesLec 1Ibrahim HasanPas encore d'évaluation