Vous aimerez peut-être aussi
- Massonnet 150318133414 Conversion Gate01Document36 pagesMassonnet 150318133414 Conversion Gate01Fabrizio Biserna100% (1)
- Greutati SpecificeDocument11 pagesGreutati SpecificeAtanasoaei ConstantinPas encore d'évaluation
- Relazione Sulla Legge Dei GasDocument17 pagesRelazione Sulla Legge Dei GasRoberto BattagliaPas encore d'évaluation
- Relazione Circuito RLDocument10 pagesRelazione Circuito RLfeltroPas encore d'évaluation
- Progetto StradaleDocument10 pagesProgetto StradaleFilippoPas encore d'évaluation
- Filtro Ps AltoDocument6 pagesFiltro Ps Altorifat2842003Pas encore d'évaluation
- Andrea Arinci - Seconda Legge Della DinamicaDocument7 pagesAndrea Arinci - Seconda Legge Della DinamicaANDERPIG36 ANDERPIG36Pas encore d'évaluation
- Tablice Za Dimenzioniranje (ARMIN)Document91 pagesTablice Za Dimenzioniranje (ARMIN)benjo992100% (1)
- Fisica 5Document2 pagesFisica 5GabrielePas encore d'évaluation
- Tabla EstadisticaDocument17 pagesTabla EstadisticaMICHEL TONY HUALLPA MAMANIPas encore d'évaluation
- Esame 1Document3 pagesEsame 1Giorgio MarraraPas encore d'évaluation
- Bang TraDocument6 pagesBang TraLê Quốc Việt 10TH-35Pas encore d'évaluation
- Antonio Rizzi - (N.5) Relazione ElettronicaDocument10 pagesAntonio Rizzi - (N.5) Relazione ElettronicaStefano SecciaPas encore d'évaluation
- Relazione Fognatura BiancaDocument11 pagesRelazione Fognatura BiancaGabriele ValerioPas encore d'évaluation
- 4-Geotecnica EA PDFDocument44 pages4-Geotecnica EA PDFDawsonPas encore d'évaluation
- Diametri Sezioni e PortateDocument1 pageDiametri Sezioni e PortateRobPas encore d'évaluation
- Analisis Sismico Sin RefDocument33 pagesAnalisis Sismico Sin RefluzagredasPas encore d'évaluation
- Tarefa 9 LG1 2023-1 T06Document2 pagesTarefa 9 LG1 2023-1 T06Elmer TercioPas encore d'évaluation
- Sheet - Dimensional TolerancesDocument6 pagesSheet - Dimensional Tolerancesfederico.ceppi88Pas encore d'évaluation
- Elettronica AnalogicaDocument22 pagesElettronica AnalogicaLuigi ReveruzziPas encore d'évaluation
- Cavi Media TensioneDocument5 pagesCavi Media TensioneGiuseppe FerrariPas encore d'évaluation
- Ta ApribiliDocument48 pagesTa ApribiliAle ContiniPas encore d'évaluation
- h07v UrDocument1 pageh07v UrrealmaydosPas encore d'évaluation
- Precarico e SerraggioDocument2 pagesPrecarico e SerraggioCkaal74Pas encore d'évaluation
- Esercizio Pib Fermentatore BatchDocument28 pagesEsercizio Pib Fermentatore BatchValerio CurcioPas encore d'évaluation
- A Relazione N°3Document4 pagesA Relazione N°3davidePas encore d'évaluation
- Estad 2023 I Lab 08Document12 pagesEstad 2023 I Lab 08José CruzPas encore d'évaluation
- TabellaProgettoMsemplice0 0667Document3 pagesTabellaProgettoMsemplice0 0667David SmithPas encore d'évaluation
- Temi Esami StatoDocument22 pagesTemi Esami StatopincoPas encore d'évaluation
- Dimensionamento e Verifica Di Una PiastrDocument15 pagesDimensionamento e Verifica Di Una PiastruniversalmentePas encore d'évaluation
- Amplificatore AudioDocument7 pagesAmplificatore AudioPECAFEPas encore d'évaluation
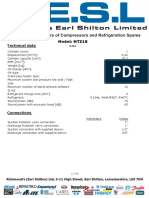
- MTZ 18Document14 pagesMTZ 18Vicente Pérez GarcíaPas encore d'évaluation
- Quad RingDocument9 pagesQuad RingmattiaPas encore d'évaluation
- tabla ultimaDocument6 pagestabla ultimajesus mataPas encore d'évaluation
- 3 CronoDocument2 pages3 CronoAlxs CalPas encore d'évaluation
- Campo Magnetico - Solenoide - 2Document2 pagesCampo Magnetico - Solenoide - 2Barriga López FernandoPas encore d'évaluation
- CondensatoreDocument4 pagesCondensatoreDavide BorghiPas encore d'évaluation
- Motore Asincrono TrifaseDocument10 pagesMotore Asincrono TrifaseMichele BenettiPas encore d'évaluation
- Esercizi CTFDocument9 pagesEsercizi CTFMarco ValeraniPas encore d'évaluation
- Anelli ElasticiDocument26 pagesAnelli ElasticiMichele TrevisiolPas encore d'évaluation
- Taller 1 - L - Manotas-C - MarulandaDocument8 pagesTaller 1 - L - Manotas-C - MarulandaLuis ManotasPas encore d'évaluation
- Professionali 2011Document9 pagesProfessionali 2011Ortensia Del LagoPas encore d'évaluation
- 01 - Studio Idraulico Marittimo Gentile GianlucaDocument37 pages01 - Studio Idraulico Marittimo Gentile GianlucaMARIOPas encore d'évaluation
- Fabris Dorian Relazione 4Document4 pagesFabris Dorian Relazione 4fabris.dorianPas encore d'évaluation
- Seismic Improvement of Existing Reinforced ConcreteDocument297 pagesSeismic Improvement of Existing Reinforced ConcreteA DubeyPas encore d'évaluation
- GEDORE Coppia Di Serragio PDFDocument12 pagesGEDORE Coppia Di Serragio PDFvaskaservPas encore d'évaluation
- Profilati Metallici Scatolari Quadrati-RettangolariDocument5 pagesProfilati Metallici Scatolari Quadrati-RettangolariAndrea GallettoPas encore d'évaluation
- Modulo e Diametral Pitch PDFDocument1 pageModulo e Diametral Pitch PDFMikel1020Pas encore d'évaluation
- Ejercicios de ClaseDocument11 pagesEjercicios de ClaseMiShelle RioSPas encore d'évaluation
- Libro 1Document4 pagesLibro 1Grace ElizabethPas encore d'évaluation
- Mincer LapizypapelDocument7 pagesMincer LapizypapelANDREA ELIZABETH MARIN MUCHAPas encore d'évaluation
- Curva Del BananoDocument24 pagesCurva Del BananoJoel VillatoroPas encore d'évaluation
- Tesi TriennaleDocument41 pagesTesi TriennaleDavide MartiniccaPas encore d'évaluation
- Relazione Dell'esperienza in Laboratorio Di Fisica: Il Pendolo Semplice.Document10 pagesRelazione Dell'esperienza in Laboratorio Di Fisica: Il Pendolo Semplice.Giorgio GullonePas encore d'évaluation
- Chiavette Linguette ManualeDocument8 pagesChiavette Linguette ManualeAlessandro GiarratanaPas encore d'évaluation
- Libro 2Document6 pagesLibro 2Agustín IdroboPas encore d'évaluation
- Laboratorio de Fisica I - MedicionesDocument12 pagesLaboratorio de Fisica I - MedicionesGABRIEL TTITO CACERESPas encore d'évaluation
- Compomac - Giunti Compolastic NEW (G)Document2 pagesCompomac - Giunti Compolastic NEW (G)Ckaal74Pas encore d'évaluation
- Tesina HookeDocument6 pagesTesina HookeUlrico BlueberriesPas encore d'évaluation
- La seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019D'EverandLa seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Pas encore d'évaluation