Vous aimerez peut-être aussi
- Energy Management in Wireless Sensor NetworksD'EverandEnergy Management in Wireless Sensor NetworksÉvaluation : 4 sur 5 étoiles4/5 (1)
- Random Walks and GreenDocument3 pagesRandom Walks and GreenimbpulsrprojectPas encore d'évaluation
- Graph Theoretic Methods in Multiagent NetworksD'EverandGraph Theoretic Methods in Multiagent NetworksÉvaluation : 5 sur 5 étoiles5/5 (1)
- Opportunistic Routing in Dynamic Ad Hoc Networks: The OPRAH ProtocolDocument4 pagesOpportunistic Routing in Dynamic Ad Hoc Networks: The OPRAH Protocolsantana_bestPas encore d'évaluation
- Probabilistic Routing Using Queuing Theory For ManetsDocument15 pagesProbabilistic Routing Using Queuing Theory For ManetsJohn BergPas encore d'évaluation
- Literature SurveyDocument3 pagesLiterature SurveypooanajiPas encore d'évaluation
- Depth First Search and Location Based Localized Routing and Qos Routing in Wireless NetworksDocument13 pagesDepth First Search and Location Based Localized Routing and Qos Routing in Wireless NetworksWin WinzkyPas encore d'évaluation
- Load Balancing in WDM Networks Through Adaptive Routing Table ChangesDocument12 pagesLoad Balancing in WDM Networks Through Adaptive Routing Table ChangesKarthi KeyanPas encore d'évaluation
- Distributed Back-Pressure Scheduling With Opportunistic Routing in Cognitive Radio NetworksDocument14 pagesDistributed Back-Pressure Scheduling With Opportunistic Routing in Cognitive Radio NetworksVicky PatelPas encore d'évaluation
- Literature Review 2: Performance Analysis of Wireless NetworksDocument5 pagesLiterature Review 2: Performance Analysis of Wireless NetworksSam NilPas encore d'évaluation
- p132 Li PDFDocument9 pagesp132 Li PDFHenrique Mariano AmaralPas encore d'évaluation
- Geographic Segmented Opportunistic Routing in Cognitive Radio Ad Hoc Networks Using Network CodingDocument18 pagesGeographic Segmented Opportunistic Routing in Cognitive Radio Ad Hoc Networks Using Network Codingmohd muqrisPas encore d'évaluation
- 2013 13 LibmanDocument30 pages2013 13 LibmanGuru MekalaPas encore d'évaluation
- p186 Barrenechea PDFDocument10 pagesp186 Barrenechea PDFHenrique Mariano AmaralPas encore d'évaluation
- Joint On-Demand Routing and Spectrum Assignment in Cognitive Radio NetworksDocument5 pagesJoint On-Demand Routing and Spectrum Assignment in Cognitive Radio NetworksSatish NaiduPas encore d'évaluation
- Icimp 2016 2 30 30033Document7 pagesIcimp 2016 2 30 30033Bruno RekowskyPas encore d'évaluation
- Optimal Path Selection On TORA Algorithm Using Quadratic Assignment Techniques in WSNDocument8 pagesOptimal Path Selection On TORA Algorithm Using Quadratic Assignment Techniques in WSNMurthy MaharnaPas encore d'évaluation
- Congestion Control and QOS Improvement For AEERG Protocol in MANETDocument9 pagesCongestion Control and QOS Improvement For AEERG Protocol in MANETijansjournalPas encore d'évaluation
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument4 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)Pas encore d'évaluation
- 2 Survey Sensors 12 07350Document60 pages2 Survey Sensors 12 07350Dung Manh NgoPas encore d'évaluation
- A Clustering Routing Protocol For Mobile Ad Hoc NetworksDocument11 pagesA Clustering Routing Protocol For Mobile Ad Hoc NetworksPrasath SivaSubramanianPas encore d'évaluation
- Efficient Analysis of The Ergodic Capacity of Cooperative Non-Regenerative Relay Networks Over Generalized Fading ChannelsDocument21 pagesEfficient Analysis of The Ergodic Capacity of Cooperative Non-Regenerative Relay Networks Over Generalized Fading ChannelsJohn BergPas encore d'évaluation
- Adaptive Position Update For Geographic Routing in Mobile Ad-Hoc NetworksDocument43 pagesAdaptive Position Update For Geographic Routing in Mobile Ad-Hoc NetworksRahul BhardwajPas encore d'évaluation
- High Primary User Traffic PDFDocument5 pagesHigh Primary User Traffic PDFTalib AbbasPas encore d'évaluation
- An Individual Node Delay Based Efficient Power Aware Routing Protocol For Wireless Heterogeneous Sensor NetworksDocument10 pagesAn Individual Node Delay Based Efficient Power Aware Routing Protocol For Wireless Heterogeneous Sensor NetworksMuhammad HamidiPas encore d'évaluation
- A Game Theory Based Obstacle Avoidance Routing Protocol For Wireless Sensor NetworksDocument14 pagesA Game Theory Based Obstacle Avoidance Routing Protocol For Wireless Sensor NetworksLibotPas encore d'évaluation
- A Cluster-Based Approach For Routing in Dynamic NetworksDocument16 pagesA Cluster-Based Approach For Routing in Dynamic Networksyujay.w.linPas encore d'évaluation
- Comprehensive Study of Routing Management in Wireless Sensor Networks-Part-1Document8 pagesComprehensive Study of Routing Management in Wireless Sensor Networks-Part-1tamfinPas encore d'évaluation
- Sensors: LQER: A Link Quality Estimation Based Routing For Wireless Sensor NetworksDocument14 pagesSensors: LQER: A Link Quality Estimation Based Routing For Wireless Sensor NetworksHaouas HanenPas encore d'évaluation
- Simulation-Based Performance Evaluation of Routing Protocols For Mobile Ad Hoc NetworksDocument11 pagesSimulation-Based Performance Evaluation of Routing Protocols For Mobile Ad Hoc NetworksMeenu HansPas encore d'évaluation
- Jecet: Journal of Electronics and Communication Engineering & Technology (JECET)Document6 pagesJecet: Journal of Electronics and Communication Engineering & Technology (JECET)IAEME PublicationPas encore d'évaluation
- Balancing Energy Consumption in Wireless Sensor Networks Using Fuzzy Artificial Bee Colony Routing ProtocolDocument15 pagesBalancing Energy Consumption in Wireless Sensor Networks Using Fuzzy Artificial Bee Colony Routing ProtocolEng NoraPas encore d'évaluation
- Object Oriented Approach To Continuous Neighbor Discovery in Asynchronous Sensor NetworksDocument6 pagesObject Oriented Approach To Continuous Neighbor Discovery in Asynchronous Sensor NetworksIJERDPas encore d'évaluation
- Electrical Engineering and Computer Science DepartmentDocument19 pagesElectrical Engineering and Computer Science Departmenteecs.northwestern.eduPas encore d'évaluation
- Analysing The Interaction Between Mobility Model and Unipath Routing Protocols in Mobile Ad Hoc NetworksDocument7 pagesAnalysing The Interaction Between Mobility Model and Unipath Routing Protocols in Mobile Ad Hoc NetworkseditorijaiemPas encore d'évaluation
- P E R P W S N: Erformance Valuation of Outing Rotocols in Ireless Ensor EtworksDocument10 pagesP E R P W S N: Erformance Valuation of Outing Rotocols in Ireless Ensor EtworksHazeena HaneefPas encore d'évaluation
- Localization in Wireless Sensor Networks ThesisDocument6 pagesLocalization in Wireless Sensor Networks Thesistifqbfgig100% (2)
- Cross-Layer Routing in Wireless Mesh Networks: Luigi Iannone Ramin Khalili Kav e Salamatian Serge FdidaDocument5 pagesCross-Layer Routing in Wireless Mesh Networks: Luigi Iannone Ramin Khalili Kav e Salamatian Serge FdidaMohamed Amine Ben RachedPas encore d'évaluation
- A Dynamic Route Discovery Scheme For Heterogeneous Wireless Sensor Networks Based On Polychromatic Sets TheoryDocument13 pagesA Dynamic Route Discovery Scheme For Heterogeneous Wireless Sensor Networks Based On Polychromatic Sets TheoryCS & ITPas encore d'évaluation
- Singh 2017Document16 pagesSingh 2017Nikhil VaishPas encore d'évaluation
- J Suscom 2017 08 001Document17 pagesJ Suscom 2017 08 001Nabiel KmPas encore d'évaluation
- A New Distributed Routing Protocol For Wireless Sensor Networks With Mobile SinksDocument10 pagesA New Distributed Routing Protocol For Wireless Sensor Networks With Mobile Sinksبيكاتشو ChooPas encore d'évaluation
- Study of The Performance of Wireless Sensor Networks Operating With Smart AntennasDocument21 pagesStudy of The Performance of Wireless Sensor Networks Operating With Smart AntennasCarmen BakerPas encore d'évaluation
- Efficient Routing Leach (Er-Leach) Enhanced On Leach Protocol in Wireless Sensor NetworksDocument7 pagesEfficient Routing Leach (Er-Leach) Enhanced On Leach Protocol in Wireless Sensor NetworksNahla SayedPas encore d'évaluation
- C O S I - C I M F C N: Omparison F OME Nter ELL Nterference Odels OR Ellular EtworksDocument32 pagesC O S I - C I M F C N: Omparison F OME Nter ELL Nterference Odels OR Ellular EtworksJohn BergPas encore d'évaluation
- A Comprehensive Comparison of Routing Protocols For Large Scale Wireless MANETsDocument6 pagesA Comprehensive Comparison of Routing Protocols For Large Scale Wireless MANETsManoharPas encore d'évaluation
- Impacts of Structural Factors On Energy Consumption in Cluster-Based Wireless Sensor Networks: A Comprehensive AnalysisDocument19 pagesImpacts of Structural Factors On Energy Consumption in Cluster-Based Wireless Sensor Networks: A Comprehensive AnalysisijasucPas encore d'évaluation
- E2XLRADR (Energy Efficient Cross Layer Routing Algorithm With Dynamic Retransmission For Wireless Sensor Networks)Document11 pagesE2XLRADR (Energy Efficient Cross Layer Routing Algorithm With Dynamic Retransmission For Wireless Sensor Networks)John BergPas encore d'évaluation
- Determining The Network Throughput and Flow Rate Using GSR and Aal2rDocument10 pagesDetermining The Network Throughput and Flow Rate Using GSR and Aal2rijujournalPas encore d'évaluation
- Project Dhiraj PDFDocument181 pagesProject Dhiraj PDFRʌɓɘʋɭ IsɭʌɱPas encore d'évaluation
- Enhanced Technique For Resource Allocation inDocument5 pagesEnhanced Technique For Resource Allocation ingoldenkumarPas encore d'évaluation
- Resource Provisioning For Multigranular Traffic Flows in Multilayer NetworksDocument7 pagesResource Provisioning For Multigranular Traffic Flows in Multilayer NetworksgmarkovicPas encore d'évaluation
- 31 - JCIT - JUNE - Binder1-31Document8 pages31 - JCIT - JUNE - Binder1-31Aditya WijayantoPas encore d'évaluation
- An Efficient Routing Mechanism For Vehicular Ad Hoc NetworksDocument4 pagesAn Efficient Routing Mechanism For Vehicular Ad Hoc NetworksEditor IJRITCCPas encore d'évaluation
- Sensors: Spectrum Handoffs Based On Preemptive Repeat Priority Queue in Cognitive Radio NetworksDocument19 pagesSensors: Spectrum Handoffs Based On Preemptive Repeat Priority Queue in Cognitive Radio NetworksRòm JunePas encore d'évaluation
- A Geographic Routing Oriented Sleep Scheduling Algorithm in Duty-Cycled Sensor NetworksDocument5 pagesA Geographic Routing Oriented Sleep Scheduling Algorithm in Duty-Cycled Sensor NetworksSıla Özen GüçlüPas encore d'évaluation
- LAR MA NetDocument5 pagesLAR MA NetSatyaPas encore d'évaluation
- Link-Stability and Energy Aware Routing in Wireless Sensor NetworksDocument15 pagesLink-Stability and Energy Aware Routing in Wireless Sensor NetworksDinesh KrishnanPas encore d'évaluation
- Ubicc-Cfn 113Document13 pagesUbicc-Cfn 113Ubiquitous Computing and Communication JournalPas encore d'évaluation
- Performance of Multipath Routing For On-Demand Protocols in Mobile Ad Hoc NetworksDocument11 pagesPerformance of Multipath Routing For On-Demand Protocols in Mobile Ad Hoc NetworksSatish NaiduPas encore d'évaluation
- Exeter Summer CatalogDocument18 pagesExeter Summer Catalogdk1357Pas encore d'évaluation
- EzPDF Reader (Android) Brief GuideDocument16 pagesEzPDF Reader (Android) Brief GuideAllen SmithPas encore d'évaluation
- Pediculosis Treatment Fact SheetDocument7 pagesPediculosis Treatment Fact Sheetdk1357Pas encore d'évaluation
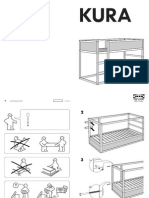
- Ikea Kura Reversible Bed 38x75 Assembly InstructionDocument14 pagesIkea Kura Reversible Bed 38x75 Assembly Instructiondk1357Pas encore d'évaluation
- SystemRecoveryManual MultiLanguage v1.1Document394 pagesSystemRecoveryManual MultiLanguage v1.1Alon ElhadadPas encore d'évaluation
- SystemRecoveryManual MultiLanguage v1.1Document394 pagesSystemRecoveryManual MultiLanguage v1.1Alon ElhadadPas encore d'évaluation
- 050-Itp For Installation of Air Intake Filter PDFDocument17 pages050-Itp For Installation of Air Intake Filter PDFKöksal PatanPas encore d'évaluation
- Test AND Measurement: Eagle PhotonicsDocument90 pagesTest AND Measurement: Eagle PhotonicsPankaj SharmaPas encore d'évaluation
- Three-Phase Induction MotorsDocument32 pagesThree-Phase Induction MotorsDimitriu CarmenPas encore d'évaluation
- Zombie RPGDocument30 pagesZombie RPGBo100% (3)
- White Paper - SuperUserDocument16 pagesWhite Paper - SuperUsermdsauberPas encore d'évaluation
- Resume - Abishek AntonyDocument4 pagesResume - Abishek AntonyabishekantonyPas encore d'évaluation
- Uber Strategy TeardownDocument44 pagesUber Strategy Teardownskouti9100% (3)
- CRI AssignmentDocument19 pagesCRI AssignmentLim Keng LiangPas encore d'évaluation
- Bridges BrochureDocument11 pagesBridges BrochureSana AlzakiPas encore d'évaluation
- CV FaisalDocument3 pagesCV FaisalAnonymous UNekZM6Pas encore d'évaluation
- Solar Street LightDocument8 pagesSolar Street LightAlizaIbrahim0% (2)
- Blinking Lights On The HP LaserJet 1018 and 1020 Printer Series - HP® Customer SupportDocument7 pagesBlinking Lights On The HP LaserJet 1018 and 1020 Printer Series - HP® Customer SupportRaghuSrinivasanPas encore d'évaluation
- Poster BC - Bored PileDocument1 pagePoster BC - Bored PileZaim Adli100% (1)
- Thermal Conductivity of Refractory Brick PDFDocument7 pagesThermal Conductivity of Refractory Brick PDFFerPas encore d'évaluation
- Fuzzy LogicDocument27 pagesFuzzy LogicvibhutiPas encore d'évaluation
- Sample Maths Exam PDFDocument11 pagesSample Maths Exam PDFAnonymous oJ0Dl7rWPas encore d'évaluation
- 17118Document5 pages17118hairilmasonPas encore d'évaluation
- USA Cutter Suction Dredger Simulator TrainingDocument2 pagesUSA Cutter Suction Dredger Simulator TrainingAbdullah Badawi BatubaraPas encore d'évaluation
- sw8 chp06Document22 pagessw8 chp06api-115560904Pas encore d'évaluation
- Best Practices For CNIP IndustriesDocument42 pagesBest Practices For CNIP IndustriesSaurabhDubeyPas encore d'évaluation
- Case Report Form (CRF) : Design and DevelopmentDocument26 pagesCase Report Form (CRF) : Design and Developmentapi-3810976Pas encore d'évaluation
- Windchill Business Administrator's GuideDocument395 pagesWindchill Business Administrator's GuidevundavilliravindraPas encore d'évaluation
- DER11001 Reference DrawingsDocument2 pagesDER11001 Reference DrawingsPrime Energy Warehouse-YemenPas encore d'évaluation
- Canvas Integration GuideDocument27 pagesCanvas Integration GuideValerie BossPas encore d'évaluation
- Dispersant Manual WebDocument108 pagesDispersant Manual Webcamilinrodriguezzzz100% (1)
- ListaDocument1 pageListaRonaldhinoFrankoPas encore d'évaluation
- Laserfiche Import Agent 9 Quick StartDocument11 pagesLaserfiche Import Agent 9 Quick StartFernando Munive ZacatzontlePas encore d'évaluation
- YUI 2.7 Cheat Sheets ConcatenatedDocument41 pagesYUI 2.7 Cheat Sheets Concatenatedcron112Pas encore d'évaluation
- The Power of Slope SpectrosDocument2 pagesThe Power of Slope SpectrosJohn SiricoPas encore d'évaluation
- MU-MIMO in LTEDocument13 pagesMU-MIMO in LTECM_123Pas encore d'évaluation
- PHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZD'EverandPHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZPas encore d'évaluation
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionD'EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionÉvaluation : 5 sur 5 étoiles5/5 (4)
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPND'EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNÉvaluation : 5 sur 5 étoiles5/5 (1)
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringD'EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringÉvaluation : 5 sur 5 étoiles5/5 (40)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamD'EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamPas encore d'évaluation
- Microsoft Certified Azure Fundamentals Study Guide: Exam AZ-900D'EverandMicrosoft Certified Azure Fundamentals Study Guide: Exam AZ-900Pas encore d'évaluation
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsD'EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsD'EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsPas encore d'évaluation
- Networking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366D'EverandNetworking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Pas encore d'évaluation
- Software-Defined Networks: A Systems ApproachD'EverandSoftware-Defined Networks: A Systems ApproachÉvaluation : 5 sur 5 étoiles5/5 (1)
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.D'EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Évaluation : 5 sur 5 étoiles5/5 (2)
- Concise Guide to OTN optical transport networksD'EverandConcise Guide to OTN optical transport networksÉvaluation : 4 sur 5 étoiles4/5 (2)
- Azure Networking: Command Line Mastery From Beginner To ArchitectD'EverandAzure Networking: Command Line Mastery From Beginner To ArchitectPas encore d'évaluation
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxD'EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (67)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsD'EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsPas encore d'évaluation
- Alcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsD'EverandAlcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsPas encore d'évaluation
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityD'EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityÉvaluation : 4.5 sur 5 étoiles4.5/5 (13)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamD'EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamÉvaluation : 5 sur 5 étoiles5/5 (1)
- Amazon Web Services (AWS) Interview Questions and AnswersD'EverandAmazon Web Services (AWS) Interview Questions and AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)