Vous aimerez peut-être aussi
- Understanding Connectivity Models 0210Document11 pagesUnderstanding Connectivity Models 0210m_arkettoPas encore d'évaluation
- Catalog: Testers & WidgetsDocument5 pagesCatalog: Testers & Widgetsm_arkettoPas encore d'évaluation
- Overview of RCS and VoLTE v2Document15 pagesOverview of RCS and VoLTE v2m_arkettoPas encore d'évaluation
- Good No 29Document6 pagesGood No 29m_arkettoPas encore d'évaluation
- Developing A Next-Generation Internet ArchitectureDocument21 pagesDeveloping A Next-Generation Internet Architecturem_arkettoPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- 12catm MMDocument115 pages12catm MMPirate PeterPas encore d'évaluation
- Cloud Security AssignmentDocument7 pagesCloud Security AssignmentSrijesh KhanalPas encore d'évaluation
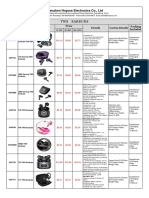
- TWS EAERBUDS Price List From HOPORA CompanyDocument15 pagesTWS EAERBUDS Price List From HOPORA CompanySindy JimenezPas encore d'évaluation
- DCIT104 Lecture 2Document56 pagesDCIT104 Lecture 2Muel OpokuPas encore d'évaluation
- 3GPP Network ArchitectureDocument18 pages3GPP Network ArchitectureRmkumars100% (1)
- PI Server Applications User Guide PI3 Server Version 3.4.370Document406 pagesPI Server Applications User Guide PI3 Server Version 3.4.370vervesolar100% (1)
- Discovering Computers Essentials 2016 1st Edition Vermaat Test Bank 1Document44 pagesDiscovering Computers Essentials 2016 1st Edition Vermaat Test Bank 1patricia100% (36)
- User S Manual HP Personal Media Drive HD0000Document11 pagesUser S Manual HP Personal Media Drive HD0000TuyuyoPas encore d'évaluation
- Agile Key With Answers-Consolidated PDF Scrum (Software Development) Agile Software DevelopmentDocument1 pageAgile Key With Answers-Consolidated PDF Scrum (Software Development) Agile Software DevelopmentReena DewanganPas encore d'évaluation
- Module 7: Memory Interfacing: Cs/Ece/Eee/Instr F241 - Microprocessor Programming & InterfacingDocument4 pagesModule 7: Memory Interfacing: Cs/Ece/Eee/Instr F241 - Microprocessor Programming & InterfacingsanaullahPas encore d'évaluation
- A Production Process Has Two Machines. The First M...Document2 pagesA Production Process Has Two Machines. The First M...Saiful IslamPas encore d'évaluation
- MFT5SEIM03 BI - OutlineDocument9 pagesMFT5SEIM03 BI - OutlineShashwat ShrivastavaPas encore d'évaluation
- מטלה 1 - קורל כהנא 205947914Document2 pagesמטלה 1 - קורל כהנא 205947914Koral ChahanaPas encore d'évaluation
- Laporan BacktrackingDocument6 pagesLaporan BacktrackingryanPas encore d'évaluation
- CIM DatabaseDocument14 pagesCIM Databasenuha zargarPas encore d'évaluation
- Android System ArchitectureDocument12 pagesAndroid System Architecturepvylale100% (2)
- Week Two Assignment ADocument1 pageWeek Two Assignment ARavalikaPas encore d'évaluation
- B660M DS3H DDR4 ManualDocument38 pagesB660M DS3H DDR4 ManualCharli Fermín Thompson MonPas encore d'évaluation
- Computer Manual (Practical)Document48 pagesComputer Manual (Practical)Muhammad Arslan YasinPas encore d'évaluation
- Inplant Training Companies For Cse Students in TrichyDocument2 pagesInplant Training Companies For Cse Students in TrichyshreesiddhiPas encore d'évaluation
- An Application of A Deep Learning Algorithm For Automatic Detection of UnexpectedDocument7 pagesAn Application of A Deep Learning Algorithm For Automatic Detection of UnexpectedNATIONAL ATTENDENCEPas encore d'évaluation
- Idea StaticaDocument18 pagesIdea StaticayasirjurabaPas encore d'évaluation
- Basic Slick GameDocument15 pagesBasic Slick GameAdilson JuniorPas encore d'évaluation
- Evermotion 58 PDFDocument2 pagesEvermotion 58 PDFCassandraPas encore d'évaluation
- Colorful Color Blocks Trucking Business Meeting Visual Charts PresentationDocument6 pagesColorful Color Blocks Trucking Business Meeting Visual Charts PresentationZuko AlexanderPas encore d'évaluation
- Direct Transient ResponseDocument24 pagesDirect Transient Responseselva1975Pas encore d'évaluation
- Soal GOJEKDocument34 pagesSoal GOJEKRyan Hegar SuryadinathaPas encore d'évaluation
- Library Management System ReportDocument23 pagesLibrary Management System ReportUdupiSri groupPas encore d'évaluation
- 01 - S 201 - CST - Cobas S 201 System Overview - V1.0Document27 pages01 - S 201 - CST - Cobas S 201 System Overview - V1.0Spinu LiliaPas encore d'évaluation
- OpenSAF Brochure FINALDocument4 pagesOpenSAF Brochure FINALnorthmirkoPas encore d'évaluation